

Современные робототехнические системы давно позаимствовали у природы форму и повадки животных. Четвероногие роботы, конструктивно напоминающие собак, уже способны передвигаться по сложным поверхностям, преодолевая лестницы и препятствия там, где беспомощны колесные платформы. Однако большинство из них ограничены заранее запрограммированными навыками и плохо обучаются новым задачам в реальном мире.
Новое поколение умных роботов
Группа исследователей из Кореи, США и Швейцарии предложила инновационный подход к обучению таких машин, вдохновившись тем, как люди учат собак новым трюкам и привычкам. Вместо сложного программирования инженеры использовали простую концепцию: человек взаимодействует с роботом через физическое руководство, жесты и голосовые команды, а робот постепенно учится выполнять задачи самостоятельно. Препринт исследования выложен на портале arXiv.
В основе метода лежит наблюдение за тем, как дрессировщики привлекают внимание животных и управляют их поведением с помощью игрушек или лакомств — сначала собака просто следует за ними, а затем усваивает команду. У робота «вкусняшку» заменяет специальный тренерский жезл, за которым он следует во время обучения. Такая «приманка» позволяет собирать данные о движениях, которые затем используются для обучения модели поведения. После нескольких взаимодействий устройство начинает выполнять задачи по устным или визуальным сигналам без физического руководства.
Прорыв в реальных взаимодействиях
Помимо физического обучения, команда разработала модуль реконструкции сцен, фиксирующий действие человека и робота, чтобы впоследствии можно было воссоздавать ситуацию в симуляции. Эта информация позволяет роботу самостоятельно практиковаться и закреплять навыки. В результате испытываемый робот:
- Научился подходить к человеку;
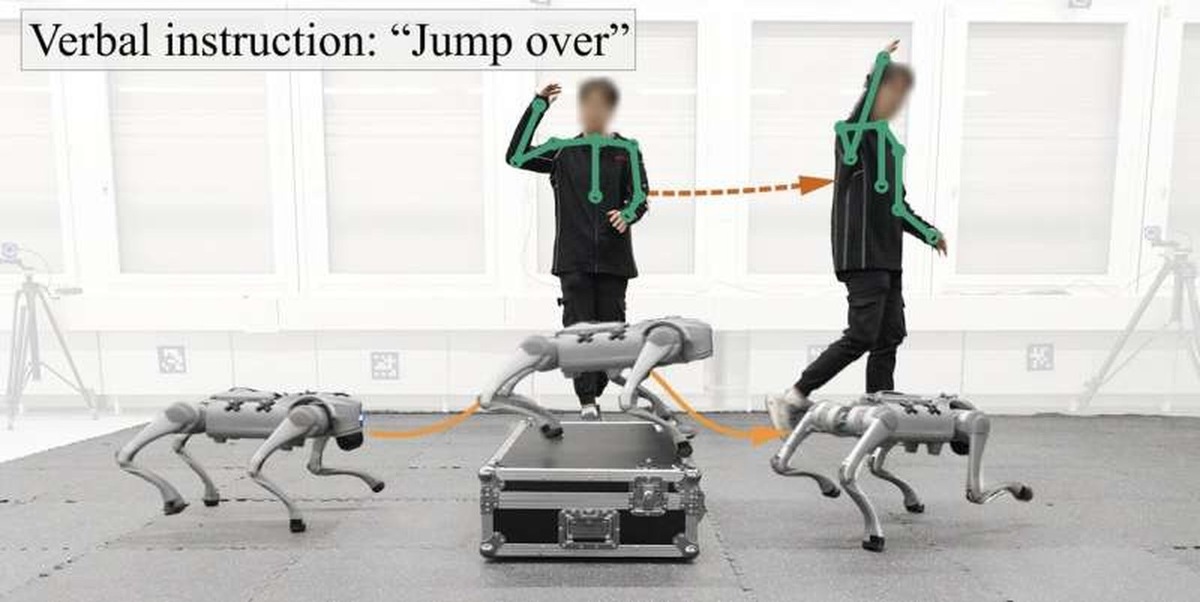
- Справляется с прыжками через препятствия;
- Может следовать за оператором;
- Уверенно огибает объекты на пути.
По словам авторов исследования, коэффициент успешного выполнения таких задач достиг 97,15% — впечатляющий показатель для первых опытов в реальных условиях.
Этот подход не только упрощает обучение роботов новым навыкам, но и делает взаимодействие с машинами более естественным для обычных пользователей, а не только для инженеров-программистов. В будущем такую методику можно будет использовать для обучения роботов бытовым операциям, подстройки поведения под индивидуального «хозяина» и интеграции машин в повседневную жизнь.
Исследователи также планируют расширить сферу применения своей методики на локо-манипуляционные задачи, где робот должен сочетать передвижение и взаимодействием с объектами, и даже адаптировать эту систему для гуманоидных роботов с управлением через жесты и голосовые команды.
Собаки не учатся в изоляции — они наблюдают, следуют и адаптируются через физическое руководство и социальные сигналы. Теперь то же самое делают наши роботы.Таерим Юн
Легендарная компания Boston Dynamics еще в 2000-х годах создавала четвероногие платформы, такие как BigDog — прототип современных робособак.
Биомиметика, или подражание природе, помогает роботу не только двигаться, но и адаптироваться к изменениям поверхности или препятствиям, как это делают живые животные. В других проектах роботов учат адаптировать походку на неизвестных поверхностях или экономно расходовать энергию, подобно собачьим движениям.
Недавно мы рассказали о робособаках с лицами миллиардеров Марка Цукерберга, Илона Маска и Джеффа Безоса.