Канал про fpv дроны, а еще нет ни одной статьи/инструкции по сборке и настройке какой нибудь семерки или десятки - подумал я. Вот решил исправить данное недоразумение.
Друг, сразу оговорюсь, если нужно быстро приступить к сборке дрона и тебе скучно читать чью то лирику, причинно-следственные связи, рассуждения по технической части - листай вниз, там всё есть).
Почему именно десятка ( fpv дрон под пропеллер 10’), а не семерка или пятерка ? Чисто индивидуальный момент. 10ку настраивать поинтереснее, да и в итоге это серьезный уровень, а хобби это как раз про уровень. ПРИНЦИП СБОРКИ АБСОЛЮТНО АНАЛОГИЧЕН ДРОНАМ И МЕНЬШИХ ПО РАЗМЕРУ РАМ, поэтому алгоритм сборки допустим 7ки , указанный в данной данная статье - идентичен. Разница будет лишь в настройке фильтров и pid регулятора.
Сразу постараюсь внести ясность и понимание многих, кто впервые приступает к созданию своего первого (или первых) дрона (дронов) - представленное «железо» в данном комплекте, самый самый бюджет, но это не означает, что в последующем на собранном из данных комплектующих дроне нельзя будет нормально летать, далеко летать и т.д. ..еще как можно и при том не хуже, чем из другого , более дорогого «железа». В этом, можно сказать, и изюминка, в том, что за сравнительно небольшие деньги можно сотворить то, что не хуже недешевых аналогов.
Проще говоря - дешевые компоненты требуют более точечных настроек в разделе pid-тюнинга (если мы говорим о betaflight конфигураторе). Всё. Многие блогеры в этой сфере прям пропагандируют только дорогое «железо» и, да, конечно, можно использовать более качественные компоненты, дорогие полетники , видики и тд , но суть их в том, что данные компоненты более устойчивы к стоковым настройкам фильтров, что мол собрал дрон, забиндил, и полетел. То есть, больше не лезь никуда и все будет ок. С бюджетной комплектухой это работает не всегда, но в этом ничего страшного нет, если понимать, что именно тебе нужно сделать. В этой статье я постараюсь прояснить этот момент.
Теперь по самим комплектующим.
Года три назад я решил собрать свой первый квад, но не было понимания откуда брать компоненты, кроме как с алика. Озон, вб, яндекс маркет, авито об этом еще ничего не знали, да и у меня самого не было ясного осознания что именно нужно, а что нет, подойдет ли модуль управления frsky на аппаратуру радиомастер, каким образом происходит бинд, чем отличается елрс от тбс, каким жалом нужно паять силовые провода.. вопросов и непонимания было миллион, кроме того не было опыта в пайке. Был ютуб, ролики по сборке дронов от Юлиана, Саня аюру и было желание вникать и изучать это направление.
Соответственно заказывал всё на алике. Шло железо мне очень долго и по частям. К примеру от момента заказа, до момента когда комплект для сборки и всё, что необходимо было у меня на столе - прошло где то месяца 2, даже чуть более. Сейчас же можно просто взять и купить всё разом и ждать чуть более пары дней. Сразу попадаются как раз такие предложения на том же озоне. Вот к примеру десятка или вот семерка. И становится немножко грустно 😅 оттого, сколько б я нервов, времени и денег сэкономил, если в мое время попался бы такой комплект в свободной продаже. Но, как говорится, ничего плохого в этом нет, может даже наоборот , это ж ведь опыт.
Начнем .
- комплект для сборки выглядит примерно вот таким образом :

и состоит из следующих составных частей: рама, стек (полетный контроллер FC и регулятор оборотов ESC), безколлекторные моторы, пропеллеры, приемник управления, видеопередатчик, антенна видеопередатчика, камера. Это, скажем так, база. То есть, то что нужно для того, чтобы дрон функционировал, но конечно , чтобы он полетел естественно необходима еще аппаратура радиоуправления (пульт), очки/шлем видеосвязи и АКБ. Также можно там уже в эту базу добавить и модуль gps для возврата долга «домой», и всякие маунты из 3d печати, датчики и другую переферию. Но мы сейчас говорим про эту саму базу.
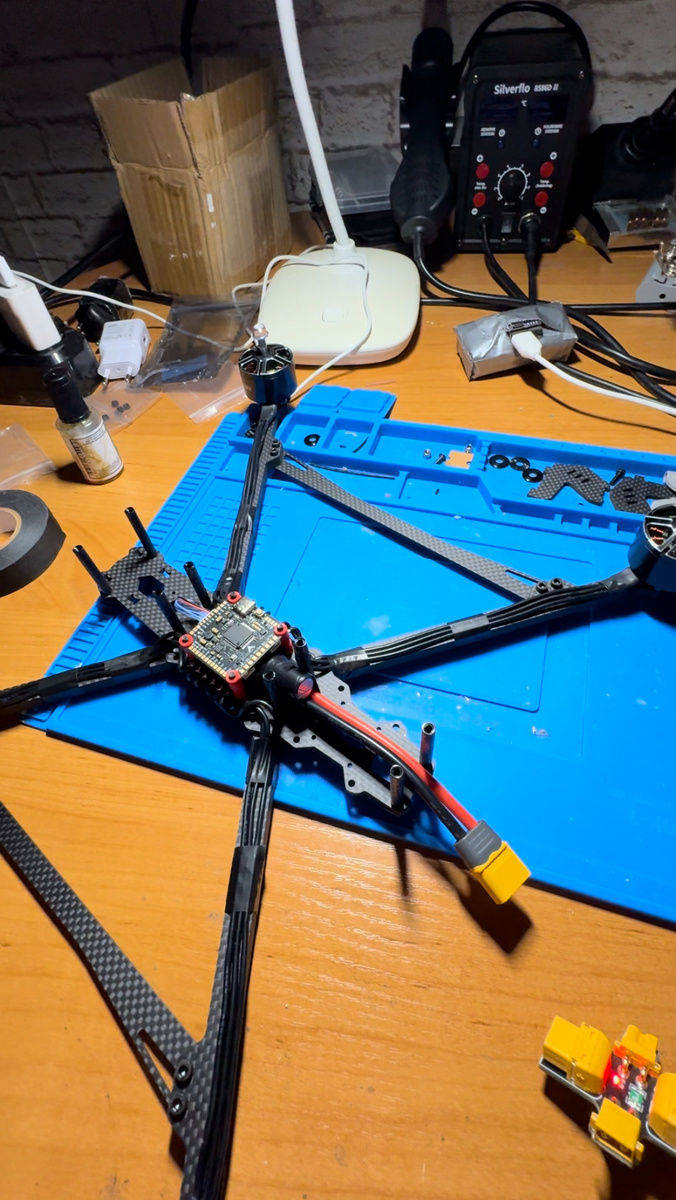
- распаковываем раму и начинаем процесс с ее сборки. Схему сборки рамы Марк 4 можно найти где угодно, поэтому останавливаться на этом не вижу смысла
- Следует заострить момент на хорошую протяжку всех мест крепления лучей к нижней платформе рамы, для получения максимальной жестокости конструкции. Многие используют фиксатор резьбы в этих целях, но я его не советую, особенно красный, ввиду того, что со временем однозначно появится люфт, и однозначно подтянуть ослабивший винт будет куда проще, нежели резьба его будет в этом самом фиксаторе. А так можно запросто «слизать» грани шестигранной отвертки.
- Прикручиваем моторы. Про надежное крепление их к раме вообще молчу.
- Берем регулятор оборотов, лудим площадки + и -, лудим ножки конденсатора (они должны быть как можно короче) . Далее припаиваем силовые провода. Сразу после , припаиваем конденсатор строго соблюдая полярность (ножка с «минусом» у конденсатора всегда обозначена). Можно , конечно, наоборот - сначала начать с конденсатора и потом уже припаять силовые провода. Тут кому как зайдет.
Делаем всё аккуратно, не разбрызгивая припой, большим чистым жалом, хорошим флюсом и припоем напаять концы проводов к площадкам
- Если есть достаточного диаметра термоусадка - используем ее, если нет , то обматываем и фиксируем всё изолентой. Здесь как предохранение от механических деформаций, так и изоляция
- Перед установкой регуля на свое штатное место, рекомендую также постелить изолирующий материал на площадку под ним
- Обрезаем провода моторов до необходимой нам длины. Длина зависит от того, как мы решили подводить концы моторов к регулятору оборотов.
- подготовив все провода, приступаем к пайке
- Как уже говорил выше, следим за тем, чтобы припой не капнул и не замкнул нам какой нибудь мосфет на регуле
- Далее подключаем шлейф от регуля к полетному контроллеру и производим первое подключение дрона к АКБ. Рекомендую делать это с использованием ,так называемого, смоукстоппера, он не позволит сгореть тому, что у нас каким то образом закоротилось.
- Если данный девайс ничего дурного нам не показал, то двигаемся дальше
- припаиваем приемник управления к полетному контроллеру. На приемнике 4 пина: ground , питание (5вольт), tx и rx. Минус к минусу , питание , соответственно на пин 5v полетника, tx приемника на любой из юартов rx полетника и также соответсвенно rx приемника на tx полетника (номер юарта tx тот же что и rx). В моем случае это rx1 и tx1
- припаиваем видеопередатчик
обычно сейчас все видики идут с протоколами управления , самые распространенные это irc tramp и smart audio, данные протоколы позволяют пилоту переключать уровни мощности с пульта, что очень удобно, также через бетку можно выставить наглядно нужную частоту. Но все это возможно только после того, как будет выставлен нужный протокол в разделе портов и загружена таблица частот и каналов с уровнями мощности того или иного видеопередатчика в бетку. Но это не значит, что видик не будет работать если вышеперечисленное не сделать. Конечно будет. Для его работы необходимо всего лишь припаять три проводка , это питание (обычно это 7-35В), земля и видео.
на этом видике 6 контактов, начнем сверху -вниз:
dc - это питание видео передатчика , как уже выше отметил , это минимум 7В;
далее подряд идут контакты на землю, один из них используется подачей «минуса» от источника , второй уже вместе с пином 5В как сам источник «минуса»;
+5В - пин вместе с одним из проводков ground можно использовать для питания камеры напрямую либо питания кулера и т.д.. но мне они не нужны , соответственно эти лишние два пина я задействовать не собираюсь;
irc - пин протокола управления, в данном случае irc trump , его запаивают на юарт и в последующем во вкладке порты указывают номер этого юарта.
- Переходим к камере. Ее мы либо припаиваем либо как в моем варианте подошел ее штатный коннектор в штатный разъем на полетели контроллере. Если б его не было, я припаял провод питания к пину на 5В, земля - к земле , видео на пин VIN
- Следующий этап - это прошивка регулятора оборотов.
в основном все регуляторы оборотов уже идут шитыми прошивкой blh-s прям с коробки. Но проблема в том, что крайнее обновление конфигуратора blh-s было в 2018 году, соответственно функционал такой прошивки явно отстает от времени. Явный пример прошивка от bluejay. Регулятор прошитый такой прошивкой имеет лучшую фильтрацию шумов идущих от моторов, что естественно сказывается на летных характеристиках дрона. Поэтому рекомендуется заливать bluejay, если регулятор оборотов с коробки с blh-s.
- Набиваем в поисковике “esc конфигуратор online”, открываем сайт и видим следующую картинку
- Закрываем бетку (вдруг если дрон был подключен к betaglight), подключаем АКБ к дрону, подключаем юсб шнур , выбираем порт вручную , нас интересует вот эта надпись
- подключаемся и видим уже эту картинку
- кликаем на кнопку «считать настройки» и видим как у нас появляются наши моторы
- далее мы можем прошить моторы как по отдельности, так и сразу все четыре выбрав кнопку “flash all”
- Появляется окно, выбираем прошивку blue jay
- выбираем версию прошивки
- По esc обычно число цепляется автоматически. После этого кликаем ‘прошить’ и все четыре движка поочередно прогрузится.
- в принципе с прошивкой регуля всё, можно при желании залить мелодию , но это уже на любителя
если конфигуратор не подключается , то возможно следует сменить кабель, либо обновить/скачать драйвер, все необходимые драйверы, точнее ссылки на них, представлены на главной странице конфигуратора. Уж очень редки случаи, когда просто сам регулятор оборотов не поддерживает эту прошивку, то есть, вышеперечисленные способы не помогли.
- подключаемся к бетке
если бетка не видит дрон, либо полетник не переходит в режим загрузчика, то причины те же , что и выше, только добавляется еще и тот фактор, что полетный контроллер мог был быть изначально прошит на inav или ардупилот и бетка его не признает , точнее в этом случае бетка открывается черным окном вкладки cli
- При необходимости , обновляем версию прошивки полетного контроллера, зажимая и удерживая перед подключением к usb кнопку boot на полетнике, после этого он переходит в режим загрузчика
- Выбираем пункт ‘программатор’, подключаемся к интернету , выбираем модель нашего полетника
- Далее - версию прошивки
не каждый полетный контроллер способен поддерживать крайние версии и релизы прошивок, поэтому чтоб наверняка , как говорится, выбираем какую нибудь 4.5.1, это если не принципиально.
- после этого кликаем на кнопку загрузить прошивку онлайн, далее прошить прошивку и уже далее , если все прошло нормально , появится надпись об успешной загрузке.
- выходим из программатора и подключаемся к бетке
- первое что мы должны сделать - это откалибровать акселерометр. Ставим квад на ровную поверхность и нажимаем ‘откалибровать’
- Далее по порядку заходим во вкладку ‘порты’ и там выбираем подключением голочек те юарты, которые у нас задействованы на полетном контроллере
первый столбец - это те самы юарты, их у нас на полетнике 6 штук, далее идет у нас следующий столбик, его мы не используем , так как у нас аналоговая видеосвязь, далее столб serial rx, это наш приемник управления, устанавливаем галочку напротив uart 2, так как мы припаяли rx и tx на соответственно tx2 и rx2.
Далее идет столб телеметрии, его я не использую.
Следующий - датчики, к примеру если б мы на какой нибудь юарт припаяли модуль GPS, то соответственно на том юарте и поставили б галочку, выбрав нужный протокол (обычно ublox).
Крайний столбец - это периферия, то есть как раз «умные» видики с возможностью управления. Устанавливаем галочку напротив uart 3, так как использовали tx3 и rx3.
- следующая вкладка - конфигурация. В принципе, можно смело копировать эти настройки себе, магнитометр в бетке работает хуже, чем плохо (на 10.10 конфигураторе, по крайней мере), поэтому если ты поставишь модуль gps, то компас , если он имеется на модуле, в бетке не используется. Обязательно устанавливаем угол арминга в 180 градусов.
Это означает, что ваш дрон заармится в любом положении. Будет к примеру другой угол, допусти 30 градусов - двигатели не будут запускаться - такое может быть когда произошел краш и дрон упал в траву, естественно он там будет лежать неровно, арма не будет. Или к примеру, вы его только собрали, все запаяли , проверили , всё правильно, а у вас на столе , поверьте будет всего всякого навалено (когда происходит этот процесс сборки, нужно чтоб у вас все было под рукой и невозможно соблюдать такой порядок, при котором на рабочей поверхности не было каких то «лишних» деталей и инструментов, соответственно дрон у вас будет лежать неровно , соответственно стоковый угол, при котором возможен арм, будет аж 25°, соответственно один луч будет чуть ниже другого , который опирается на какой нибудь предмет и всё , клацай не клацай тумблером - двигатели во вращение не придут. И начинаешь все перебирать, перепаивать искать причину, плохое настроение ….. и тд. Лично проверено. А причина то вон что была, оказывается. Поэтому , как то так .
- на прочих функциях выставляем галочки в зависимости от потребностей
- Остальные пункты конфигурации можно оставить в стоковом варианте
- далее вкладка питание и батарея .
- Далее у нас идут вкладки безопасный режим и предустановки , конкретно по этим вкладкам нужно очень подробно объяснять и эту статью я никогда не закончу если расписывать каждый раздел , на ней остановлюсь и заострю внимание как нибудь по подробнее в следующей статье
- далее настройки PID. Это еще более сложная тема и более масштабная, чем упомянутые выше вкладки, и ее бы я тоже пропустил, как и все известные блогеры делают , говоря «..оставляем там всё как есть» (с), если б не одно НО.
это фильтрация шумов. Всё просто. К примеру ты все правильно собрал, всё закрутил. Делаешь арм и дрон у тебя уходит в неадекват - трещит , ерзает или что еще хуже сам улетает или пытается сам улететь (наверное домой, в 🇨🇳) или более щадящий вариант - армится , висит в воздухе незначительное время, но моторы раскаленные как будто он тащил не себя груз в 3кг. Это всё из за недостаточной фильтрации данных (шумов, вибраций) поступающих на гироскоп от рамы и моторов.
Это тот момент, о котором я писал в начале статьи. Но как уже также обозначил- проблема решаема.
Решается быстро и грубо это одним перемещением ползунков в левое положение , но необходимо повторить арм и полет и далее смотреть по ощущениям
более тщательнее и точечно этот проблемный вопрос решается посредством программы blackbox explorer, скачать ее или использовать веб версию можно просто взять загуглив, либо скачать с главной страницы бетки
- перед тем как зайти во вкладку «приемник», настроим аппаратуру (пульт). У всех известных аппаратур радиоуправления практически один и тот же интерфейс, я буду объяснять и показывать на аппе jumper t14, у тебя может быть радиомастер тх12 , танго и тд , без разницы всё 99% схоже.
- Следующий этап - приемник. Так мы используем елрс , то мы должны установить одну и ту же бинд фразу на приемнике и на передатчике аппаратуры. Поочередно подключаемся по wi-fi к аппаратуре и приемнику, ставим одну и ту же бинд фразу и биндим дрон. Все должно сработать
Важно отметить, что версии elrs прошивки на передатчике и приемнике должны быть не старее 3.0. Иначе , указанный выше способ не сработает. Если приемник версии, к примеру 2.8, а передатчик 3.3 , то на приемник нужно накатить прошивку не ниже 3.0. Делается это через елрс конфигуратор. Его можно скачать, либо также использовать веб версию.
как только мы забиндились, во владке «приемник», данные каналы (как минимум 4 первых канала) должны перемещаться в зависимости от перемещения стиков аппаратуры.
Притом, перемещаться они должны строго по соответствующему назначаемую - рол-рол , питч- питч, яв-яв, газ-тротл. Но если , к примеру, перемешаешь газ , а импровизированный дрон на картинке начинает вращаться , то нужно правильно осуществить назначение каналов через вот эту строку
- вкладка моторы.
Так как мы прошили регулятор на bluejay, то у нас появляется возможность активировать двусторонний dshot, по-простому это дополнительная фильтрация шумов, исходящих от моторов.
Подключаем АКБ, активируем эту галочку и перемещая вертикальные бегунки проверяем вращение моторов
вращение должно быть либо такое
Либо такое
если необходима корректировка направления вращения моторов выбираем эту кнопку и вручную изменяем направление
- далее - osd. В общем , это те показатели, которые необходимы пилоту для контроля полета , просто представлю рандомный вариант
- По видео передатчику, как уже ранее писал, загружаем частотную сетку (вручную либо через командную строку) и используем радиоаппаратуру для переключения мощности
- С настройкой по минимуму (назовем это так) закончили. Теперь совершаем первый полет , отрываем от земли дрон. Можно это сделать дома, при условии соблюдения требований безопасности , необходимого опыта и осторожности.
В принципе - всё. Далее в поле, в горы, в лес и летать, летать и еще раз летать и получать удовольствие от этого интересного хобби. Надеюсь кому то помог этой статьей. Поскольку всё то что перечислил, все те проблемы , о которых упомянул , так или иначе с ними сталкивался лично, и 💯 с ними встречались и все те, кто когда то начинал этот путь. В общем удачных всем полетов, и мира всем нам🤝.
Друг, если тебе была интересна эта статья , ты узнал что то новое , что то тебя вдохновило - буду рад любой помощи 🤝. Поддержи канал - для меня это мотивация делиться полезным делом и дальше