Процесс построения 3D‑модели по фотографиям с помощью нейросетей называют структурой из движения (Structure from Motion, SfM) или многовидовой стереореконструкцией (Multi‑View Stereo, MVS). Ниже — пошаговый разбор технологии. Итог: нейросети и алгоритмы компьютерного зрения превращают плоские фото в 3D, поэтапно восстанавливая геометрию и текстуру через анализ точек, глубин и пространственных связей. Результат зависит от качества входных данных и мощности модели.
Процесс построения 3D‑модели по фотографиям с помощью нейросетей называют структурой из движения (Structure from Motion, SfM) или многовидовой стереореконструкцией (Multi‑View Stereo, MVS). Ниже — пошаговый разбор технологии.
1. Сбор входных данных
- Набор фотографий объекта с разных ракурсов (от 5–10 до сотен снимков).
- Важные условия:
перекрытие кадров (каждый элемент виден минимум на 2–3 фото);
разное освещение (помогает восстановить текстуру и рельеф);
чёткость и разрешение (чем выше, тем детальнее модель).
2. Обнаружение и сопоставление ключевых точек
- Нейросеть (или классический SfM‑алгоритм) находит на каждом фото особые точки (углы, контрастные пятна, текстуры).
- Для каждой точки вычисляется дескриптор — числовой вектор, описывающий её окружение.
- Точки с похожими дескрипторами сопоставляются между кадрами — так устанавливается пространственная связь.
3. Оценка положения камер и глубин
- По сопоставленным точкам алгоритм решает задачу калибровки камер:
определяет положение и ориентацию каждой камеры в пространстве;
вычисляет внутренние параметры (фокусное расстояние, дисторсию). - На основе триангуляции точек строится облако 3D‑точек — грубая карта поверхности.
4. Построение плотного облака точек
- Алгоритм MVS анализирует пары/тройки снимков и ищет соответствия для всех пикселей, а не только для особых точек.
- Для каждого пикселя оценивается глубина (расстояние до камеры).
- Результат — плотное облако точек, где каждая точка имеет:
3D‑координаты (x,y,z);
цвет (из исходного фото).
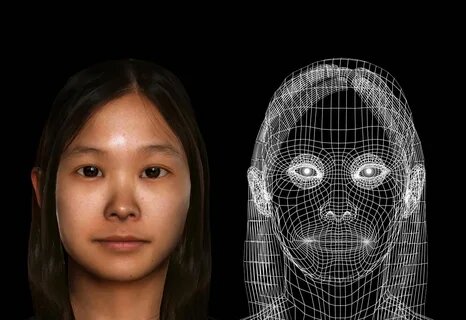
5. Реконструкция поверхности (меш)
- Из облака точек создаётся полигональная сетка (меш):
методы Poisson surface reconstruction или Delaunay triangulation строят поверхность, проходящую через точки;
алгоритмы сглаживания убирают шум и артефакты. - Сеть может дорисовать недостающие детали, опираясь на обучающие данные (например, если объект симметричен).
6. Текстурирование и финализация
- На сетку накладываются текстурные карты:
цвет (albedo);
нормали (рельеф);
шероховатость и металличность (для PBR‑материалов). - Оптимизируется топология (уменьшается число полигонов, исправляются дыры).
- Модель экспортируется в форматы: .obj, .glb, .fbx и др.
Ключевые алгоритмы и нейросети
- SfM (Structure from Motion) — восстанавливает камеру и грубое облако точек.
- MVS (Multi‑View Stereo) — строит плотное облако.
- Neural Radiance Fields (NeRF) — нейросеть, создающая 3D‑представление через непрерывные поля излучения (может работать даже с малым числом фото).
- Diffusion‑модели (например, TripoSR, Meshy) — генерируют меш и текстуры за один проход, обучаясь на миллионах 3D‑данных.
Что влияет на качество результата
- Число и разнообразие ракурсов — чем больше углов, тем полнее реконструкция.
- Освещённость — резкие тени и блики мешают сопоставлению точек.
- Текстурированность объекта — гладкие/однотонные поверхности сложнее реконструировать.
- Разрешение фото — определяет детальность меша и текстур.
- Мощность алгоритма — нейросети лучше восстанавливают семантику (например, узнают, что дверь должна быть прямоугольной).
Где применяется
- Игровая индустрия — быстрое создание ассетов из реальных объектов.
- Архитектура и реставрация — оцифровка зданий и артефактов.
- E‑commerce — 3D‑презентации товаров.
- VR/AR — наполнение виртуальных миров реалистичными моделями.
- Кино и анимация — создание цифровых двойников.
Ограничения
- Сложные формы (волосы, ткани, прозрачные объекты) реконструируются плохо.
- Малое число фото ведёт к «дыркам» в модели.
- Отражающие поверхности создают ложные соответствия.
- Вычислительные затраты — обработка сотен фото может занимать часы.
Итог: нейросети и алгоритмы компьютерного зрения превращают плоские фото в 3D, поэтапно восстанавливая геометрию и текстуру через анализ точек, глубин и пространственных связей. Результат зависит от качества входных данных и мощности модели.