
(Статья может редактироваться со временем при появлении новой информации)
Как отмечалось в моей статье №25, по заявкам на изобретения проводят, в лучшем случае, две экспертизы: формальную и, по существу, а также, помимо, Роспатент рассматривает материалы заявки на предмет содержания в них сведений, относящихся к государственной тайне.
Что касается последнего, то в материалах заявки предлагаемых ниже таких сведений не обнаружено (отмечено в моих статьях: №1; №4 и в [23 из ст.№5]).
А вот в отношении первого, то заявка была отозвана (по заявке Роспатент прекратил делопроизводство) не пройдя даже стадии формальной экспертизы, в принципе, из-за написания мной своей фамилии Семёнов в материалах заявки где-то как Семёнов, а где-то как Семенов.
Заявление в Роспатент
Я, автор и заявитель заявки на выдачу патента на изобретения «Способы посадки летательного аппарата на астероид. Частотные способы радиодальнометрии и радиопеленгации», руководствуясь положениями пункта 1 статьи 1366 «Гражданского кодекса Российской Федерации», обязуюсь, в случае выдачи мне патента на изобретение, передать исключительное право на изобретение (уступить патент), лицу, первому изъявившему такое желание и уведомившему об этом меня и федеральный орган исполнительной власти по интеллектуальной собственности – гражданину Российской Федерации или российскому юридическому лицу, на условиях, соответствующих договору заключенному между мной и покупателем моей собственности
Автор и заявитель заявки В.Л.Семенов
Реферат
Способы посадки летательного аппарата на астероид.
Частотные способы радиодальнометрии и радиопеленгации
Изобретение относится к области космической техники и позволяет осуществить посадку летательных аппаратов (ЛА) на астероид.
Цель изобретения – осуществление посадки ЛА на астероид при больших рассогласованиях траекторий движения ЛА и астероида (объектов).
Поставленная цель достигается за счет определения расстояний и направлений между объектами частотными способами радиодальнометрии и радиопеленгации.
Сажают на астероид ЛА с РЛС, излучающей ЛЧМ сигнал и принимающей отражения от астероида, а также формирующей биения, после смешивания излученных и отраженных сигналов, выделяемых фильтром (УПФ), после его, застабилизированного в трех плоскостях относительно своей орбиты и приобретшего скорость равную скорости астероида, вывода в район астероида. После чего: импульсно воздействуют на ЛА, перемещая его в сторону астероида; обнаруживают биение на выходе УПФ; повышают частоту Fм модуляции ЛЧМ сигнала, вновь: воздействуют на ЛА; обнаруживают тоже биение на выходе того же УПФ; повышают частоту Fм, и так продолжают до достижения Fм заданной величины и заданного приближения ЛА к траектории астероида. После чего, в перпендикулярной плоскости, аналогичным образом, вновь частотным способом радиодальнометрии, осуществляют приближение ЛА к траектории движения астероида. И только после этого сажают ЛА на астероид, используя частотный метод радиопеленгации для.определения знаков и величин отклонений ЛА от астероида. Причем их определение осуществляют в двух ортогональных плоскостях, при использовании двух пар приемных антенн, расположенных в плоскости перпендикулярной продольной оси ЛА, на линиях перпендикулярных друг другу и проходящих через приемопередающую антенну РЛС. Как вариант, приемную антенну, или две пары приемных антенн, на жгутах раскручивают вокруг ЛА и после определения момента стыковки, жгуты направляют к астероиду, захватывают его и подтягивают к нему ЛА. Способы посадки ЛА на астероид могут быть применены для захвата ЛА - нарушителя частной территорий, или для ударного воздействия ЛА на астероид.
Формула изобретения
1. Частотный способ радиодальнометрии, заключающийся, при приближении цели, в излучении радиолокационной станцией (РЛС) непрерывного линейно частотно модулированного (ЛЧМ) сигнала с: частотой f, изменяющейся по закону возрастающей ограниченной прямой; девиацией fд частоты; дискретно изменяемой частотой Fм модуляции с минимально возможной величиной Fм=C/2Дi, при скорости света – С; скоростью g=Fмfд изменения частоты, и выделении разностного сигнала - биения, сформированного посредством смешивания, излученного и отраженного от цели, ЛЧМ сигналов отличающийся тем, что выделяют биение с частотой Fб1=2Д1Fм1fд/С, независящее от частоты Fд Доплера, при Fм1>Fм и нахождении цели на заданном расстоянии Д1 от РЛС, плюс (+) расстояние tзVi, при скорости Vi сближения цели с РЛС (объектов); определяют момент обнаружения биения; формируют метку времени в момент обнаружения биения, после чего: фиксируют факт определения дальности Д1; дискретно увеличивают значение частоты Fм1 до FМ2; ожидают обнаружения цели – биения с частотой Fб1=Fб2=2Д2Fм2fд/С, при заданном расстоянии Д2<Д1 между объектами; формируют вторую метку времени; фиксируют факт определения дальности Д2; дискретно увеличивают значение частоты Fм2 до FМ3, и данный процесс дискретного определения заданных дальностей, при дискретном увеличении частоты Fм ЛЧМ сигнала на заданную величину и фиксировании факта определения той или иной дальности до цели по известной величине частоты Fмi, продолжают до установленной заданной величины Fмi.
2. Частотный способ радиопеленгации, заключающийся, при приближении цели, в излучении радиолокационной станцией (РЛС) непрерывного линейно частотно модулированного (ЛЧМ) сигнала с: частотой f, изменяющейся по закону возрастающей ограниченной прямой; девиацией fд частоты; дискретно изменяемой частотой Fм модуляции с минимально, при расстоянии Дi, величиной Fм=C/2Дi; скоростью g=Fмfд изменения частоты, и выделении, при частоте Fд - Доплера, разностного сигнала – биения с частотой, в частности, Fбо=2ОЦFмfд/С-Fд, сформированного посредством смешивания, излученного и отраженного от цели, ЛЧМ сигналов, при нахождении цели в точке Ц и на удалении ОЦ от РЛС,
отличающийся тем, что дополнительно: выделяют два биения с частотами: FбА=(ОЦ+ОА+АЦ)g/С-Fд и FбВ=(ОЦ+ОВ+ВЦ)g/С-Fд, при ОА=ОВ – расстояниях между двумя приемными антеннами <А> и <В> равноудаленными от приемопередающей антенны <О> РЛС и расположенными с нею на одной линии, и: АЦ и ВЦ – расстояниях между приемными антеннами и целью, биений сформированных посредством смешивания, излученного и отраженного от цели, ЛЧМ сигналов, принятых, соответственно, приемными антеннами <А> и <В>; выделяют два разностных сигнала с частотами Fб1=FбА-FбО и Fб2=FбВ-FбО, сформированных посредством смешивания сигналов FбА и FбО, а также FбВ и FбО; измеряют величины частот Fб1 и Fб2 и после вычитания одной величины из другой определяют величину их разности и знак этой величины, которым: величинам соответствуют величины углов отклонения цели от линии АВ проходящей через антенну <О> и перпендикулярную линии, проходящей через отрезки ОА и ОВ, а знакам – направление местонахождения цели относительно линии АВ и РЛС.
3. Способ посадки летательного аппарата (ЛА) на астероид, ЛА с направлением оси корпуса относительно плоскости орбиты и орбиты астероида, заключающейся в выводе, при скорости Vр ЛА равной скорости VА астероида, ЛА в заданный район нахождения астероида, ЛА с радиолокационной станцией (РЛС) на борту, излучающей, через приемопередающую антенну <О> линейно частотно модулированный (ЛЧМ) сигнал: с частотой f, изменяющейся по закону возрастающей ограниченной прямой; девиацией fд частоты; дискретно изменяемой частотой Fм модуляции с минимально возможной величиной Fм=C/2Si, при заданном расстоянии Si между ЛА и астероидом (объектами) и скорости света – С; скоростью g=Fмfд изменения частоты и временем tз=f/g, за которое свет проходит расстояние в f/fд раз большее чем расстояние Si=C/2Fм, отличающийся тем, что после вывода ЛА в заданный район нахождения астероида, используя частотный способ радиодальнометрии по п.1, при F1Мi,> FМ, начинают процесс приближения ЛА к астероиду посредством: воздействия, импульсно, реактивной силой двигателя коррекции (силой) на ЛА, перпендикулярно его продольной оси, в её сторону, и если при этом сигнал биений будет обнаружен, что будет соответствовать определению направления дальнейшего воздействия на ЛА, то, используя сформированную метку времени, дискретно, увеличивают частоту F1мi и вновь, импульсно, ускоряют ЛА в установленном направлении и ожидают нового обнаружения сигнала биений, и данный процесс сближения объектов проводят до момента, когда обнаружения астероида прекратятся, при F11Мi, на минимально установленном расстоянии между объектами в данном направлении, а если сигнал биений не будет обнаружен, при F1Мi, то проводят воздействие на ЛА в обратном направлении, по крайней мере, с удвоенной силой, и если после этого сигнал биений будет обнаружен, то, используя вновь сформированную метку времени, дискретно, увеличивают частоту Fмi и вновь ускоряют ЛА в установленном направлении и ожидают нового обнаружения сигнала биений, и данный процесс сближения объектов проводят до момента, когда обнаружения астероида прекратятся, при F11Мi, на минимально установленном расстоянии между объектами в данном направлении, а если и после этого, при F1Мi, сигнал биений не будет обнаружен, то импульсно воздействуют силой на ЛА, перпендикулярно его продольной оси, в её сторону, перпендикулярно предыдущим воздействиям, и если при этом, при F1Мi, сигнал биений будет обнаружен, что будет соответствовать определению направления дальнейшего воздействия на ЛА, то, используя вновь сформированную метку времени, дискретно, увеличивают частоту F1мi и вновь ускоряют ЛА в установленном направлении и ожидают нового обнаружения сигнала биений, и данный процесс сближения объектов проводят до момента, когда обнаружения астероида прекратятся, при F111Мi, на минимально установленном расстоянии между объектами в данном направлении, а если сигнал биений , при F1Мi, не будет обнаружен, то проводят воздействие на ЛА в обратном направлении, по крайней мере, с удвоенной силой, и если после этого сигнал биений будет обнаружен, то, используя вновь сформированную метку времени, дискретно, увеличивают частоту Fм1i и вновь ускоряют ЛА в установленном направлении и ожидают нового обнаружения сигнала биений, и данный процесс сближения объектов проводят до момента, когда обнаружения астероида прекратятся, при F111Мi, на минимально установленном расстоянии между объектами в данном направлении, после чего частоту модуляции ЛЧМ сигнала устанавливают вновь равной F1мi и вновь, аналогично, повторяют процесс сближения объектов в перпендикулярной предыдущей плоскости, до момента, когда обнаружения астероида прекратятся, при F11Мi, на минимально установленном расстоянии между объектами в данном направлении, после чего процесс сближения объектов в направлении перпендикулярных их перемещениям прекращают, и начинают процесс сближение объектов вдоль траекторий их движения, импульсно затормозив ЛА до скорости Vрi=VА-V, где V – допустимая стыковочная скорость объектов и установив частоту модуляции равной F1111м и, после обнаружения астероида на заданном удалении от ЛА, определяемым частотой F1111м, процессы сближения объектов частотным способом радиодальнометрии по п. 1 прекращают, в момент начала стыковки объектов, и начинают процесс посадки ЛА на астероид частотным способом радиопеленгации по п.2, посредством определения знаков отклонений траектории движения ЛА от траектории движения астероида, а также определения величин этих отклонений, причем определение знаков и величин осуществляют в двух ортогональных (вертикальной и горизонтальной) плоскостях, при использовании двух пар приемных антенн РЛС: <А> и <В>, а также <М> и <Д>, расположенных в плоскости перпендикулярной продольной оси ЛА, на концах отрезков АВ и МД линий перпендикулярных друг другу и проходящих через точку О – место расположения антенны <О> РЛС на продольной оси ЛА, в носовой, или кормовой части, ЛА, и после определение знаков и величин рассогласований, в нужных направлениях, импульсно уменьшают величины рассогласований до допустимых значений – момента начала процесса стыковки, при необходимости, способом по п.10, и сажают ЛА на астероид.
4. Способ посадки ЛА на астероид по п.3, отличающийся тем, что после определения момента начала стыковки объектов, в направлениях должных мест установок приемных антенн, из ЛА, перпендикулярно его продольной оси, запускают приемные антенны <А> и <В>, а также <М> и <Д>, привязанные между собой жгутами равной длинны и равной длинны: АО=ВО=МО=ДО жгутами к жесткому стержню – продолжению продольной оси ЛА, который, после натяжения жгутов, вращаясь раскручивает приемные антенны по окружности, приемные антенны, которые по высокочастотным кабелям равной длинны: АО=ВО=МО=ДО
связаны с входами соответствующих смесителей на РЛС, при этом, после определения момента окончания процесса стыковки, жгуты направляют в сторону астероида и захватывают ими астероид, и после этого подтягивают ЛА к астероиду.
5. Способ посадки ЛА на астероид по п.3, отличающийся тем, что после определения момента начала стыковки объектов, перпендикулярно оси ЛА запускают мини РЛС с приемопередающей антенной <К>, принимающей отраженный от астероида ЛЧМ сигнал, который после усиления пере излучается в сторону антенны <О>, мини РЛС, привязанную жгутом длинной R к жесткому стержню, являющимся продлением продольной оси ЛА, рядом с антенной <О>, и под действием вращения стержня, после натяжения жгута, мини РЛС раскручивают по окружности радиусом R и ожидают появления сигналов биений с частотами: FбА=(Д1+R+SА)Fм1fд/С и FбВ=(Д1+R+SВ)Fм1fд/С, формируемые после пересечения антенной <К> первой плоскости, проходящей через продольную ось ЛА, в точках А и В окружности вращения мини РЛС, и FбМ=(Д1+R+SМ)g/С и FбД=(Д1+R+SД)g/С, формируемые после пересечения антенной <К> второй плоскости, проходящей через продольную ось ЛА в точках М и Д окружности вращения мини РЛС, и перпендикулярную первой плоскости, где SА, SВ, SМ, SД и Д1– расстояния от астероида до соответствующих точек окружности радиуса R и от астероида до антенны <О>, две взаимно перпендикулярные плоскости пересекающие борта ЛА в тачках, соответственно, А1 и В1, а также М1 и Д1, в которых устанавливают реактивные мини двигатели, способные перемещать ЛА в сторону астероида, после определения знаков разности измеренных частот FбА-FбВ и FбМ-FбД, измеренных при прохождении жгута в районах точек А1, В1, М1 и Д1 бортов ЛА, через равные интервалы tизв времени и после запоминания измеренных величин: FбА, FбВ , FбМ и FбД, и процесс сближения объектов в установленных направлениях осуществляют до моментов сравнения величин частот: FбА=FбВ и FбМ=FбД, после чего, в зависимости от расположения объектов, ЛА затормаживают или ускоряют и ожидают обнаружения сигнала с заданной частотой Fбзад=2Дзадfд/С биений, на заданном удалении Дзад ЛА от астероида, и после замедления торможения (ускорения) ЛА его сажают на астероид, посредством остановки вращения антенны <К> и направления её в сторону астероида А, и после соприкосновения антенны с астероидом его подтягивают к ЛА, посредством сматывания жгута.
6. Применение способов посадки ЛА на астероид по п.п.4 и 5 в качестве способов захвата ЛА - нарушителя частной территории, при установке РЛС и мини РЛС на ЛА <<охотнике>>, летящим впереди <<нарушителя>>.
7. Способ посадки ЛА на астероид по п.3, отличающийся тем, что ЛА, выполненный из двух частей, жестко связанных между собой и перемещающихся тандемом, сажают на астероид при встречных курсах сближения объектов, при этом, перед соприкосновением объектов ЛА разделяется надвое, первая часть из которых, при ударе об астероид, делает в нём воронку, а вторая, по инерции, садится в воронку.
8. Применение способа посадки ЛА на астероид по п.7 в качестве способа воздействия на астероид, при снабжении первой части ЛА боеприпасом с детонатором ударного действия, а второй части боеприпасом, при необходимости атомной бомбой, с радио взрывателем.
9. Частотный способ радиодальнометрии по п.1, отличающийся тем, что выделяют и обнаруживают сигналы биений, а также формируют метки времени при постоянных параметрах ЛЧМ сигнала, при этом, через время tз после формирования метки времени и расстоянии между объектами Дi+Vitз, а также при их сближении со скоростью Vi, обнаруживаемые сигналы биений, с одной и той же заданной частотой Fбi=2ДiFмifдi/С, смешивают с сигналами биений с частотами Fбi – Fдi, формируемыми на данные моменты времени, и выделяют сигналы с частотами Fдi Доплера, величинам которых, при постоянстве и знании скорости одного из сближающихся объектов, например, скорости VА астероида, будут соответствовать величины расстояний Дх=(СFдi-2VАf)2g между объектами, вычисленные заранее и хранящиеся в запрограммированном постоянном запоминающем устройстве (ППЗУ), и списываемые из него в соответствии со значениями цифровых чисел, соответствующих значениям величин частот Fдi.
10. Способ стыковки ЛА с астероидом, заключающийся в излучении установленной РЛС на ЛА, через приемопередающую антенну <О>, ЛЧМ сигнала: с частотой f, изменяющейся по закону возрастающей ограниченной прямой; девиацией fд частоты; частотой Fм=C/2Д модуляции, при максимальном однозначном определении дальностиз Д и скорости света – С; скоростью g=Fмfд изменения частоты, а также в смешивании излученного и отраженного от астероида ЛЧМ сигналов, и в выделении, сформированных после смешивания, разностных сигналов биений (биений), отличающийся тем, что, при заданном расстоянии Д1 между сближающимися со скоростью Vi объектами, выделяют, пораздельно, при времени С/2Fм=t1+t2, два биения: сначала первое, в течении времени С/2Fм-t2, с частотой Fб1=fд2Д12Fм/С-2Vif/С, которое задерживают на время tлз<t1; затем второе, в течении времени t1, с частотой, Fб2=2fд[(С/2Fм)-Д1]2Fм/С-2Vif/С=2fд-Fб1-2Vif/С, и после смешивания биений с частотами Fб1 и Fб2 формируют разностный сигнал с известной частотой FбР=2fд-2Fб1, независящий от частоты Доплера, факт возникновения которого, после его выделения и обнаружения, свидетельствует о том, что между объектами заданное расстояние Д1, позволяющеее проводить стыковку объектов, при минимально заданной скорости Vmin их сближения, которую определяют, после обнаружения сигнала с частотой FбР, посредством определения: возникают ли на РЛС сигналы биения с частотами Fб11=fд2Д12Fм/С и Fб12=2fд-Fб1, т. е. при Vi близкой к нулю, и если формируются, выделяются и обнаруживаются, то считают, что объекты сближаются с допустимой скоростью, позволяющей проводить стыковку, а если нет, при большей допустимой скорости сближения, то импульсно, при необходимости многократно, замедляют движение ЛА, до момента возникновения сигналов с частотами Fб11 и Fб12, при очередном возникновении разностного сигнала с частотой FбР.
B64G99/00
Способы посадки летательного аппарата на астероид.
Частотные способы радиодальнометрии и радиопеленгации
Изобретение относится к области космической техники и позволяет осуществить посадку летательных аппаратов (ЛА) на астероид.
Существуют два основных способа сохранить постоянное направление оси корпуса спутника относительно плоскости геостационарной орбиты: это стабилизация вращением, когда, обычно для стационарных спутников ось вращения (стабилизации) выбирается параллельной оси Земли, и стабилизация по трем осям, осуществляемая при управлении угловым положением спутника относительно каждой из трех осей координат [ВИКИПЕДИЯ].
Известен способ измерения скорости сближения ракеты с астероидом, посредством измерения интервала времени между моментами обнаружения двух сигналов биений, сформированных на частотном радиолокаторе, после смешивании излученного и отраженного от астероида ЛЧМ сигналов и при пролете ракетой известного интервала расстояния [патент РФ №2521822]
Известен способ перемещения самолета заправщика параллельно курсу дозаправляемого самолета, при котором на самолете заправщике обнаруживают, по крайней мере, два сигнала биений, формируемых после смешивании излученного и отраженного от дозаправляемого самолета ЛЧМ сигналов: одного биения, при нахождении самолета на более близком заданном расстоянии от дозаправляемого самолета, а второго, при нахождении на более дальнем заданном расстоянии. При этом, при обнаружениях аналогичных первому обнаружению, полет самолета заправщика корректируют в сторону дозаправляемого самолета, а при обнаружениях аналогичных второму обнаружению - в обратную сторону. Следует отметить, что подобным образом можно поддерживать и равенство скоростей двух самолетов, при обнаружении дозаправляемого самолета на заданных удалениях от заправщика и ускорения(торможения) последнего [патент РФ №2521822].
Известен способ посадки ЛА на планеты (Землю) и их спутники (Луну), посредством вывода ЛА на околоземную орбиту, его торможение и приземление. Известен способ стыковки ЛА с орбитальной станцией, заключающийся в выводе ЛА в район нахождения станции и после проведения ряда корректирующих маневров ЛА, проведение его стыковки со станцией [ВИКИПЕДИЯ].
Цель изобретения – осуществление посадки ЛА на астероид при больших рассогласованиях траекторий движения ЛА и астероида (объектов).
Поставленная цель достигается за счет определения расстояний и направлений между объектами частотными способами радиодальнометрии и радиопеленгации.
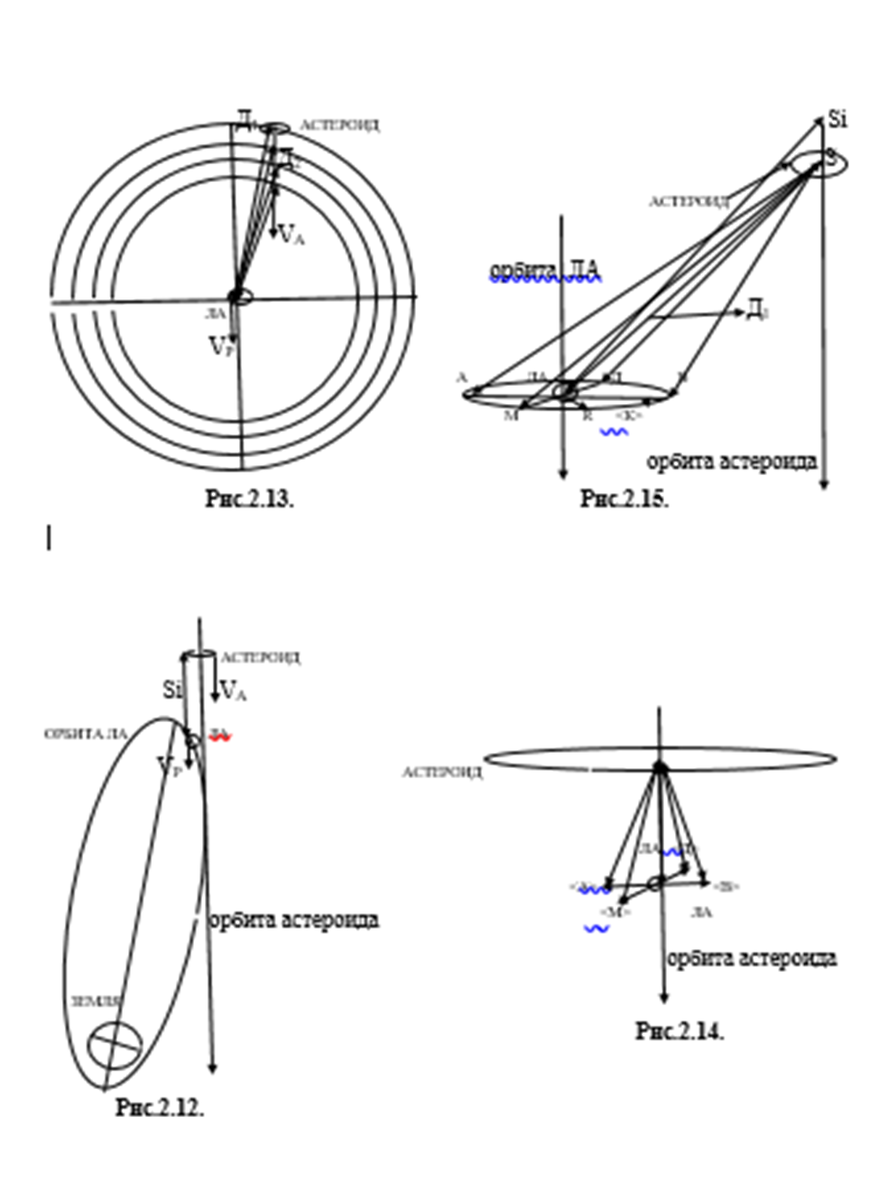
На фиг. 1, 2, 3, 4 и 5 приведены рисунки, поясняющие посадку ЛА на астероид.
Для посадки на астероид ЛА с РЛС, излучающей, через приемопередающую антенну <О> линейно частотно модулированный (ЛЧМ) сигнал: с частотой f, изменяющейся по закону возрастающей ограниченной прямой; девиацией fд частоты; дискретно изменяемой частотой Fм модуляции с минимально возможной величиной Fм=C/2Si, при заданном расстоянии Si между ЛА и астероидом (объектами) и скорости света – С; скоростью g=Fмfд изменения частоты и временем tз=f/g, за которое свет проходит расстояние в f/fд раз большее чем расстояние Si=C/2Fм, необходимо, известными способами: вывести ЛА в заданный район, фиг.1, нахождения астероида, предварительно застабилизировав направление оси корпуса ЛА относительно плоскости его орбиты и орбиты астероида, а также уровняв скорости передвижения объектов. Т. е. обеспечить объектам параллельное перемещение при постоянном удалении между ними. После чего, при F1Мi,>FМ, приблизить ЛА к астероиду, фиг.2, 3, посредством: воздействия, импульсно, реактивной силой двигателя коррекции (силой) на ЛА, перпендикулярно его продольной оси, в её сторону. И если после этого сигнал биений (биение) с частотой Fб1=2Д1F1Мifд/С, сформированный после смешивания в смесителе (ССМ) РЛС излученного и отраженного от астероида ЛЧМ сигналов и выделенного узкополосным полосовым фильтром (УПФ), будет обнаружен, что будет соответствовать определению направления дальнейшего воздействия на ЛА, то, используя сформированную в момент обнаружения биения метку времени – короткий импульс, дискретно, увеличивают частоту F1мi и вновь, импульсно, ускоряют ЛА в установленном направлении и ожидают нового обнаружения сигнала биений. И данный процесс сближения объектов проводят до момента, когда обнаружения астероида прекратятся, при F11Мi и той же частоте биения, на минимально установленном расстоянии между объектами в данном направлении. А если сигнал биений не будет обнаружен, при F1Мi, то проводят воздействие на ЛА в обратном направлении, по крайней мере, с удвоенной силой. И если после этого сигнал биений будет обнаружен, то, используя вновь сформированную метку времени, дискретно, увеличивают частоту Fмi и вновь ускоряют ЛА в установленном направлении и ожидают нового обнаружения сигнала биений. И данный процесс сближения объектов проводят до момента, когда обнаружения астероида прекратятся, при F11Мi, на минимально установленном расстоянии между объектами в данном направлении. А если и после этого, при F1Мi, сигнал биений не будет обнаружен, то импульсно воздействуют силой на ЛА, перпендикулярно его продольной оси, в её сторону, перпендикулярно предыдущим воздействиям. И если при этом, при F1Мi, сигнал биений будет обнаружен, что будет соответствовать определению направления дальнейшего воздействия на ЛА, то, используя вновь сформированную метку времени, дискретно, увеличивают частоту F1мi и вновь ускоряют ЛА в установленном направлении и ожидают нового обнаружения сигнала биений, и данный процесс сближения объектов проводят до момента, когда обнаружения астероида прекратятся, при F111Мi, на минимально установленном расстоянии между объектами в данном направлении. А если сигнал биений, при F1Мi, не будет обнаружен, то проводят воздействие на ЛА в обратном направлении, по крайней мере, с удвоенной силой, и если после этого сигнал биений будет обнаружен, то, используя вновь сформированную метку времени, дискретно, увеличивают частоту Fм1i и вновь ускоряют ЛА в установленном направлении и ожидают нового обнаружения сигнала биений, и данный процесс сближения объектов проводят до момента, когда обнаружения астероида прекратятся, при F111Мi, на минимально установленном расстоянии между объектами в данном направлении. После чего частоту модуляции ЛЧМ сигнала устанавливают вновь равной F1мi и вновь, аналогично, повторяют процесс сближения объектов в перпендикулярной предыдущей плоскости, до момента, когда обнаружения астероида прекратятся, при F11Мi, на минимально установленном расстоянии между объектами в данном направлении. После чего процесс сближения объектов в направлении перпендикулярных их перемещениям прекращают. И начинают процесс сближение объектов вдоль траекторий их движения, импульсно затормозив ЛА до скорости Vрi=VА-V, где V – допустимая стыковочная скорость объектов и установив частоту модуляции равной F1111м. И после обнаружения астероида на заданном удалении от ЛА, определяемым частотой F1111м, процессы сближения объектов частотным способом радиодальнометрии по п. 1 прекращают, в момент начала стыковки объектов. Расчеты показывают, что при параметрах ЛЧМ сигнала: несущей f=3ГГц; девиацией частоты fд=12МГц; дискретно изменяемой частоте Fм=C/2Si=25Гц модуляции; скорости g=Fмfд=3х108Гц2 изменения частоты и выводе ЛА на удаление порядка Д1=5000км от астероида, а также использования для выделения биений фильтра с центральной частотой fц=10МГ его полосы в 10КГц, можно обнаружить астероид, с дискретом по дальности в 5км (фиг.2), при изменении частоты Fм с дискретом по частоте в 0,05Гц. После чего начинают процесс посадки ЛА на астероид частотным способом радиопеленгации по п.2. Посадку ЛА посредством определения знаков отклонений траектории движения ЛА от траектории движения астероида, а также определения величин этих отклонений. Причем определение знаков и величин осуществляют в двух ортогональных (вертикальной и горизонтальной) плоскостях, при использовании двух пар приемных антенн РЛС: <А> и <В>, а также <М> и <Д>, расположенных в плоскости перпендикулярной продольной оси ЛА, на концах отрезков АВ и МД линий перпендикулярных друг другу и проходящих через точку О – место расположения антенны <О> РЛС на продольной оси ЛА, в носовой, или кормовой части, ЛА. И после определение знаков и величин рассогласований, в нужных направлениях, импульсно уменьшают величины рассогласований до допустимых значений и сажают ЛА на астероид.
Как вариант, после определения момента начала стыковки объектов, вокруг продольной оси ЛА можно раскрутить по окружности, привязанные между собой и к врощающемусю стержню – продолжению оси ЛА, жгутами равной длинны. Приемные антенны, запущенные перпендикулярно оси ЛА для натяжения жгутов и передающие, через высокочастотные кабели равной длинны, на входы соответствующих смесителей на РЛС, принятые ими отражения от астероида. При
этом, после определения момента окончания процесса стыковки, приемные антенны направляют в сторону астероида, которые захватывают его и после этого подтягивают ЛА к астероиду, посредством сматывания жгутов. Посадить ЛА на астероид можно также, если после окончания процесса выравнивания скоростей перпендикулярно оси ЛА запустить мини РЛС с приемопередающей антенной <К>, принимающей отраженный от астероида ЛЧМ сигнал, который после усиления пере излучается в сторону антенны <О>. Мини РЛС, привязанную жгутом длинной R к жесткому стержню, являющимся продлением продольной оси ЛА, рядом с антенной <О>, и под действием вращения стержня, после натяжения жгута, мини РЛС раскрутить по окружности радиусом R и ожидать появления сигналов биений с частотами: FбА=(Д1+R+SА)Fм1fд/С и FбВ=(Д1+R+SВ)Fм1fд/С, формируемые после пересечения антенной <К> первой плоскости, проходящей через продольную ось ЛА, в точках А и В окружности вращения мини РЛС. И FбМ=(Д1+R+SМ)g/С и FбД=(Д1+R+SД)g/С, формируемые после пересечения антенной <К> второй плоскости, проходящей через продольную ось ЛА в точках М и Д окружности вращения мини РЛС, и перпендикулярную первой плоскости, где SА, SВ, SМ, SД и Д1– расстояния от астероида до соответствующих точек окружности радиуса R и от астероида до антенны <О>. Две взаимно перпендикулярные плоскости пересекающие борта ЛА в тачках, соответственно, А1 и В1, а также М1 и Д1, в которых устанавливают реактивные мини двигатели, способные перемещать ЛА в сторону астероида, после определения знаков разности измеренных частот FбА-FбВ и FбМ-FбД, измеренных при прохождении жгута в районах точек А1, В1, М1 и Д1 бортов ЛА, через равные интервалы tизв времени и запомнить измеренные величины: FбА, FбВ , FбМ и FбД, И процесс сближения объектов в установленных направлениях осуществлять до моментов сравнения величин частот: FбА=FбВ и FбМ=FбД. После чего, в зависимости от расположения объектов, ЛА затормазить или ускорить и ожидать обнаружения сигнала с заданной частотой Fбзад=2Дзадfд/С биений, на заданном удалении Дзад ЛА от астероида. И после замедления торможения (ускорения) ЛА его посадить на астероид, посредством остановки вращения антенны <К> и направления её в сторону астероида. И после соприкосновения антенны с астероидом его подтянуть к ЛА, смотав жгут.
Очевидно, что способы посадки ЛА на астероид с помощью гибких жгутов можно использовать для захвата (пленения) ЛА - нарушителей частных территорий, при установке РЛС и мини РЛС на ЛА <<охотнике>>, запускаемым и перемещающимся впереди <<нарушителя>>. А при сближении объектов встречными курсами можно осуществить ударное воздействие ЛА на астероид.
Также очевидно, что для того чтобы приблизить ЛА к астероиду необходимо, по крайней мере, обнаружить астероид и только после этого, и после выявления той или иной информации об астероиде, осуществить те, или иные, действия. При предлагаемом способе сближения объектов, как видно, достаточно всего лишь обнаружить астероид и не выявлять, какой либо, другой информации о нём.
Как видно, предлагаемый для посадки ЛА на астероид частотный способ радиодальнометрии заключается в выделении биений одной и той же частоты Fбi=2ДiFмifд/С, сформированных после смешивания, излученного и принятых от астероида ЛЧМ сигналов, при дискретных увеличениях частоты Fмi модуляции ЛЧМ сигнала, проводимых после каждого обнаружения астероида на заданных удалениях Дi от ЛА. Соответствующие увеличиваемым частотам Fмi удаления Дi, уменьшаемые с целью обнаружения астероида на всё более близких и близких удалениях от ЛА. Что позволяет сократить расстояния между объектами до размеров, при которых можно осуществить их стыковку, используя для этого предлагаемый частотный способ радиопеленгации. Причем, при данном способе, для определения направлений и величин отклонений астероида от ЛА, по крайней мере, в одной плоскости, необходимо иметь приемопередающую антенну <О>, излучающую ЛЧМ сигнал и расположенные по обе её стороны, на равных удалениях ОА=ОВ, на одной линии АОВ, приемные антенны <А> и <В>, принимающие отражения от астероида, при смешивании которых с излученным сигналом формируют три биения с частотами:
Fбо=2ОЦFмfд/С-Fд, FбА=(ОЦ+ОА+АЦ)Fмfд/С-Fд и FбВ=(ОЦ+ОВ+ВЦ)Fмfд/С-Fд,
где: Fм – частота модуляции, а fд – девиация частоты f ЛЧМ сигнала; Fд – частота Доплера; АЦ, ВЦ и ОЦ – расстояниях между антеннами и астероидом, находящимся в точке Ц пространства, выделяемые полосовыми фильтрами. При этом: после смешивания биений с частотами: FбА с FбО и FбВ с FбО; выделения двух разностных сигналов с частотами: FбА-FбО и FбВ-FбО и измерения их величин; вычисления величин разностей FбА-FбВ разностных частот и определения знаков разностей, определяют направления и величины отклонений ЛА от астероида, с целью их сведения к нулю и осуществления стыковки объектов.
Определить, например, выбранное максимальное расстояние Д1 между объектами, когда надо начинать процесс сближения между ними, можно также и иным частотным способом радиодальнометрии, при использовании частоты Fм модуляции ЛЧМ сигнала гораздо выше частоты модуляции, определяющей однозначное определение дальности до цели и при котором необходимо. Выделить и обнаружить сигнал биений с частотой Fбi=2ДiFмifдi/С, а также сформировать метку времени при постоянных параметрах ЛЧМ сигнала. После чего, через время tз=fi/gi после формирования метки времени и расстоянии между объектами Дi+Vitз, а также при их сближении со скоростью Vi, биение с частотой Fб1 смешать с сигналом биений с частотой Fбi – Fдi, сформированным на данный момент времени. И после этого выделить сигнал с частотой Fдi Доплера, величине которой, при постоянстве и знании скорости одного из сближающихся объектов, например, скорости VА астероида, будет соответствовать величина расстояния Дх=(СFдi-2VАf)2g между объектами, вычисленная заранее и момент определения которой будет соответствовать началу процесса сближения объектов. Очевидно, что при данном способе радиодальнометрии поставленная задача решается при Дi<<Д1. Т. е. при однозначном определении дальности Дi=С/2FМi гораздо меньшем однозначного определении дальности Д1=С/2FМ1. При необходимости, для решения аналогичных задач и использовании базы данных о тех, или иных, заданных дальностях, хранимых в ППЗУ, можно воспользоваться данным частотным способом радиодальнометрии, позволяющим, при проектировании частотной РЛС, выбирать параметры излучаемого сигнала варьируя не только величинами: f, Fм, fд и g ЛЧМ сигнала, но и отношением Fм/Fммin. Т. е. проводить проектирование при больших объемах имеющейся информации, а значит производить более качественную и универсальную продукцию.
Провести стыковку ЛА с астероидом можно, если при заданном расстоянии Д1 между сближающимися со скоростью Vi объектами, выделить, пораздельно, при времени С/2Fм=t1+t2, два биения. Сначала первое, в течении времени С/2Fм-t2, фиг.5, с частотой Fб1=fд2Д12Fм/С-2Vif/С, которое задерживают на время tлз<t1. Затем второе, в течении времени t1, с частотой, Fб2=2fд[(С/2Fм)-Д1]2Fм/С-2Vif/С=2fд-Fб1-2Vif/С. И после смешивания биений с частотами Fб1 и Fб2 сформировать разностный сигнал с известной частотой FбР=2fд-2Fб1, независящий от частоты Доплера, факт возникновения которого, после его выделения и обнаружения, будет свидетельствовать о том, что между объектами заданное расстояние Д1, позволяющеее проводить стыковку объектов, при минимально заданной скорости Vmin их сближения. А скорость Vmin можно определить, после обнаружения сигнала с частотой FбР, посредством определения: возникают ли на РЛС сигналы биения с частотами Fб11=fд2Д12Fм/С и Fб12=2fд-Fб1. Т. е. при Vi близкой к нулю. И если данные биения формируются на РЛС, выделяются и обнаруживаются, то считают, что объекты сближаются с допустимой для стыковки объектов скоростью. А если нет, при большей допустимой скорости сближения, то импульсно, при необходимости многократно, замедляют движение ЛА, до момента возникновения сигналов с частотами Fб11 и Fб12, при очередном возникновении разностного сигнала с частотой FбР.