
(Статья может редактироваться со временем при появлении новой информации)
Продолжение статьи № 25
G01S3/46
Изобретения относятся к робототехнике и могут быть использованы при создании чувственных роботов способных ориентироваться в пространстве и обходить препятствия, а также ощущать и реагировать на возникающую опасность.
Человек обладает зрением, слухом и осязанием, обонянием и вкусом, а также другими чувствами, вызывающими у него соответствующие ощущения: зрительные, слуховые и т.п. Так, например, кожа – орган осязания человека, определяющие его способность воспринимать прикосновение, боль, тепло, холод. Кожа позволяет человеку узнать многое о предметах, которые его окружают. На ощупь можно определить форму и размеры предмета, узнать гладкий предмет или шершавый, холодный или теплый. Кожа предупреждает нас об опасности. Если прикоснуться к горячему предмету. То рука тут же отдергивается. Кожа мгновенно подаёт сигнал: берегись, горячо. А на морозе она подсказывает: очень холодно, не отморозь пальцы!
А человеческий орган глаз позволяет человеку ощутить (увидеть) окружающие его предметы, посредством восприятия отраженного предметами света, что вызывает у него различного рода чувства: красоты – определяемой, в частности, цветами предмета или страха - определяемым, в частности, габаритами, скоростью и направлением перемещения предмета и связанное с этим возникающее у человека чувство возможного столкновения с предметом, определяемым, в частности, расстоянием между объектами, относительной скоростью их сближения и реакцией человека – его способностью, за определенное время, принять решение по предотвращению столкновения – отклонению от предмета в нужном направлении. Очевидно, что с помощью только разового осязания предмета нельзя определить нужного направления отклонения от него, необходимо, по крайней мере, два осязания, разделенные во времени. Или же это можно сделать с помощью ощущения одного и того же источника ощущений двумя приемниками ощущений, разделенными расстоянием. Так, как это делает человек или животное, с помощью зрительного или слухового ощущения одного и того же предмета - источника отраженного света, или источника звука, органами зрения или слуха, содержащими разделенные расстоянием два глаза или два уха.
По определению [4]: <<Ощущения человека есть явление жизнедеятельности человека постольку, поскольку они являются отражением явлений внешнего мира, природы тех форм вещества и форм действующей материи, воздействие которых на органы чувств необходимо порождает ощущения в человеческом мозгу>>, Явления вызывающие соответствующую реакцию человеческого организма на их появление.
Известны [5] роботы с числовым программным управлением (ЧПУ), которые могут производить операции по заданной программе без непосредственного участия человека. Однако интереснее было бы, если он делал что-то без указаний (программы)
Так, например, если бы произвольно перемещающегося робота с его комфортным состоянием – находиться в движении, поместили бы в темной комнате с дверью и он, дойдя до стены, которая может его остановить и вывести из комфортного состояния, в качестве защиты своего комфортного состояния, наощупь, по стене, дошёл бы до двери, вышел в неё и вне комнаты встретился бы с приближающемся к нему предметом и принял решение защитится от него или проигнорировал бы его появление, то, очевидно, такого робота можно было бы назвать чувственным (на ощупь принявшим решение – отвернуть от стены), думающим (принявшим решение – защищаться или нет) и соображающим (принявшим решение – защищаться, при больших габаритах и скоростях перемещения препятствий, посредством отвертывания от стены, потолка или большого камня лежащего на его пути, в направлении где их нет, т. е., соответственно, посредством отвертывания в сторону, нагибания, или, например, подпрыгивания, или игнорирования появление препятствий, при их малых габаритах и скоростях перемещения и неточном приближении к роботу, с промахом).
Известен [1] частотный метод радиолокации позволяющий, в случае модуляции излучаемого радиосигнала по закону симметричной треугольной кривой, раздельно мерить расстояния до цели и скорость её движения. Очевидно, что устройство реализующее данный метод измерения расстояний до цели и её скорость можно назвать роботом, который, по крайней мере: обнаружение цели воспримет как возникновение опасности и необходимости в её устранении; измеренные дальность и скорость – как необходимость определения момента осуществления защиты и выбора её метода, пассивного – уход от соприкосновения с целью, или активного – устранение цели. Однако данного робота, наверное, нельзя назвать рационально сделанным, хотя бы по тому, что он все сказанное делает постоянно, собирая информацию со всего объема пространства его окружающего, которая в значительной мере может быть избыточной. Другое дело, если необходимую информацию собирать и реагировать на неё в ограниченном объеме пространства, окружающем робота, как это делает человеческая кожа, заставляя человека ощущать – чувствовать прикосновения, тепло, холод и т. п. Кроме того, знания только расстояния до цели и её скорости, очевидно, недостаточно для обеспечения жизнедеятельности робота. Желательно, по крайней мере, ему уметь: определять габариты цели; ориентироваться в пространстве; обходить препятствия; приходить в место своего предписания и т. п.
Цель изобретения – с минимальными затратами, создание жизнедеятельного чувственного робота способного реагировать на препятствия и принимать решения по их преодолению.
Поставленная цель достигается за счёт использования устройств всего лишь частотной радиолокации и способов реализованных с их помощью, наделяющих робота способностями: обнаруживать препятствия и ориентироваться по ним в пространстве; в зависимости от обстоятельств, обходить, игнорировать или устранять возникающие препятствия; определять и приходить в место своего предписания; определять радиальные и линейные скорости целей, габариты, вероятность столкновения с препятствием; охранять границы своей жизнедеятельности; определять способы защиты, активный или пассивный, в случае возникновения опасности и выбирать, из совокупности имеющихся, необходимый инструмент защиты; определять местонахождение препятствий в пространстве и т.п.
На фигурах: 1а,б,в; 2; ...;18; 19а,б,в,г,д,е,ж,з; 20; ...; 27; 28а,б,в,г,д,е,ж,з; 29; ...; 34 приведены, соответственно, блок схемы: устройств определения знака и величины разности двух частот (УОЗВРДЧ); устройства формирования взаимно независимых разностных сигналов (УФВНРС2); устройств формирования метки времени (УФМВ); рисунок расположения радиолокационной системы посадки самолетов (РСП) на аэродром и таблицы для пояснения её работы; устройства формирования доплеровских разностных сигналов (УФДРС); устройства формирования узкополосных разностных сигналов (УФУРС); передатчиков ЛЧМ сигналов с дискретно изменяемой скоростью частоты (ПД); устройства измерения частоты сигнала (УИЧС); устройства измерения радиальной скорости цели (УИРСЦ); устройства определения направления перемещения цели (УОНПЦ); устройства определения габаритов цели (УОГЦ); устройств определения промаха цели (УОПРЦ); устройства определения диапазонов скоростей целей (УОДС); устройство выбора направления отклонения робота при его приводе к месту (маяку) предписания (УВНОРПМ); устройства определения октанты с целью (УООЦАВМДЕЛ); устройства определения части октанты с целью(УОЧОЦi); устройства выбора направления отклонения робота от препятствия (УВНОРП); устройства чувственного робота; устройства выбора средства защиты (УВСЗ); устройства направления средства защиты на цель (УНСЗЦ); устройства формирования сигналов обеспечивающих жизнедеятельность робота (УФСОЖР); устройства формирования информации обеспечения жизнедеятельности робота (УФИОЖР); шифратора ШАВМДЕЛ; УФВНРС3; шифраторов Шi; УФВНРС1; устройство определения местоположения цели в пространстве (УОМЦП1); УОМЦП2; УОМЦП3; устройство определения линейной скорости цели (УОЛСЦ); структурная схема для определения единства изобретения.
УОЗВРДЧ (фиг.1а) содержит входные шины Хi и Хj, при этом шина Хi, через последовательно соединенные элемент И1 (И) и счетчик 2 импульсов (СЧ), подключена к первому входу схемы 3 вычитания (СВ), или цифрового компаратора (ЦК), и шина Хj, через последовательно соединенные И4 и СЧ5, подключена к второму входу СВ3, а вторые входы И1 и И4 объединены и подключены к выходу генератора 6 счетных импульсов (ГСИ) и выходы СВ3(ЦК3) подключены, соответственно, к выходным шинам Хi>Хj,Хi<Хj,Хij
УОЗВРДЧ (фиг.1б) содержит входные шины Хi и Хj, при этом шина Хi, через последовательно соединенные селектор 1 импульсов по а.с.№1083355 (СЕЛ) и элемент ИЛИ2 (ИЛИ), подключена к первому входу фазового детектора 3 с запоминанием знака (ФДЗ) и шина Хj, через последовательно соединенные СЕЛ4 и ИЛИ5, подключена к второму входу ФДЗ3, а выходы ФДЗ3 подключены к выходным шинам Хi>Хj и Хi<Хj и через ИЛИ6, к выходной шине Хij.
УОЗВРДЧ (фиг.1в) содержит входные шины Хi и Хj, при этом шина Хi, через последовательно соединенные СЧ1 и дешифратор 2 (ДШ), подключена к первому входу ФДЗ3 и шина Хj, через последовательно соединенные СЧ4 и ДШ5, подключена к второму входу ФДЗ3, а выходы ФДЗ3 подключены, соответственно, к выходным шинам Хi>Хj и Хi<Хj и через ИЛИ6, к выходной шине Хij.
УФМВ (фиг.3) содержит последовательно соединенные: входную шину Х; элемент И9, счетчик 10 импульсов (СЧ) с вторым входом подключенным к выходу дешифратора 6 (ДШ); цифровой компаратор 11 (ЦК) с вторыми входами подключенными к шине установки кода Х1; элемент И12 с вторым входом подключенным к выходу элемента НЕ7; регистр 8 сдвига (РГ); выходную шину Y, а также последовательно соединенные: генератор 1 счетных импульсов (ГСИ); СЧ4; ДШ2 с входом объединенным с входами ДШ5 и ДШ6; триггер 3 (ТР) с вторым входом подключенным к выходу ДШ5, и выходом подключенным к второму входу элемента И9 и входу элемента НЕ7.
УФМВ (фиг.4) содержит последовательно соединенные: входную шину Х; элемент И2 с вторым входом подключенным, через линию 1 задержки (ЛЗ), к входной шине Х; селектор 3 импульсов (СЕЛ) по а.с. №1083355; РГ; выходную шину Y.
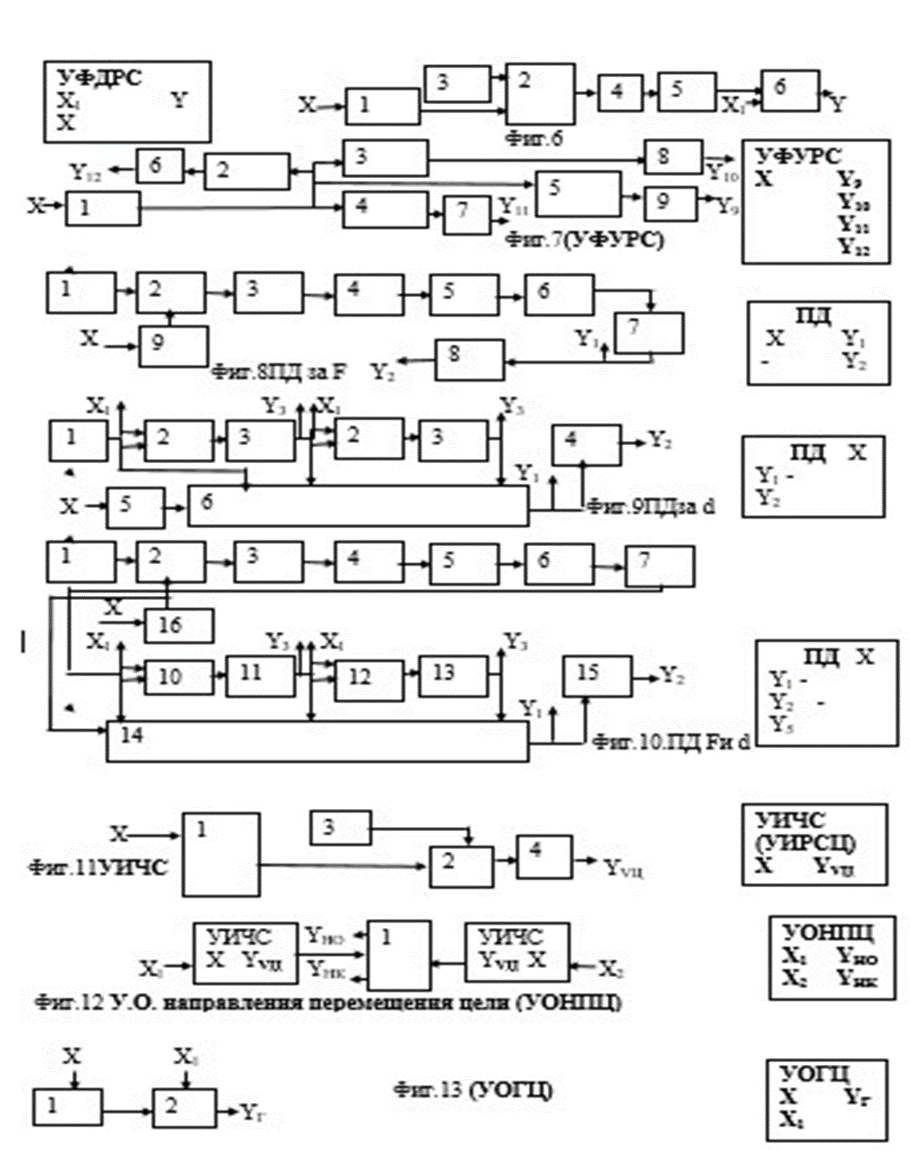
УФДРС (фиг.6) содержит фильтр 1 сигналов биений (ФСБ) с входной шиной Х, выход которого подключен к выходной шине Y через последовательно соединенные: ССМ2, с вторым входом подключенным к выходу гетеродина 3; фильтр 4 доплеровских разностных частот (ФДРЧ); преобразователь 5 гармонических сигналов в видеоимпульсы (ПР); элемент И6 с вторым входом подключенным к шине Х1.
УФУРС (фиг.7) содержит ФСБ1 с входной шиной Х, выход которого подключен к входам, соответственно, узкополосных фильтров 2, 3, 4 и 5 разностных частот (УФРЧ), выходы которых подключены через, соответственно, ПР 6, 8, 7 и 9 к, соответственно, выходным шинам: Y12; Y10; Y11; Y9.
ПД (фиг.8) содержит последовательно соединенные: блок эталонных напряжений (БЭН1); управляемый электронный ключ (УЭК2), с входами управления подключенными, через СЧ9, к входной шине Х; генератор управляемый напряжением (ГУН3); ПР4; СЧ5; цифроаналоговый преобразователь (ЦАП6); ГУН7, с выходом подключенным к выходной шине Y1; усилитель мощности (УМ8); выходную шину Y2.
ПД (фиг.9), содержит N последовательно соединенных ячеек, каждая из которых содержит последовательно соединенные: входную шину Х1; низкочастотный смеситель (СМ2) с объединенными входами; фильтр суммарной частоты (ФСЧ3); выходную шину Y3, при этом, вход первой ячейки подключен к выходу ГУН1 и одному из входов УЭК6, а выходы ячеек подключены, каждый к одному из оставшихся входов УЭК6, входы управления которого подключены, через СЧ5, к входной шине Х, а выход - к выходной шине Y1 и, через УМ4, к выходной шине Y2.
ПД (фиг.10) содержит последовательно соединенные: БЭН1; УЭК2 с входами управления подключенными, через второй СЧ8, к входной шине Х; ГУН3; ПР4; СЧ5; ЦАП6; ГУН7, а также N последовательно соединенных ячеек, каждая из которых содержит последовательно соединенные: входную шину Х1; СМ9 с объединенными входами; ФСЧ10; выходную шину Y3, при этом, вход первой ячейки подключен к выходу ГУН7 и одному из входов УЭК12, а выходы ячеек подключены, каждый к одному из оставшихся входов УЭК12, входы управления которого подключены к выходам СЧ8, а выход - к выходной шине Y1 и через УМ11 к выходной шине Y2
УИЧС и УИРСЦ (фиг.11) содержит последовательно соединенные: входную шину Х; РГ1; И2 с вторым входом подключенным к выходу ГСИ3; СЧ4 и шину YVЦ.
УОНПЦ (фиг.12) содержит фазовый детектор 1 с запоминанием знака (ФДЗ) с выходами, подключенными к выходным шинам YНО и YНК и входами – к выходным шинам YVЦ, соответственно, первого и второго УИЧС, входы Х которых подключены, соответственно, к входным шинам Х1 и Х2.
УОГЦ (фиг.13) содержит последовательно соединенные: входную шину Х; интегратор 1 (ИНТ); аналоговый компаратор 2 (АК) с шиной Х1 и выходную шину YГ.
УОПРЦ (фиг.14) содержит последовательно соединенные: входную шину Х1; УИЧС с выходом подключенным также к выходной шине YVЦ1; делитель 3 (ДЛ); ЦК4 с вторым входом подключенным к входной шине Х3, и выходную шину Yпр, а также второе УИЧС с входной шиной Х2 и выходом подключенным к второму входу ДЛ3 и выходной шине YVЦ2.
УОПРЦ (фиг.15) содержит последовательно соединенные: УФМВ; ТР2; элемент И3 с вторым входом подключенным к ГСИ4; СЧ5; ЦК6 с вторыми входами подключенными к входной шине Х и выходную шину Yпр.
УОДС (фиг.16) содержит последовательно соединенные: входную шину Х; УИЧС; ЦК2 с вторыми входами подключенными к входной шине Х1; элемент И4; выходную шину YVC, а также вход ЦК2, через ЦК3 с вторыми входами подключенными к входной шине Х2, подключен к второму входу элемента И4 и выходной шине YVМ, а выходная шина YVБ подключена к первому входу элемента И4.
УВНОРПМ (фиг.17) содержит входной разъём Zвх2, контакты которого: NАС>NВС; NАС<NВС; NЕС>NЛС; NЕС<NЛС; NМС>NДС; NМС<NДСподключены, через, соответственно: элементы И1, 2, 3, 4, 5 и 6 к входам, соответственно, исполнительных устройств 7, 8, 9, 10, 11 и 12 (ИУ), а контакт Zвх2: YVМ, через элемент И13, с вторым входом подключенным к контакту Х разъема Zвх2, подключены к вторым входам элементов И1, 2, 3, 4, 5 и 6, выходы которых подключены также: И1, через 1ЫЙ интегратор 14 (ИНТ) и элемент И15 - к ИУ16; И2, через ИНТ17, к второму входу элемента И15; И3, через ИНТ18 и элемент И19 - к ИУ20; И4, через ИНТ21, к второму входу 9ОГО элемента И19; И5, через ИНТ22 и элемент И23 - к ИУ24; И6, через ИНТ25, к второму входу элемента И23, а третьи входы элементов И15, 19, 23 объединены и подключены к выходу аналогового компаратора 26 (АК), первый и второй входы которого подключены, соответственно, к входным шинам Х1 и Х2.
УООЦ (фиг.18) содержит входной разъём Zвх1 с контактами: NАС>NВС; NВС>NАС; NМС>NДС; NДС>NМС; NЕС>NЛС и NЛС>NЕС подключенными: NАС>NВС - к первым входам элементов И1, И4, И5, И8; NВС>NАС - к первым входам элементов И2, И3, И6, И7; NМС>NДС - к вторым входам элементов И1, И2, И3, И4; NДС>NМС – к вторым входам элементов И5, И6, И7, И8; NЕС>NЛС - к третьим входам элементов И1, И2, И5, И6; NЛС>NЕС- к третьим входам элементов И3, И4, И7, И8, а выходы элементов И1, И2, И3, И4, И5, И6, И7, И8 подключены, соответственно, к контактам:1АЯ; 2АЯ; 3ЬЯ; 4АЯ; 5АЯ; 6АЯ; 7АЯ; 8АЯ выходного разъема Zвых1
УОЧОЦ (фиг.19) содержит входной разъем Zвх2 с контактами: NЛС>NДС; NДС>NЛС; NВС>NДС; NДС>NВС; NЛС>NВС; NВС>NЛС; 1АЯ; 2АЯ; 3ЬЯ; 4АЯ; 5АЯ; 6АЯ; 7АЯ; 8АЯ подключенными: NЛС>NДС - к первым входам элементов И1, И2, И6; NДС>NЛС - к первым входам элементов И3, И4, И5; NВС>NДС - к вторым входам элементов И1, И5, И6; NДС>NВС – к вторым входам элементов И2, И3, И4; NЛС>NВС - к третьим входам элементов И1, И2, И3; NВС>NЛС- к третьим входам элементов И4, И5, И6; 1АЯ – к вторым входам элементов И49, И50, И51, И52, И53, И54; 2АЯ – к вторым входам элементов И7, И8, И9, И10, И11, И12; 3ЬЯ – к вторым входам элементов И13, И14, И15, И16, И17, И18; 4АЯ – к вторым входам элементов И19, И20, И21, И22, И23, И24; 5АЯ – к вторым входам элементов И25, И26, И27, И28, И29, И30; 6АЯ – к вторым входам элементов И31, И32, И33, И34, И35, И36; 7АЯ – к вторым входам элементов И37, И38, И39, И40, И41, И42; 8АЯ – к вторым входам элементов И43, И44, И45, И46, И47, И48, а выходы элементов И1, И2, И3, И4, И5, И6 подключены к первым входам, соответственно: И1 – к входам элементов И49, И7, И13, И19, И25, И31, И37, И43; И2 – к входам элементов И50, И8, И14, И20, И26, И32, И38, И44; И3 – к входам элементов И51, И9, И15, И21, И27, И33, И39, И45; И4 – к входам элементов И52, И10, И16, И22, И28, И34, И40, И46; И5 – к входам элементов И53, И11, И17, И23, И29, И35, И41, И47; И6 – к входам элементов И54, И12, И18, И24, И30, И36, И42, И48,
а выходы элементов И7, ........, И54 подключены к контактам выходного разъема Zвых2, соответственно: Y1; Y2; Y3; Y4; Y5; Y6; Y7; Y8; Y9; Y10; Y11; Y12; Y13; Y14; Y15; Y16; Y17; Y18; Y19; Y20; Y21; Y22; Y23; Y24; Y25; Y26; Y27; Y28; Y29; Y30; Y31; Y32; Y33; Y34; Y35; Y36; Y37; Y38; Y39; Y40; Y41; Y42; Y43; Y44; Y45; Y46; Y47; Y48.
УВНОРП (фиг.20) содержит входной разъём Zвх1, контакты которого: NАС>NВС; NАС<NВС; NЕС>NЛС; NЕС<NЛС; NМС>NДС; NМС<NДСподключены, через, соответственно: элементы И1, И2, И3, И4, И5, И6, к входам, соответственно: 1ОГО; 2 ОГО; 3 ЬЕГО; 4 ОГО; 5 ОГО и 6 ОГО исполнительных устройств, ИУ7, ИУ8, ИУ9, ИУ10, ИУ11, ИУ12, а контакты Zвх1: YVМ; YПР и YК, через элемент И13, с четвертым входом подключенным к контакту Х разъема Zвх1, подключены к вторым входам элементов: И1, И2, И3, И4, И5, И6
Чувственный робот (фиг.21) содержит устройства: формирования информации для обеспечения жизнедеятельности робота (УФИОЖР); выбора направления отклонения робота от препятствия (УВНОРП); выбора направления отклонения робота при его приводе к месту предписания (УВНОРПМ); выбора средства защиты (УВСЗ); направления средства защиты на цель (УНСЗЦ), при этом контакты: NАС>NВС; NАС<NАВ; NЕС>NЛС; NЕС<NЛС; NМС>NДС; NМС<NДС выходного разъема Zвых УФИОЖР подключены к одноимённым контактам входных разъёмов Zвх1, Zвх2 и Zвх3, соответственно: УВНОРП; УВНОРПМ; УНСЗЦ, а контакты: Y13; ......, Y60 разъема Zвых УФИОЖР подключены к одноимённым контактам входных разъёмов Zвх3 и Zвх4, соответственно, УНСЗЦ и УВСЗ и контакты: YVМ; YVС; YVБ; YПР; YК; YГМ; NАВ; NЕЛ разъема Zвых УФИОЖР подключены к одноимённым контактам входных разъёмов Zвх1, Zвх2, Zвх3 и Zвх4, соответственно: УВНОРП; УВНОРПМ; УНСЗЦ и УВСЗ и кроме того контакты YVМ и YГМ разъема Zвых УФИОЖР, через элемент И1, подключены к ИУ 2, а контакты YНО и YНК разъема Zвых УФИОЖР подключены к входам второго ИУ 3.
УВСЗ (фиг.22) содержит входной разъём Zвх4, контакты которого: Y1, ..., Y48подключены, через, соответственно: элементы И1;.....;И48 к входам, соответственно: ИУ49;.....;ИУ96, а контакты Zвх4: YVБ; YПР и YК, через элемент И97, с четвертым входом подключенным к контакту Х разъема Zвх4, подключены к вторым входам элементов И1,..... , И48.
УНСЗЦ (фиг.23) содержит входной разъём Zвх3, контакты которого: Y1, ..., Y48подключены, через, соответственно, элементы И1, ...,И48 к входам постоянного программируемого запоминающего устройства 54 (ППЗУ), выходы которого подключены к входам ИУ55, а контакты Zвх3: YVС; YПР и YК, через: элемент И53, с четвертым входом подключенным к контакту Х разъема Zвх3, подключены к вторым входам: элементов И1, ....., И52 а контакты разъёма Zвх3: NАС>NВС; NАС<NВС; NЕС>NЛС; NЕС<NЛС подключены, через, соответственно: элементы И49, ....., И52 к входам, соответственно, блоков БЭИ56, БЭИ57, БЭИ58, БЭИ59, элементов И (БЭИ), вторые входы которых подключены, соответственно: БЭИ56 и БЭИ57 – к контактам NАВразъёма Zвх3; БЭИ58, БЭИ59 – к контактам NЕЛразъёма Zвх3, а выходы БЭИ56, БЭИ57, БЭИ58, БЭИ59 подключены, соответственно, к входам 2ОГО; 3 ОГО; 4ОГО и 5 ОГО ИУ60, ИУ61, ИУ62 и ИУ63.
УФСОЖР (фиг.24) содержит ССМ, первый вход которого подключен к выходуYО, а второй к выходуY1 УФВНРС, а выход ССМ - к входам Х первого и второго УФДРС и УФУРС, при этом выходы УФУРС: Y9, через последовательно соединенные первое УФМВ и реле времени (РВ), подключен к выходной шине YК; Y10, через последовательно соединенные второе УФМВ и РВ2, подключен к выходной шине Y10 , входу Х1 УФВНРС и входу Х1 второго УФДРС, выход которого, шина Y, подключен к выходной шинеY7; Y11, через последовательно соединенные третье УФМВ и РВ3, подключен к входу Х1 первого УФДРС, выход которого, шина Y, подключен к выходной шинеY8; Y12, через последовательно соединенные четвертые УФМВ и РВ4, а также РГ5 и элемент ИЛИ6, подключен к входу Х УФВНРС и выходы УФВНРС: NЛС>NВС, NЛС<NВС, NЛВ, NЛС>NДС, NЛС<NДС, NЛД, NВС>NДС, NВС<NДС, NВД, NМС>NДС, NМС<NДС, NМД, NЕС>NЛС, NЕС<NЛС, NЕЛ, NАС>NВС, NАС<NВС, NАВ, подключены к одноименным выходным шинам УФСОЖР.
УФИСОЖР (фиг.25) содержит выходной разъём Zвых, а также УФСОЖР, выходы которого: YК и YVЦ подключены, соответственно, к контактам YК и YVЦ разъёма Zвых; Y7 - к входной шине Х2 УОПРЦ и входной шине Х2 УОНПЦ; Y8 - к входным шинам Х1 УОПРЦ и УОНПЦ и входной шине Х3 УОГЦ и входной шине Х УИРСЦ и входной шине Х УОДС и выходы УФСОЖР: NАС>NВС, NАС<NАВ и NАВ; NЕС>NЛС, NЕС<NЛС и NЕЛ; NМС>NДС, NМС<NДС и NМД; NВС>NДС, NВС<NДС и NВД; NЛС>NДС, NЛС<NДС и NЛД; NЛС>NВС, NЛС<NВС и NЛВ подключены к одноименным входам устройства определения октанты с целью (УООЦ) и устройства определения части октанты с целью (УОЧОЦ), входы которого: 1АЯ; 2АЯ; 3АЯ; 4АЯ; 5АЯ; 6АЯ; 7АЯ и 8АЯ подключены к одноименным выходам УООЦ и выходы УОЧОЦ: Y13; ......, Y60 подключены к одноимённым контактам Y13; ......, Y60 разъёма Zвых, также как и выходы УФСОЖР: NАС>NВС; NАС<NАВ; NАВ; NЕС>NЛС; NЕС<NЛС; NЕЛ; NМС>NДС; NМС<NДС подключены к одноимённым контактам: NАС>NВС; NАС<NАВ; NАВ; NЕС>NЛС; NЕС<NЛС; NЕЛ; NМС>NДС; NМС<NДС разъёма Zвых, а выходы: УОДС; УИРСЦ; УОГЦ; УОПРЦ, соответственно: YVБ; YVС; YVМ; YVЦ; YГ и YПР, подключены к одноимённым контактам: YVБ; YVС; YVМ; YVЦ; YГ и YПР разъёма Zвых.
УОЛСЦ (фиг.33) содержит УОПРЦ по п.17, выходы YVЦ1 и YVЦ2которого, через, соответственно, ДШ1 и ДШ2 подключены к входам установки ТР3 в 0 и 1, выход которого подключен к первому входу элемента И5, второй вход которого подключен к выходу ГСИ4, а выход, через СЧ6, к выходной шине YVЛ и выход YПР УОПРЦ подключен к одноименной выходной шине YПР.
УОМЦП3 (фиг.32) содержит УОМЦП2 и УФВНРС3, выходы которого подключены к одноименным входам УООЦАВМДЕЛ и одноименным входам: УОЧОЦЛМВ; УОЧОЦЛМА; УОЧОЦЛДА; УОЧОЦЛДВ; УОЧОЦЕМВ; УОЧОЦЕМА; УОЧОЦЕДА; УОЧОЦЕДВ, выходы которых являются выходами УОМЦП3 подключенными, соответственно, к выходным шинам: Y1, ...,Y48, а выходы УОМЦП2:1АЯ;2АЯ;3АЯ;4АЯ;5АЯ;6АЯ;7АЯ;8АЯ подключены к четвёртым входам элементов И в, соответственно: УОЧОЦЛМВ; УОЧОЦЛМА; УОЧОЦЛДА; УОЧОЦЛДВ; УОЧОЦЕМВ; УОЧОЦЕМА; УОЧОЦЕДА; УОЧОЦЕДВ.
УОМЦП2 (фиг.31) содержит УФВНРС2, выходы которого подключены к одноименным входам УООЦАВМДЕЛ и УОЧОЦЛДВ, выходы которого являются выходами УОМЦП2, а также выход 4АЯ УООЦАВМДЕЛ подключен к четвёртым входам элементов И в УОЧОЦЛДВ.
УОМЦП1 (фиг.30) содержит УФВНРС1, выходы которого подключены к одноименным входам УООЦАВМДЕЛ, выходы которого являются выходами УОМЦП1.
УОЧОЦЛМВ (фиг.19а) содержит входной разъем Zвх1 с контактами: NЛС>NМС; NМС>NЛС; NЛС>NВС; NВС>NЛС; NВС>NМС; NМС>NВС; 1АЯ подключенными: NЛС>NМС - к первым входам элементов И (И1, И2, И6); NМС>NЛС - к первым входам И3, И4, И5; NЛС>NВС - к вторым входам И1, И5, И6; NВС>NЛС – к вторым входам И2, И3, И4; NВС>NМС – к третьим входам И1, И2, И3; NМС>NВС- к третьим входам И4, И5, И6; 1АЯ – к четвертым входам И1, И2, И3 И4, И5, И6, выходы которых подключены к контактам: Y1; Y2; Y3; Y4; Y5; Y6 выходного разъёма Zвых1
УОЧОЦЛАМ (фиг.19б) содержит входной разъем Zвх2 с контактами: NАС>NЛС; NЛС>NАС; NМС>NАС; NАС>NМС; NМС>NЛС; NЛС>NМС; 2АЯ подключенными: NАС>NЛС - к первым входам И1, И2, И6; NЛС>NАС - к первым входам И3, И4, И5; NМС>NАС - к вторым входам И1, И5, И6; NАС>NМС – к вторым входам И2, И3, И4; NМС>NЛС – к третьим входам И1, И2, И3; NЛС>NМС- к третьим входам И4, И5, И6; 2АЯ – к четвертым входам И1, И2, И3 И4, И5, И6, выходы которых подключены к контактам: Y7; Y8; Y9; Y10; Y11; Y12 выходного разъёма Zвых2
УОЧОЦЛДА (фиг.19в) содержит входной разъем Zвх3 с контактами: NАС>NЛС; NЛС>NАС; NДС>NАС; NАС>NДС; NДС>NЛС; NЛС>NДС; 3ЬЯ подключенными: NАС>NЛС - к первым входам И1, И2, И6; NЛС>NАС - к первым входам И3, И4, И5; NДС>NАС - к вторым входам И1, И5, И6; NАС>NДС – к вторым входам И2, И3, И4; NДС>NЛС – к третьим входам И1, И2, И3; NЛС>NДС- к третьим входам И4, И5, И6; 3ЬЯ – к четвертым входам И1, И2, И3 И4, И5, И6, выходы которых подключены к контактам:Y13;Y14;Y15;Y16;Y17;Y18; выходного разъёма Zвых3
УОЧОЦЛДВ (фиг.19г) содержит входной разъем Zвх4 с контактами: NЛС>NДС; NДС>NЛС; NЛС>NВС; NВС>NЛС; NВС>NДС; NДС>NВС; 4АЯ подключенными: NЛС>NДС - к первым входам И1, И2, И6; NДС>NЛС - к первым входам И3, И4, И5; NЛС>NВС - к вторым входам И1, И5, И6; NВС>NЛС – к вторым входам И2, И3, И4; NВС>NДС – к третьим входам И1, И2, И3; NДС>NВС- к третьим входам И4, И5, И6; 4АЯ – к четвертым входам И1, И2, И3, И4, И5, И6, выходы которых подключены к контактам:Y19; Y20; Y21; Y22; Y23; Y24 выходного разъёма Zвых4
УОЧОЦЕМВ (фиг.19д) содержит входной разъем Zвх5 с контактами: NЕС>NМС; NМС>NЕС; NЕС>NВС; NВС>NЕС; NВС>NМС; NМС>NВС; 5АЯ подключенными: NЕС>NМС - к первым входам И1, И2, И6; NМС>NЕС - к первым входам И3, И4, И5; NЕС>NВС - к вторым входам И1, И5, И6; NВС>NЕС – к вторым входам И2, И3, И4; NВС>NМС – к третьим входам И1, И2, И3; NМС>NВС- к третьим входам И4, И5, И6; 5АЯ – к четвертым входам И1, И2, И3, И4, И5, И6, выходы которых подключены к контактам: Y25; Y26; Y27; Y28; Y29; Y30 выходного разъёма Zвых5
УОЧОЦЕАМ (фиг.19е) содержит входной разъем Zвх6 с контактами: NАС>NЕС; NЕС>NАС; NМС>NАС; NАС>NМС; NМС>NЕС; NЕС>NМС; 6АЯ подключенными: NАС>NЕС - к первым входам И1, И2, И6; NЕС>NАС - к первым входам И3, И4, И5; NМС>NАС - к вторым входам И1, И5, И6; NАС>NМС – к вторым входам И2, И3, И4; NМС>NЕС – к третьим входам И1, И2, И3; NЕС>NМС- к третьим входам И4, И5, И6; 6АЯ – к четвертым входам И1, И2, И3, И4, И5, И6, выходы которых подключены к контактам: Y31; Y32; Y33; Y34; Y35; Y36 выходного разъёма Zвых6
УОЧОЦЕДА (фиг.19ж) содержит входной разъем Zвх7 с контактами: NАС>NЕС; NЕС>NАС; NДС>NАС; NАС>NДС; NДС>NЕС; NЕС>NДС; 7АЯ подключенными: NАС>NЕС - к первым входам И1, И2, И6; NЕС>NАС - к первым входам И3, И4, И5; NДС>NАС - к вторым входам И1, И5, И6; NАС>NДС – к вторым входам И2, И3, И4; NДС>NЕС – к третьим входам И1, И2, И3; NЕС>NДС- к третьим входам И4, И5, И6; 7АЯ – к четвертым входам И1, И2, И3, И4, И5, И6, выходы которых подключены к контактам:Y37;Y38;Y39;Y40;Y41;Y42; выходного разъёма Zвых7
УОЧОЦЕДВ (фиг.19з) содержит входной разъем Zвх8 с контактами: NЕС>NДС; NДС>NЕС; NВС>NДС; NДС>NВС; NЕС>NВС; NВС>NЕС; 8АЯ подключенными: NЕС>NДС - к первым входам И1, И2, И6; NДС>NЕС - к первым входам И3, И4, И5; NВС>NДС - к третьим входам И1, И2, И3; NДС>NВС – к третьим входам И4, И5, И6; NЕС>NВС - к вторым входам И1, И5, И6; NВС>NЛС- к вторым входам И2, И3, И4; 8АЯ – к четвертым входам И1, И2, И3, И4, И5, И6, выходы которых подключены к контактам: Y43;Y44;Y45;Y46;Y47;Y48; выходного разъёма Zвых9
УФВНРС2 (фиг.2) содержит приемопередающую антенну <О>, вход которой работающий на передачу подключен к мощному выходу Y2 передатчика (ПД) с входом управления подключенным к входной шине Х, а выход антенны <О>, работающий на прием, подключен к выходной шине YО, а также шесть приемных антенн: <А>; <В>; <Е>; <Л>; <М> и <Д>, выходы которых подключены у: <А>, через последовательно соединённые: ССМ1, фильтр 7 разностных частот (ФРЧ), преобразователь 13 гармонического сигнала в видеоимпульсы (ПРА) и элемент И19, к контакту входного разъёма Zвх (входу NАС) шифратора ШАВМДЕЛ; <В>, через последовательно соединённые: ССМ2, ФРЧ8, ПРВ14 и элемент И20, к входам NВС шифраторов ШАВМДЕЛ и ШЛДВ; <Е>, через последовательно соединённые: ССМ3, ФРЧ9, ПРЕ15 и элемент И21, к входу NЕС шифратора ШАВМДЕЛ; <Л>, через последовательно соединённые: ССМ4, ФРЧ10, ПРЛ16 и элемент И22, к входам NЛС шифраторов ШАВМДЕЛ и ШЛДВ; <М>, через последовательно соединённые: ССМ5, ФРЧ11, ПРМ17 и элемент И23, к входу NМС шифратора ШАВМДЕЛ; <Д>, через последовательно соединённые : ССМ6, ФРЧ12, ПРД18 и элемент И24, к входам NДС шифраторов ШАВМДЕЛ и ШЛДВ, при этом выходы шифратора ШАВМДЕЛ: NАС>NВС, NАС<NВС, NАВ, NЕС>NЛС, NЕС<NЛС, NЕЛ, NМС>NДС, NМС<NДС, NМД подключены к одноименным выходным шинам (выходам) УФВНРС, а выходы шифратора ШЛДВ: NЛС>NДС, NЛС<NДС, NЛД, NЛС>NВС, NЛС<NВС, NЛВ, NВС>NДС, NВС<NДС, NВД подключены к одноименным выходам УФВНРС2, а также вторые входы всех ССМ объединены и подключены к выходной шине Y1 ПД и вторые входы всех элементов И объединены и подключены к входной шине Х1.
УФВНРС3 (фиг.27) содержит УФВНРС2 и дополнительно: ШВЕД; ШАЕД; ШАЛД; ШЛМВ; ШВЕМ; ШАЕМ; ШАЛМ, входы которых подключены к выходам элементов И (И) УФВНРС2, а именно: входы NВС, NЕС, NДС, ШВЕД, к выходам, соответственно, 20ОГО, 21ОГО и 24ОГО И; входы NАС, NЕС, NДС, ШАЕД, к выходам, соответственно, 19ОГО, 21ОГО и 24ОГО И; входы NАС, NЛС, NДС, ШАЛД, к выходам, соответственно, 19ОГО, 22ОГО и 24ОГО И; входы NЛС, NМС, NВС, ШЛМВ, к выходам, соответственно, 22ОГО, 23ОГО и 20ОГО И; входы NВС, NЕС, NМС, ШВЕМ, к выходам, соответственно, 20ОГО, 21ОГО и 23ОГО И; входы NАС, NЕС, NМС, ШАЕМ, к выходам, соответственно, 19ОГО, 21ОГО и 23ОГО И; входы NАС, NЛС, NМС, ШАЛМ, к выходам, соответственно, 19ОГО, 22ОГО и 23ОГО И, а выходы ШВЕД, ШАЕД, ШАЛД, ШЛМВ, ШВЕМ, ШАЕМ, ШАЛМ:NВС>NЕС, NВС<NЕС, NВЕ, NДС>NЕС, NДС<NЕС, NДЕ, NДС>NВС, NДС<NВС, NДВ у ШВЕД; NАС>NЕС, NАС<NЕС, NАЕ, NДС>NЕС, NДС<NЕС, NДЕ, NДС>NАС, NДС<NАС, NДА у ШАЕД; NАС>NЛС, NАС<NЛС, NАЛ, NДС>NАС, NДС<NАС, NДА, NДС>NЛС, NДС<NЛС, NДЛ у ШАЛД; NЛС>NМС, NЛС<NМС, NЛМ, NЛС>NВС, NЛС<NВС, NЛВ, NВС>NМС, NВС<NМС, NВМ у ШЛМВ; NВС>NЕС, NВС<NЕС, NВЕ, NМС>NЕС, NМС<NЕС, NМЕ, NМС>NВС, NМС<NВС, NВМ у ШВЕМ; NАС>NЕС, NАС<NЕС, NАЕ, NМС>NЕС, NМС<NЕС, NМЕ, NМС>NАС, NМС<NАС, NМА у ШАЕМ; NАС>NЛС, NАС<NЛС, NАЛ, NМС>NАС, NМС<NАС, NМА, NМС>NЛС, NМС<NЛС, NМЛ у ШАЛМ подключены к одноименным выходам УФВНРС3.
Шифратор – ШАВМДЕЛ (фиг.26) содержитпервое, второе и третье УОЗВРДЧ, входы Xi которых подключены, соответственно, к контактам входного разъёма Zвх: NАС; NМС; NЕС, а входы Xjк, соответственно, контактам: NВС; NДС; NЛСвходного разъёма Zвх, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма, соответственно: NАС>NВС; NАС<NВС; NАВ; NМС>NДС; NМС<NДС; NМД; NЕС>NЛС; NЕС<NЛС; NЕЛ.
Шифратор – ШЛДВ (фиг.28а) содержитпервое, второе и третье УОЗВРДЧ, входы Xi которых подключены, соответственно, к контактам входного разъёма Zвх4: NЛС; NЛС; NВС, а входы Xjк, соответственно, контактам: NДС; NВС; NДСвходного разъёма, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма Zвых4, соответственно: NЛС>NДС; NЛС<NДС; NЛД; NЛС>NВС; NЛС<NВС; NЛВ; NВС>NДС; NВС<NДС; NВД.
Шифратор – ШВЕД (фиг.28б) содержитпервое, второе и третье УОЗВРДЧ, входы Xi которых подключены, соответственно, к контактам входного разъёма Zвх8: NВС; NДС; NДС, а входы Xjк, соответственно, контактам: NЕС; NЕС; NВСвходного разъёма, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма Zвых8, соответственно: NВС>NЕС; NВС<NЕС; NВЕ; NДС>NЕС; NДС<NЕС; NДЕ; NДС>NВС; NДС<NВС; NДВ.
Шифратор – ШАЕД (фиг.28в) содержитпервое, второе и третье УОЗВРДЧ, входы Xi которых подключены, соответственно, к контактам входного разъёма Zвх7: NАС; NДС; NДС, а входы Xjк, соответственно, контактам: NЕС; NЕС; NАСвходного разъёма, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма Zвых7, соответственно: NАС>NЕС; NАС<NЕС; NАЕ; NДС>NЕС; NДС<NЕС; NДЕ; NДС>NАС; NДС<NАС; NДА.
Шифратор – ШАЛД (фиг.28г) содержитпервое, второе и третье УОЗВРДЧ, входы Xi которых подключены, соответственно, к контактам входного разъёма Zвх3: NАС; NДС; NДС, а входы Xjк, соответственно, контактам: NЛС; NАС; NЛСвходного разъёма, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма Zвых3, соответственно: NАС>NЛС; NАС<NЛС; NАЛ; NДС>NАС; NДС<NАС; NДА; NДС>NЛС; NДС<NЛС; NДЛ.
Шифратор – ШЛМВ (фиг.28д) содержитпервое, второе и третье УОЗВРДЧ, входы Xi которых подключены, соответственно, к контактам входного разъёма Zвх1: NЛС; NЛС; NВС, а входы Xjк, соответственно, контактам: NМС; NВС; NМСвходного разъёма, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма Zвых1, соответственно: NЛС>NМС; NЛС<NМС; NЛМ; NЛС>NВС; NЛС<NВ; NЛВ; NВС>NМС; NВС<NМС; NВМ.
Шифратор – ШВЕМ (фиг.28е) содержит первое, второе и третье УОЗВРДЧ, входы Xiкоторых подключены, соответственно, к контактам входного разъёма Zвх5: NВС; NМС; NМС, а входы Xjк, соответственно, контактам: NЕС; NЕС; NВСвходного разъёма, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма Zвых5, соответственно: NВС>NЕС; NВС<NЕС; NВЕ; NМС>NЕС; NМС<NЕС; NМЕ; NМС>NВС; NМС<NВС; NВМ
Шифратор – ШАЕМ (фиг.28ж) содержит первое, второе и третье УОЗВРДЧ, входы Xiкоторых подключены, соответственно, к контактам входного разъёма Zвх6: NАС; NМС; NМС, а входы Xjк, соответственно, контактам: NЕС; NЕС; NАСвходного разъёма, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма Zвых6, соответственно: NАС>NЕС; NАС<NЕС; NАЕ; NМС>NЕС; NМС<NЕС; NМЕ; NМС>NАС; NМС<NАС; NМА
Шифратор – ШАЛМ (фиг.28з) содержитпервое, второе и третье УОЗВРДЧ, входы Xi которых подключены, соответственно, к контактам входного разъёма Zвх2: NАС; NМС; NМС, а входы Xjк, соответственно, контактам: NЛС; NАС; NЛСвходного разъёма, а выходы первого, второго и третьего УОЗВРДЧ подключены к контактам выходного разъёма Zвых2, соответственно: NАС>NЛС; NАС<NЛС; NАЛ; NМС>NАС; NМС<NАС; NМА; NМС>NЛС; NМС<NЛС; NМЛ
Для обеспечения жизнедеятельности чувственный робот (далее робот) способен, по крайней мере: выбрать направление отклонения от места своего предписания (маяка) и от встретившегося на пути препятствия, или организовать самозащиту от внезапно возникшей угрозы, с помощью, согласно структурной схемы (фиг.34), устройств: УВНОРПМ; УВНОРП; УНСЗЦ; УВСЗ и УФИОЖОР, последнее из которых формирует для этого информацию на основании данных обеспечиваемых устройствами: УОНПЦ; УОПРЦ; УОГЦ; УОДОС; УИРСЦ; УОЛСЦ; УОМЦП3 и УФСОЖР, последнее из которых формирует сигналы ( последовательности импульсов или логических 0 и 1 и т.п.) для обеспечения жизнедеятельности робота, на основании данных обеспечиваемых устройствами: УФДРС; УФУРС; четырьмя УФМВ и УФВНРС1, последнее из которых, с помощью ПД и ШАВМДЕЛ, формирует шифрованную информацию для, в том числе и: УФВНРС2 и УОМЦП1. И кроме того, для функционирования: УФВНРС2 используют ШЛДВ; УФВНРС3 используют УФВНРС2 и ШВЕД, ШАЕД, ШАЛД, ШЛМВ, ШВЕМ, ШАЕМ, ШАЛМ; УОМЦП3 используют УФВНРС3 и УОМЦП2; УОМЦП2 используют УФВНРС2, УОЧОЦЛДВ, УОМЦП1 и УООЦАВМДЕЛ; УОМЦП1 используют УООЦАВМДЕЛ; УОМЦП3 используют УОЧОЦВЕД, УОЧОЦАЕД, УОЧОЦАЛД, УОЧОЦЛМВ, УОЧОЦВЕМ, УОЧОЦАЕМ, УОЧОЦАЛМ. По структурной схеме можно установить, очевидно, соответствие предлагаемого к защите, требованиям единства изобретения, так как соблюдаются, согласно требованиям российского законодательства, следующие условия.
1. С помощью одних устройств производятся другие, например, УФИОЖОР с помощью УФСОЖР, или УФМВ может быть применено в качестве многоразовой мишени и т. п.
2. Одни изобретения помогают осуществиться другим, например, способ определения промаха с помощью УОПРЦ, или способ формирования ЛЧМ сигнала с помощью ПД, или УФВНРС с помощью Октанты и т.п.
3. Одни изобретения используются в других, например: УФМВ; УФДРС и УФУРС в УФСОЖР, или УФСОЖР в УФИСОЖР и т. п.
4. Изобретения, конечный результат у которых является одним, например, создание робота – неодушевленного объекта с функциями присущими одушевленным субъектам.
5. В заявке могут быть объединены и объединены на самом деле, целые комбинации изобретений, например, вокруг: УФСОЖР или УФИСОЖР; Октанты или УФМВ и т.п.
В международном законодательстве требование единства одно – группу изобретений должен объединять хотя бы один общий особый технический признак, который должен быть новым, т. е. о нём не должно быть публикаций ранее. В данном случае таким признаком может быть – реализация робота только с помощью способов и устройств присущих методу частотной радиолокации, или, применение Октанты – оригинальной антенной системы, для осуществления жизнедеятельности робота и т. п.
Рассмотрим работу чувственного робота – устройства умеющего самостоятельно ориентироваться в пространстве и ощущать опасность, созданное с применением способов и устройств, обеспечивающих его жизнедеятельность, относящихся к частотной радиолокации. Сразу отметим, что алгоритм существования робота заключается в формировании устройством УФСОЖР сигналов, обеспечивающих его жизнедеятельность, на основании которых другим устройством - УФИОЖР, формируется информация, позволяющая роботу выполнять вышеотмеченные функции, по крайней мере, информация о местоположении места предписания робота и предметов (целей) встречающихся на его пути перемещения, а также о: направлении перемещения цели; скорости цели; диапазоне скоростей цели; габаритах цели; возможности приближения цели к роботу с промахом (сближении объектов с промахом); о моментах организации защиты от нежелательных целей. А также отметим то, что робот не представляет собой монстра, созданного из набора видеокамер, программ обеспечения, навигаторов, каналов связи, и т. п., а всего лишь частотный радиолокатор с оригинальной антенной системой в виде Октанты. Октанты – фигуры сферической конфигурации, выполненной в виде трёх взаимно перпендикулярных жестких стержней равной длинны, АВ, ЕЛ и МД, с установленными на их концах одноименными приемными антеннами. Стержнями пересекающимися в точке О – середине стержней и Октанты, габариты которой зависят от предполагаемых расстояния между объектами (от дециметров, до десятков метров - при обеспечении роботом посадки самолетов с расстояния более 10км). Октанты, которая обладает свойствами (Ф., 44,45): измеренные величины расстояний до любой точки С пространства вокруг центра Октанты, АС и ВС, не зависят от перемещения точки С вокруг стержня АВ, также как и расстояния ЕС и ЛС от перемещения точки С вокруг стержня ЕЛ и расстояния МС и ДС от перемещения точки С вокруг стержня МД; сочетания из трех знаков разностей расстояний: АС>ВС или АС<ВС, ЕС>ЛС или ЕС<ЛС, МС>ДС или МС<ДС определяют однозначное нахождение точки С в конкретной октанте – 1/8 части сферы вокруг центра Октанты, а именно, например, при: АС>ВС, МС>ДС, ЕС>ЛС в первой, при ВС>АС, МС>ДС, ЕС>ЛС во второй и т.д., а сочетания из шести знаков разностей расстояний: АС>ВС или АС<ВС, ЕС>ЛС или ЕС<ЛС, МС>ДС или МС<ДС, ЛС>ДС или ДС>ЛС, ВС>ДС или ДС>ВС, ЛС>ВС или ВС>ЛС, АС>ДС или ДС>АС, АС>ЛС или ЛС>АС, ЕС>ДС или ДС>ЕС, ЕС>АС или АС>ЕС, ВС>ЕС или ЕС>ВС, ЛС>МС или МС>ЛС, ВС>МС или МС>ВС, АС>МС или МС>АС, ЕС>МС или МС>ЕС определяют однозначное нахождение точки С в конкретной – 1/48 части (под октанте) сферы вокруг центра Октанты, а именно, например, при АС>ВС, МС>ДС, ЕС>ЛС, ЛС>ДС, ВС>ДС, ЛС>ВС в первой, при АС>ВС, МС>ДС, ЕС>ЛС, ЛС>ДС, ДС>ВС, ЛС>ВС во второй и т. д. Очевидно, что используя отмеченные свойства Октанты, можно определять местоположение цели в пространстве, например, с помощью УОМЦП2 (фиг.31) содержащего УФВНРС2 (фиг.2) с УООЦАВМДЕЛ (фиг.18) и УОЧОЦЛДВ (фиг19г), которое в свою очередь включает: Октанту, выполненную по п.44 или п.45 формулы изобретения (Ф.,п.п.44,45); ПД (фиг.8,9,10); ШАВМДЕЛ (фиг.26) и ШЛДВ (фиг.28а).
Рассмотрим процесс определения местоположения цели в пространстве, в октанте - 1/8 и в под октанте - 1/48 части пространства вокруг излучателя ЛЧМ сигнала, при совместной работе отмеченных устройств. Для чего, оказывается, достаточно зашифровать, определенным образом, шифраторами ШАВМДЕЛ и ШЛДВ сигналы биений, соответствующие расстояниям от шести точек пространства, вокруг излучателя ЛЧМ сигнала, до цели. А затем, определенным образом, зашифрованную информацию расшифровать, с помощью УООЦАВМДЕЛ и УОЧОЦЛДВ. Рассмотрим более подробно процессы кодирования и декодирования информации о величинах взаимно независимых сигналов биений: FАС; FВС; FЕС; FЛС; FМС; FДС, формируемых на выходах ФРЧ7...12 УФВНРС2, после смешивания в ССМ1...6 излученных антенной <О> и принятых антеннами Октанты: <А>; <В>; <Е>; <Л>; <М>; <Д> отраженных от цели ЛЧМ сигналов, формируемых ПД. Сигналы биений, которые с помощью ПР13...18, преобразуют в последовательности видео импульсов с длительностью: КАС; КВС; КЕС; КЛС; КМС; КДС, равной половине периодов следования частот сигналов биений и пропускаемых элементами И19...24, через время tз=f/Fd после формирования предпоследней метки времени, в момент обнаружения цели на предпоследнем рубеже её подлёта к роботу. После чего видеоимпульсы поступают на входы шифраторов и преобразуются ими сначала в двоичные цифровые числа: NАС; NВС; NЕС; NЛС; NМС; NДС, а затем в потенциалы, в данном случае характеризующие знаки разности величин и ту или иную октанту и под октанту с целью: NАС>NВС; NАС<NВС; NЕС>NЛС; NЕС<NЛС; NМС>NДС; NМС<NДС; NЛС>NВС; NЛС<NВС; NЛС>NДС; NЛС<NДС; NВС>NДС; NВС<NДС, а также в двоичные цифровые числа в виде логических 1 и 0: NАВ; NМД; NЕЛ; NЛВ; NЛД; NВД, характеризующие разности величин. Все применяемые шифраторы представляют собой набор из трех УОЗВРДЧ (фиг.1а, 1б, 1в), величины цифровых чисел на выходах которых зависят от длительностей видеоимпульсов на их входах. Тогда, после подачи сформированных цифровых чисел на декодеры - УООЦАВМДЕЛ и УОЧОЦЛДВ, на их выходах будут сформированы десятичные цифровые числа, каждое из которых будет определять 1/8 или 1/48 часть пространства с целью, вокруг излучателя Октанты. Декодеры, работа которых охарактеризована (Ф.,п.п.77...85,44,45) и представляющие собой набор из 8МИ или 6ТИ многовходовых элементов И, высокий потенциал на одном из выходов которых может появиться только при определённом двоичном цифровом коде на входах элементов И, т. е. при определенном сочетании логических 1 и 0. Отметим, что УФВНРС1 и УФВНРС3, а также УОМЦП1 и УОМЦП3 работают аналогично вышеописанным УФВНРС2 и УОМЦП2.
В УФСОЖР (фиг.24), представляющем собой формирователь сигналов для обеспечения жизнедеятельности робота (последовательностей видеоимпульсов, импульсов, логических 0 и 1, высоких и низких потенциалов), помимо УФВНРС, входят четыре УФМВ (фиг.3,4), которые формируют, при заданных расстояниях между объектами отличных на величину Vitз, метки времени (импульс сигналы), где Vi – скорость сближения объектов, tз=fS/Сd - время, за которое, при параметрах: f; d и F ЛЧМ сигнала, свет проходит расстояние в f/d раз большее чем расстояние S=С/F – однозначного определения дальности. Метки времени, относительно моментов возникновения которых, робот начинает формировать для себя полезную информацию. А также входят: УФУРС (фиг.7) с четырьмя узкополосными фильтрами с полосами пропускания сигналов не зависящими от частот Доплера, формирующих последовательности видеоимпульсов; два УФДРС (фиг.6), которые совместно с двумя УФМВ позволяют одновременно иметь информацию о дальности и скорости цели, формирующие последовательности видеоимпульсов, следующих с частотами Доплера. А также входят последовательно соединенные: четвертое УФМВ, формирующее импульсы-метки времени при пересечении целью очередного заданного рубежа удаления от робота; РВ4, задерживающее метки времени на время формирования полезной информации для робота; РГ5 с выходами подключенными к входам элемента ИЛИ6, на выходе которого формируются импульсы, под действием которых ПД в УФВНРС изменяет скорость изменения частоты формируемого ЛЧМ сигнала. При этом УФСОЖР робота формирует, при нахождении цели на дальних подступах к роботу, несколько меток времени на выходе четвертого УФМВ, до момента обнаружения роботом цели в ближней зоне её обнаружения и формирования метки времени на выходе третьего УФМВ. При этом процесс изменения параметров ЛЧМ сигнала прекращается, но формирование сигналов обеспечения жизнедеятельности робота, с помощью УФМВ, УФУРС, УФДРС, работа которых будет описана ниже, продолжается. И это происходит после смены последовательного способа обнаружения цели, с помощью четвертого УФМВ, на параллельный, при котором, с помощью третьего, второго и первого УФМВ, формируют: информацию о нахождении цели в той или иной октанте или под октанте; последовательности импульсов с доплеровскими частотами повторения на выходных шинах: Y7; Y8; задержанные импульсы - метки времени на выходных шинах: Y10; Y11; Y12; импульс - метку времени, определяющую момент начала самообороны робота от мешающего ему предмета, сформированный на выходе первого УФМВ - выходе YК УФСОЖР.
Рассмотрим более подробно, например, как робот, с помощью УВНОРПМ (фиг.17), может прийти к месту своего предписания (к маяку), находящемуся на значительном удалении от него. Решить данную задачу, наиболее просто, можно при отличии амплитуд отраженных от цели и маяка радиосигналов, принятых роботом, при равных (заданных) удалениях между объектами. Последнее можно осуществить, например, посредством установки на маяке усиливающего радиосигнал пере излучателя. Тогда, при излучении роботом ЛЧМ сигнала с частотой f, изменяющейся по закону ограниченной возрастающей прямой со скоростью g=Fd, на выходе ССМ УФВНРС, смешивающего излученный и отраженный от цели ЛЧМ сигналы, получают, при точном сближении объектов и расстоянии Д между объектами, сигнал биений [1] с частотой Fбi=2Дg/С - (Fд=2fVi/С). А при расстоянии между объектами Д+tзVi - сигнал биений с частотой Fб=2Дg/С. Так, например, для получения Fб=1,333МГц необходимо чтобы было: С=3×108м/с; S=1500м; F=С/2S=100КГц; Д=1,333км; d=СFб/2ДF=1,5МГц; g=15×1010/Гц2; f=1,5ГГц; tз=0,01с; Vi=1м/с - скорости робота, при Fд=10Гц – частоте Доплера, что не проблематично. Т.е., в данном случае, при расстоянии между объектами в 1,333км, можно утверждать, что если обнаружить сигнал биений с частотой Fб=1,333МГц и сформировать в момент обнаружения короткий импульс – метку времени, то до прихода робота к маяку существует время Д/Vi=1333с, которые необходимо использовать, по крайней мере, для совмещения визира (вектора, проведенного из центра Октанты в один из концов её стержней) робота с направлением на маяк. Рассмотрим, как это можно сделать.
Сформировать метку времени можно как классическим (Ф., п.52), так и оригинальным (Ф., п.54) способами, реализованными с помощью альтернативных УФМВ (фиг. 3 и 4). При этом, при классическом способе, проводят подсчет периодов частоты Fб за установленный интервал времени tизм, например, 10-5с, подсчитанное целое (Nсч=Fбtизм=13) количество которых далее, на ЦК11 (фиг.3), сравнивают с числом Nуст=13 установленным на шине Х1. И если Nсч>Nуст, что возможно только при нахождении маяка на удалении большем чем Д от робота, то метки времени не формируют, а если Nсч<Nуст, или при равенстве чисел, то формируют и считают цель, или маяк, обнаруженными. При этом максимальная ошибка в обнаружении маяка по дальности определится одним периодом частоты Fб и в нашем случае величиной С/g2tизм=100м, что при удалении между объектами в 1,333км не критично. А интервалы измерения, в виде последовательности импульсов измерения длительностью tизм и паузой между импульсами, например, в один период частоты сигнала ГСИ1, формируют схемой (фиг.3), в которой импульсы ГСИ1 постоянно подсчитываются СЧ4 нагруженным тремя ДШ: 2; 5 и 6. При этом ДШ2 обнаруживает цифровое число соответствующее 1, ДШ6 – максимальному числу К импульсов, которое может подсчитать СЧ4, ДШ5 – числу К-1. Таким образом на выходе ТР3 формируется последовательность импульсов измерения, в течении длительности которых, через элемент И9, на СЧ10, с входной шины Х, поступают видеоимпульсы сигнала биений частотой Fб, подсчитываемые СЧ10, формирующим, периодически, числа Nсч и обнуляемый импульсом с выхода ДШ6. Очевидно, что в рассматриваемом случае, только при расстоянии между объектами в 1,333км(+/-)100м, на выходе СЧ10 будет сформировано цифровое число сопоставимое с числом Nуст и на выходе ЦК11 будет сформирован потенциал пропускаемый, через элемент И12, в течении паузы между импульсами в последовательности, сформированной на выходе элемента НЕ7, на РГ8. При этом на предпоследнем выходе РГ8 импульс – метка времени появится только после нескольких раз обнаружения маяка, что повышает надежность и точность обнаружения цели.
Обнаружить сигнал с частотой Fб можно также посредством селекции импульсов СЕЛ по а.с. №1083355 [2], который, будучи реализованный на базе, например, элементов 133 серии, имеющей естественную задержку распространения сигналов tзр=10нс, будет формировать на выходе первого своего каскада импульс - обнаружения сигнала частотой Fб, при поступлении на его вход импульсов от tС1=10нс до tС2=20нс, не более и не менее. Т. е., если видеоимпульсы с частотой следования Fб=1,333МГц и длительностью 1/2Fб=375нс, поступающие на входную шину Х (фиг.4) задержать на 365нс ЛЗ1 и логически перемножить, на элементе И2, с незадержанными видеоимпульсами, то на выходе элемента И2 будут сформированы импульсы длительностью 10нс, обнаруживаемые СЕЛ3. Отметим, что при частоте следования видеоимпульсов Fб1,299=1,299МГц длительностью 385нс и при их задержке на те же 365нс, на выходе элемента И2 будут сформированы импульсы длительностью 20нс, обнаруживаемые также СЕЛ3. Так как на другие импульсы СЕЛ3 не реагирует, то, очевидно, можно считать, что цель обнаруживается с точностью, по дальности, ДFб/Fб1,299 - Д=35м. А РГ4 выполняет туже самую функцию что и РГ8 в УФМВ(фиг.3)
Сразу отметим, что гармонические сигналы биений с частотами Fбi, в том числе и Fб=1,333МГц, формируют на выходе ССМ УФСОЖР, которые далее выделяют ФСБ1 и избирают УФРЧ2, 3, 4 и 5 УФУРС (фиг.7), с полосами частот не включающими доплеровских составляющих, для дальнейшего преобразования в видеоимпульсы ПР 6, 7, 8 и 9, например, с помощью АК, при пересечении гармоническими сигналами пороговых напряжений. Подобный способ выделения полезных сигналов узкого спектра частот, более узкополосными фильтрами, позволяет повысить чувствительность робота при обнаружении целей и маяка. Кроме того, из совокупности разностных сигналов, сформированных на выходе ССМ в УФСОЖР, формируют в УФДРС (фиг.6) доплеровские разностные сигналы, посредством смешивания в ССМ2 сигнала гетеродина 3 с сигналами присутствующими на выходе ФСБ1 и выделения сигналов Доплера ФДРЧ4, в момент нахождения цели на заданном удалении от излучателя ЛЧМ сигнала и после подачи на вход элемента И6 разрешающего потенциала с шины Х1, которым последовательность видеоимпульсов доплеровской частоты с выхода ПР5, пропускается на выходную шину Y УФДРС. Особенность данного способа формирования сигналов Доплера заключается в том, что они формируются в момент нахождения цели на заданном удалении от излучателя ЛЧМ сигнала, что позволяет, одновременно, иметь информацию и о дальности до цели и о её скорости, причем в 2 раза быстрее чем известным способом [1].
Обнаружив маяк на удалении Д от себя, робот, с помощью выше рассмотренных УОМЦП, определяет, в какой октанте и в какой под октанте находится маяк. После чего он, с помощью УВНОРПМ (фиг.17), устанавливает направление своего отклонения от маяка и посредством разворота на известный угол, определяемый номером установленной под октанты, устанавливает свой визир (вектор проведенный из центра Октанты в сторону одной, заранее выбранной, приемной антенны) по линии (в авиации, глиссаде) совпадающей с центральной осью под октанты (линии проведенные через центр Октанты и центры поверхностей под октант), что позволяет, по знакам разностей расстояний между маяком и противоположными точками окончания осей Октанты, определить знаки отклонения визира робота от направления на маяк по курсу и высоте, а по величинам разностей расстояний – величину углов отклонения визира робота от направления на маяк. И всё сказанное относительно заданной точки на глиссаде, отстоящей на расстоянии Д от робота (от центра Октанты). Т. е., по сути, определить пеленг маяка в текущий момент времени и постараться свести его к нулю, посредством разворота на определенный угол и в определённом направлении, следующим образом. Пусть, в конкретный момент времени, визир робота, стоящего на земле, направлен: в сторону приемной антенны <Д>, расположенной впереди робота, справа от антенны <А> и параллельно земле; перпендикулярно осям Октанты ЕЛ и АВ, последняя из которых направлена также параллельно земле. Тогда, если расстояние от маяка до антенны <А>, NАС, будет больше расстояние от маяка до антенны <В>, NВС, то на выходе элемента И1 (фиг. 17) появится, например, высокий потенциал, под действием которого ИУ7 повернет робота вправо, чтобы совместить визир, по курсу, с направлением на маяк. И аналогично, при NЕС>NЛС, ИУ9 повернет робота вверх, чтобы совместить визир, по высоте, с направлением на маяк. Причём отклонения, в нужном направлении, робот совершает только при неравенстве величин расстояний NАС и NВС, NЕС и NЛС, NМС и NДС, а также при значительном превышении сигнала отраженного от маяка над заранее установленным уровнем сигнала на шине Х2 АК26, на шину Х1 которого поступает уровень сигнала, отраженный от маяка или от цели. При равенстве же величин расстояний NАС и NВС, NЕС и NЛС, NМС и NДС, срабатывают ИУ16, 20, 24, или часть из них, которые запрещают проведение коррекции визира считая, что робот движется правильно в место своего предписания.
После первой коррекции пеленга и сближения с маяком, робот изменяет параметры ЛЧМ сигнала, увеличивая скорость изменения частоты ЛЧМ сигнала, после подачи на шину Х передатчика ПД устройства УФВНРС, импульса с выхода ИЛИ6 УФСОЖР, который объединяет выходы РГ5, тактируемого импульсами с выхода РВ4, срабатывающего от формируемых четвертым УФМВ меток времени. Т. е. робот осуществляет коррекцию пеленгов при последовательном способе обнаружения цели (Ф., п. 56), а может и при параллельном способе (Ф., п. 55). Но как будет видно из дальнейшего, для обеспечения жизнедеятельности робота наиболее оптимальным является обнаружение цели последовательно параллельным способом (Ф., п. 57).
Увеличить скорость g изменения частоты ЛЧМ сигнала можно, по крайней мере, тремя способами (Ф., п .п. 34, 36,38), с помощью ПД (фиг.8,9,10).
В ПД (фиг.8) изменение g=Fd осуществляют посредством дискретного изменения частоты Fмодуляции следующим образом. При приходе на СЧ9 импульса, на его выходах устанавливается цифровой код, согласно которому на выходе УЭК2 устанавливается соответствующий уровень постоянного напряжения, сформированный в БЭН1, согласно которому на выходе ГУН3 формируется непрерывный сигнал с соответствующей частотой fгун2, который далее преобразуется, ПР4, в последовательность видеоимпульсов подсчитываемых СЧ5, формирующим на своем выходе цифровой код меняющийся, за разное время определяемое fгун2, от установленных минимума до максимума. Цифровой код, согласно которому на выходе ЦАП6 формируется периодически повторяющееся и ограниченное по времени и амплитуде линейно возрастающее напряжение. Повторяющееся с частотой F, являющейся функцией цифрового кода на выходах СЧ9 и очередности поступающих на его вход Х импульсов. И после подачи данного напряжения на вход управления ГУН7, на его выходе формируется ЛЧМ сигнал с неизменной dдевиацией и, при необходимости, изменяемой частотой F модуляции, который поступает на выход Y1 и усиленным УМ8. на выход Y2
В ПД (фиг.9) изменение gосуществляют посредством дискретного изменения девиации d следующим образом. Частота сформированного на выходе ГУН1 ЛЧМ сигнала, последовательно, удваивается в СМ2 ячеек и сигналы с удвоенными частотами выделяются ФСЧ3 ячеек. Т. е. на выходах ФСЧ3 формируются ЛЧМ сигналы с постоянной частотой F модуляции и изменяемыми f и d, которые, через управляемый цифровым кодом с выхода СЧ5 УЭК6, поступают на выходную шину Y1 и усиленными УМ4 на выходную шину Y2.
В ПД (фиг.10) изменение g осуществляют посредством одновременного дискретного изменения и девиации d и частоты модуляции F ЛЧМ сигнала, следующим образом. ПД представляет собой объединенный вариант двух предыдущих ПД, при котором, сформированный одним ПД, с необходимой частотой F модуляции ЛЧМ сигнал, подают на другой ПД, которым изменяют его девиацию d.
Очевидно, что до прихода робота к маяку он должен провести не одну коррекцию пеленгов, способом по п.6 и соответственно не одно изменение частоты ЛЧМ сигнала, на разных рассчитанных расстояниях Дi между объектами, при которых частота Fб=g2Дi/С=1,333МГц сигналов биений, в рассматриваемом случае, должна оставаться неизменной, что выполнимо, так как при сближении робота с маяком Дi уменьшается, а g обеспечено возрастание. Следует отметить, что рассмотренный процесс приближения робота к маяку аналогичен процессу посадки по глиссаде самолета на взлетно - посадочную полосу (ВПП) аэродрома, когда на самолет, периодически, передается информация о величинах и знаках его отклонений, по курсу и высоте, от заданных точек глиссады. Т. е., налицо, возможность осуществления роботом функции приданной радиолокационным станциям посадки самолетов, типа РСП6(7,8) и, соответственно, применение УФСОЖР в качестве РСП, при посадке самолетов способом (Ф., п. 68). При этом в качестве УОВЗОСГ (Ф., п.65) могут быть применены УОЗВРДЧ (фиг.1 а, б, в) работающие следующим образом.
В УОЗВРДЧ (фиг.1а) одновременно ограниченные по длительности последовательности видеоимпульсов с частотой следования Fi и Fj поступают, соответственно, на И1 и И4, разрешая, в течении длительностей импульсов, проводить подсчет счётных импульсов ГСИ6, соответственно, СЧ2 и СЧ5. Очевидно, что после окончания последовательности и вычитания в СВ3, (или сравнении величин счета на ЦК), друг из друга (друг с другом), результатов СЧ, на выходе Хij СВ(ЦК) будет сформирован результат вычитания (сравнения), пропорциональный разности двух частот, а на выходах Хi>Хj и Хi<Хj – знаки разности двух частот Fi и Fj.
В УОЗВРДЧ (фиг.1б) одновременно ограниченные по длительности гармонические последовательности видеоимпульсов с частотой следования Fi и Fj, поступают, соответственно, на СЕЛ1 и СЕЛ4 [2], выходы которых, соответственно, через ИЛИ2 и ИЛИ5 объединены, что позволяет на их выходах получить потенциалы, моменты возникновения которых зависят от длительностей импульсов в последовательностях и соответственно, на выходах Хi>Хj и Хi<Хj ФДЗ3 [3], формирующего знаки разности двух частот Fi и Fj, а на выходе ИЛИ6, объединяющего выходы ФДЗ3, можно получить импульс по длительности пропорциональный разности двух частот.
В УОЗВРДЧ (фиг.1в), ограниченные по длительности последовательности видеоимпульсов с частотой следования Fi и Fj поступают, соответственно, на СЧ1 и СЧ4 и импульсы последовательностей подсчитываются. Нагрузками СЧ1 и СЧ4 являются ДШ2 и ДШ5, срабатывающие на одинаковое цифровое число. Поэтому, при разных Fi и Fj, ДШ2 и ДШ5, сработают неодновременно, на что реагирует ФДЗ3 аналогичным образом, как и в предыдущем УОЗВРДЧ (фиг.1б).
Следует отметить, что робот может осуществлять посадку самолета не только при совмещенных глиссаде с визиром, но и, при соответствующих расчетах, при расположении антенной системы робота – Октанты, соответствующих размеров (с осями Октанты не более 5-10м), в стороне от ВПП аэродрома (в сотнях метрах), способом (Ф., п.69) и, конечно, при соответствующих параметрах ЛЧМ сигнала, т.е. Для лучшего восприятия и облегчения проведения вычислений на (фиг.5), образно, изобразим чертеж расположения необходимых объектов РСП на аэродроме, с примерными размерами в метрах и, для наглядности, не соблюдёнными пропорциями. Где: КГN - глиссада – линия под, примерно, углом 5,470 проведенная к ВПП - шириной 60, длинной ЦГ12=1800 от центра ВПП, в точке Ц и точкой К посадки самолета, на расстоянии ЦК=1450. Приемные антенны РСП расположены на поверхности Онтанты с радиусом 10, в точках Октанты А, В, Е и Л, в центре которой расположена антенна <О>, в точке О. Октанты, с осью МД направленной параллельно земле и ВПП, в сторону сажаемого самолета, удалена от ВПП на ЦЛ=210. Приемные антенны <А> и <В>, предназначенные для формирования информации об отклонениях самолета от глиссады по курсу, расположены на линии параллельной линии ЦЛ, на высоте 10 от земли, а антенны <Е> и <Л>, предназначенные для формирования информации об отклонениях самолета от глиссады по высоте, направлены перпендикулярно земле. Расстояния ЦГ12=1800, ЦГ11=3150, ЦГ1N=5000 - расстояния удалений по земле точек глиссады Г2, Г1, ГN - точек высоты принятий решений (ВПР2, ВПР1, ВПРN). Точки Сi - точки возможного нахождения самолета в районе точек Гiглиссады. В табл.1 приведены данные о расстояниях от приемных антенн до точек Гi глиссады, в которых обязан быть самолет при его посадке, по крайней мере, для точек высоты принятия решений ВПР1 и ВПР2, а также до самолета, находящегося в точке Сi пространства, например, на удалении 5м от точки Гi. Точки Г1 ВПР1- принятия решения о необходимости продолжать посадку или самолету уходить на второй круг. Точки Г2 ВПР2 - принятия решения о посадке самолета или её запрете. В табл.2 приведены данные о количестве периодов частоты обнаруживаемых УФМВ частот сигналов биений, например, за время измерения tизм=1с, в виде цифрового числа Nсч=[(ЛГi-ЕГi)-(ЛСi-ЕСi)] ×tизм×Fi×d/С[м×сек×Гц×Гц×сек/м], при параметрах ЛЧМ сигнала: FN=20КГц, F1=(ОГN/ОГ1)FN=31729,253Гц, F2=(ОГN/ОГ2)FN=55322,435Гц; d=1,6МГц; f=960МГц; С=3×108м/с. Анализируя данные таблиц можно сделать вывод о том, что отклонения самолета от точек глиссады на 5м, как по курсу, так и по высоте, приводят к разности подсчитываемых, в рассматриваемом случае за 1с, периодов частот сигналов биений, на величину в 6, или 16 штук. А при отклонениях на 1м – на величину в 1, или 3 штук, что, очевидно, позволяет по величинам NЛЕ и NАВ судить о реальных, в метрах, отклонениях самолета от точек глиссады.
При своем перемещении робот может встречаться с стационарно расположенными препятствиями, которые необходимо обходить, желательно оптимально, при небольших скоростях перемещения, например, при ходьбе со скоростью, Vцм=1м/с. Причём, при реакции робота tрр=1с – умении робота избежать столкновения с препятствием и обнаружении препятствия на удалении, например, 6м от себя и необходимости в том, чтобы оставалось Fб=1,333МГц, надо чтобы было, например, F=600КГц и d=56МГц. Помимо этого, очевидно, желательно знать, не с промахом ли робот приближается, например, к телефонному столбу и к какому по габаритам препятствию, а также о сближении с препятствием или удалении от него и о диапазоне скоростей целей.
Информацию о сближении с препятствием или удалении от него робот формирует с помощью УОНПЦ (фиг.12), содержащего два УИЧС (фиг.11) нагруженных на ФДЗ1 [3]. При этом УИЧС представляет собой РГ1 тактируемый, через шину Х, в нашем случае, видеоимпульсами последовательности с доплеровской частотой следования, первый и последний из которых могут по длительности отличаться от остальных и формирующий на втором своём выходе потенциал, открывающий элемент И3 для прохождения счетных импульсов с ГСИ3 на СЧ4. Отметим, что такой измеритель частоты сигнала позволяет выбирать только полноценные видеоимпульсы из последовательности, для их заполнения счетными импульсами и подсчете последних, что позволяет более точно измерить, в частности, частоту Доплера и соответственно, радиальную скорость цели, при применении УИЧС в качестве УИРСЦ (Ф, п. п. 29). Тогда, очевидно, что если с помощью одного УИРСЦ робот измерит радиальную скорость цели, при её нахождении в одной точке пространства, а с помощью другого, в другой точке, то по очередности определения скоростей, которая зависит от расстояния между роботом и точками, по выходу ФДЗ1 (фиг.12), робот может определить, удаляется или приближается цель.
Габариты цели, большая или маленькая она, робот определяет посредством накопления импульсов – меток времени ИНТ1 в УОГЦ (фиг.13), за время пересечения целью рубежа, отстоящего от робота на удалении Дi+Vitз или Дi-Vitз, например, 7м+(1м/с)(f/g=1,5ГГц/600КГцХ56МГц)=7,00004м, при приближении робота к неподвижному препятствию со средней скоростью Vср=1м/с и tз=336Х1011Гц2. Очевидно, что расстояние в S1=7,00004м-7м=0,04мм можно, в нашем случае, назвать чувственной зоной робота, размеры которой зависят от скорости сближения объектов и как <<шегреневая кожа>> могут изменяться. Т. е. УФМВ, очевидно, можно применять в качестве формирователей чувственных зон (Ф., п. п. 63, 64), или в качестве устройств охранения границ объектов (Ф., п. п. 61,62), при пересечении которых будет формироваться метка времени и, соответственно, срабатывать исполнительное устройство, или в качестве многоразовых мишеней (Ф., п. п. 59, 60), при стрельбе по которым последние, с большой долей вероятности, остаются целыми (при непопадании в излучатель радиосигнала). Таким образом, при обнаружении препятствия на заданном удалении от себя, робот, с помощью ИНТ1, за время пересечения целью чувственной зоны (чем габаритнее цель, тем дольше она пересекает зону), формирует на выходе ИНТ1 напряжение, после превышения которым порогового напряжения установленного на шине Х1 АК2, на выходе АК2 формируется высокий потенциал, который остаётся до момента выхода цели из чувствительной зоны, что позволяет утверждать, что длительность импульса на выходе АК2, выходная шина YГ, является функцией габаритов препятствия.
Определить, с промахом или нет сближаются объекты можно несколькими способами. Наиболее просто это можно сделать с применением (Ф., п. п. 21, 22) УФМВ, при установлении зоны промаха за пределами рубежа определения импульса – метки времени, например, 6м от робота. А наиболее классический способ (Ф., п. п. 17, 18) заключается в сравнении двух доплеровских частот (радиальных скоростей цели) измеренных, с помощью двух УИРСЦ УОПРЦ (фиг.14), при нахождении цели в двух разнесенных точках пространства и после деления, делителем 3 (ДЛ) величин измеренных скоростей друг на друга и сравнения на ЦК4 полученного отношения с установленной величиной, на шине Х3, определяющей зону промаха, по знаку потенциала на выходе ЦК4, выходная шина YПР, робот заключает, с промахом или нет он сближается с препятствием. Определить промах цели можно и оригинальным способом (Ф., п. п. 19, 20), который заключается в: формировании интервала времени tпр между двумя моментами обнаружения цели, при её нахождении на удалениях плюс и минус S1 от заданного Д; сравнении интервала времени tпр с временем 2tз – преодоления роботом расстояния в 2S1 и при их соответствующем неравенстве констатировании факта сближения объектов с промахом. Здесь следует отметить, что с помощью УОПРЦ (фиг.14), можно также определить и линейную скорость цели (Vл), так как интервал времени между моментами формирования информации о радиальных скоростях цели на выходных шинах YVЦ1 и YVЦ2 равен величине tл=(Д2-Д1)/Vл, где Д2 и Д1 - заданные удаления от робота, на которых он собирается вычислять частоты Доплера.
Определение диапазона скоростей целей робот осуществляет УОДС (фиг.16) посредством (Ф., п. п. 23, 24): измерения частоты Fс сигнала соответствующей скорости цели; сравнения величины Fс с двумя величинами, F1 и F2; констатирования факта, что если Fс>F1, или Fс< F2, или F2< Fс< F1, то цель движется со скоростью относящейся, соответственно, к диапазону больших, малых и средних скоростей перемещения.
При отмеченном выше, выбор направления отклонения от препятствия робот осуществляет с помощью УВНОРП (фиг.20), способом (Ф., п.3), в момент совпадения информаций о том, что: столкновение робота с препятствием (объектов) неминуемо; скорость сближения объектов небольшая; момент отклонения наступил и запрета на проведение отклонения не поступило, информации в виде соответствующего потенциала на выходе элемента И13 УВНОРП и соответственно на выходах элементов И1,..., И6 и входах ИУ7,...ИУ12, что позволяет роботу проводить отклонения от визира при: NАС>NВС-влево; NАС<NВС-вправо; NЕС>NЛС-вниз; NЕС<NЛС-вверх; NМС>NДС-назад; NМС<NДС-вперед, где: NАС; NВС; NЕС; NЛС; NМС и NДС - величины расстояний между препятствием, оказавшимся на заданном удалении от робота и его приемными антеннами.
Помимо препятствий не представляющих особой опасности существуют и такие, от которых необходимо само защищаться, например, летящий в сторону робота предмет, нападение на робота животного и т.п., возможно активно (устранение препятствий) или пассивно - обход препятствий или их игнорирование (мухи). Как правило такие препятствия обладают значительной скоростью перемещения (Vцс, Vцб) и могут избираться по скорости цели, при подаче на входы: Yvб; Yvс; Yvм, соответственно, УВСЗ (вход И97), УНСЗЦ (вход И53), УВНОРПМ (вход И13) и И1 (фиг.21) соответствующих потенциалов. При этом, например, при средней скорости цели, в УНСЗЦ (фиг.23) откроется один из элементов И1,....., И48 и, ППЗУ54 выдаст информацию на ИУ55, устанавливающее визир робота на линию, проведенную через центр Октанты робота и центр поверхности 1/48 части Октанты, в которой находится цель, на соответствующий момент времени. После чего, через блоки элементов И (БЭИ), БЭИ56, БЭИ57, БЭИ58, БЭИ59, каждый элемент в которых подключен к одному из выходов Хij, например, СВ3 УОЗВРДЧ (фиг.1а), с помощью которых, например, реализовано УФВНРС, ИУ60,.....ИУ63 в УНСЗЦ (фиг.23) которых отклоняют средство защиты по курсу и высоте, в нужном направлении и на соответствующий угол, соответствующий величинам разностей расстояний между целью и приемными антеннами <А>и<В>, а также <Е>и<Л> робота, для его защиты.
При больших скоростях цели, когда времени на развороты средства защиты, как в предыдущем случае, нет, робот может защититься с помощью 48 средств защиты уже заранее установленных в нужное положение, каждое в середину поверхности сферы, вокруг Октанты, соответствующей под октанты, с помощью УВСЗ (фиг.22), способом по п.10. При этом в УВСЗ откроется один из элементов И1,....., И48 и, соответственно, сработает одно, нужное, из ИУ49,..... ,ИУ96, установив выбранное средство защиты в положение (заранее выбранное) направленное максимально на цель и заставляющее средство защиты, в нужный момент и при установленных условиях, защитить робота.
Проводимые действия робот осуществляет при отношениях сигнал/пассивная помеха (отражения радиосигнала местными предметами), последняя из которых определяется его узкими чувственными зонами, что выгодно отличает робота от известных РЛС, в которых помеха определяется гораздо существенными отражающими поверхностями. К тому же, при совершении роботом предстоящих действий в стационарном положении (посадка самолётов и т. п.), узкие места отражений могут быть устелены материалом рассеивающим или поглощающим радиосигналы, что значительно может повысить чувствительность робота. Но особым случаем, с точки зрения чувствительности робота, является тот, когда робот (Ф., п.п. 72, 102) находится в воздухе и, например, выполняет функцию всестороннего пеленгатора цели, когда соприкосновения его чувственных зон с отражающими поверхностями, типа земли, отсутствует.
Рассмотрим работу упомянутого пеленгатора цели. Очевидно, что определив местоположение цели в пространстве с помощью УОМЦП3 (Ф., п.13), т. е. в какой 1/48 части пространства относительно источника радиосигнала находится цель, можно говорить о пеленге цели (Ф., п.99). Достоинство такого пеленгатора – всестороннее определение пеленга цели. Недостаток – невозможность определения пеленга цели при нахождении в под октанте нескольких объектов. А вероятность такого события тем больше, чем в большем пространстве предполагается определять пеленги целей. Другое дело, если определять пеленг целей (Ф., п.101) при пересечении ими узкой(их) чувственных зон робота, располагаемых на известных расстояниях от него, когда вероятность одновременного пересечения зоны несколькими целями значительно меньше (мизерна), что становится осуществимо при обнаружении целей на заданных рубежах с помощью УФМВ. Очевидно также, что, например, при охране роботом определенной территории, интересно знать пеленг целей не относительно робота, находящегося над землёй, а относительно, например, центра охраняемой территории (Ф., п.102). Такое становится возможным, если робота – пеленгатора разместить, например, на сориентированном квадрокоптере поднятом над землей, или высокой вышке на охраняемой территории. И если при этом вычисленные роботом пеленги передавать на землю, на блок преобразующий их в пеленги относительно местоположения блока на земле, то данная задача будет выполнена. Что касается точности определения пеленгов целей, то, например, при решении задачи по определению местоположения приближающегося к охраняемой территории нарушителя, она вполне может быть приемлема для принятия решения, например, по защите территории в вычисленном нужном направлении. Что касается плоскостей определения пеленгов целей то их три (X,Y и Z). Очевидно, что центры 1/48 частей поверхности сферы вокруг излучателя радиосигнала можно считать точками упреждения цели при условии, что расстояние между излучателем радиосигнала и точками упреждения небольшие, что позволяет, например, при активной защите робота, её осуществить, посредством установки рядом с точкой упреждения предмета, в данном случае, соизмеримого с небольшой площадью 1/48 части поверхности сферы.
Как видно из вышесказанного, сигналы обеспечения жизнедеятельности робота сформированные в УФСОЖР соответствующими устройствами, преобразуются в УФИОЖР в импульс – команды несущие информацию о: нахождении препятствия или маяка в той или иной октанте или под октанте сферы вокруг робота; направлении перемещения цели относительно робота; возможности расхождения робота с препятствием и о габаритах, скорости и диапазонах скоростей цели, используя которые, с помощью устройства (фиг.21), робот осуществляет свою жизнедеятельность.
Литература
1. Под редакцией В.В.Дружинина, Справочник по основам радиолокационной техники. <<Военное издательство>>, 1967
2. а. с. №1083355
3. У. Титце, К. Шенк Полупроводниковая схемотехника, Москва,<<мир>>
4. Б. Г. Ананьев А. А. Теория ощущений <<издательство ленинградского университета имени Жданова А.А.>>, 1961.
5. <<Википедия>>.