Генератор приемного устройства подвержен нестабильности частот дискретизации, относительно передатчика на величину Δfд.
Математическая модель сигнала генератора приема y[n], учитывающая рассогласованность частот дискретизации (SRO), представлена выражением:

где:
− x(t) – тактовый сигнал генератора передачи;
− Tд = 1 / Fд – значение периода дискретизации генератора передачи;
− ε – нестабильность генератора дискретизации приема, относительно передатчика.
В соответствии с (1) основным фактором, характеризующим смещение значения, является фазовый набег, линейно растущий во времени.
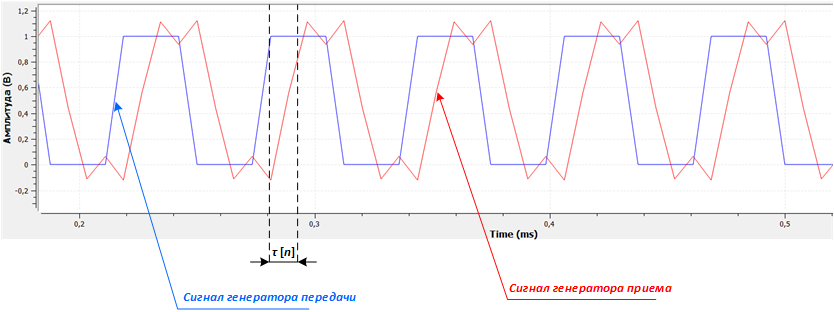
Моделирование эффекта сдвига частоты дискретизации можно представить, как моменты взятия n отсчета генератора передачи, смещенного на величину τ[n] относительно «идеального» (рис. 1):
Необходимость вычисления значения n отсчета сигнала y в момент времени не совпадающий с появлением соответствующего отсчета передающего генератора, делает необходимым использование метода интерполяции.
Для преобразования выражения (1) может быть использована полиномиальная интерполяция первого или третьего порядка:
При моделировании рассогласования тактовых генераторов реальных систем электрической связи условиям необходимо и достаточно знать максимально ожидаемое значение сдвига частоты дискретизации ε_max, которое определяется стабильностью опорного генератора.
Накопленная фазовая ошибка за N отсчетов в модулированном сигнале равна:
Следствием накопления фазовой ошибки в принимаемом сигнале будут является: вращение сигнального созвездия для сигналов с фазовой модуляцией (рис.2) и межсимвольная интерференция на выходе согласованных фильтров приемника из-за смещения значения несущей частоты в спектре модулированного колебания.
Блок «SRO Model» (рис. 3) библиотеки «Impairmaents» среды GNU Radio Companion преднамеренно вносит в сигнал искажения, вызванные рассогласованием частоты дискретизации между передатчиком и приемником. Расчет значений отсчетов выходного сигнала в блоке «SRO Model» производится согласно выражению (2). Параметр ε изменяется по Гауссовскому закону в интервале [0; ε_max].
Блок «SRO Model» имеет один вход «in» на который подается вектор значений типа «complex» и один выход «out» («complex»). В меню блока предусмотрены следующие параметры настройки (рис. 4):
1. Sample Rate Hz – Значение частоты дискретизации сигнала в Гц.
2. SRO Standart Deviation HZ per sample – Девиация случайного значения, используемого для выбора изменения частоты дискретизации на ±1 Гц на каждый отсчет тактирующего сигнала, значение вещественного типа (float). Определяет, случайное изменение частоты сдвига для каждого отсчета на значение «-1» или «1», моделируя рассогласование генераторов дискретизации приема и передачи.
3. Max CRO Bound Hz – Максимально допустимое значение сдвига частоты дискретизации в Герцах. Параметр ограничивает значение общего сдвига частоты, определяемое параметром «SRO Standart Deviation HZ per sample», чтобы оно не превышало разумные пределы для моделируемой системы, рис. 1.
4. Seed – Значение типа «int» используется для инициализации алгоритма генерации псевдослучайной последовательности чисел, задающих значения сдвига частоты каждого отсчета.
Потоковый граф, демонстрирующий рассогласование частот дискретизации блоком «SRO Model» (пример графа 10_2_v3_10_12_0_p3_12_9.grc).
Пример демонстрирует рассогласование генераторов частот дискретизации передачи и приема, а также влияние эффекта сдвига частоты дискретизации на момент начала обработки модулированного сигнала приемником.
При моделировании сдвига частот дискретизации в схеме используются два сигнальных генератора (блоки «Signal Source» выделены, синим прямоугольником со сплошной линией) косинусных колебаний на частотах 100 и 1 КГц с частотой дискретизации 32 КГц (определена в блоке переменной samp_rate), рис. 5.
Сигнал частотой 100 КГц из блока Signal Source поступает в блок SRO Model, где моделируется эффект рассогласования частот дискретизации со следующими характеристиками: максимально допустимое значение сдвига частоты дискретизации Max CRO Bound Hz = 1 Гц (блок QT GUI RANGE с ID= sro_deviation_max), значение дисперсии Гауссовского процесса для формирования приращения на каждом такте дискретизации ( SRO Standart Deviation HZ per sample = 0,1).
Значение величины частотного рассогласования устанавливается в переменной SRO Standart Deviation HZ per sample блоком QT GUI RANGE с ID= sro_deviation, а максимально допустимое значение сдвига частоты дискретизации в переменной Max SRO Bound Hz блока с ID= sro_deviation_max (выделены зеленой штрих пунктирной линией) рис. 5 и рис. 6 (а).
Результат моделирования визуализируется с помощью блоков QT GUI Time Sink (обведены, оранжевой прерывистой линией), рис. 5. Блок с ID= qtgui_time_sink_x_0_0 отображает сдвиг модулированного сигнала с относительного «идеального», рис. 6 (б). Блок с ID= qtgui_time_sink_x_0 отображает расхождение частот дискретизации в АЦП ПРД и ПРМ, рис. 6 (в).
Применение блока «SRO Model» связано в основном с тестированием и оценкой устойчивости алгоритмов синхронизации и компенсации рассогласования генераторного оборудования цифровых приемников.