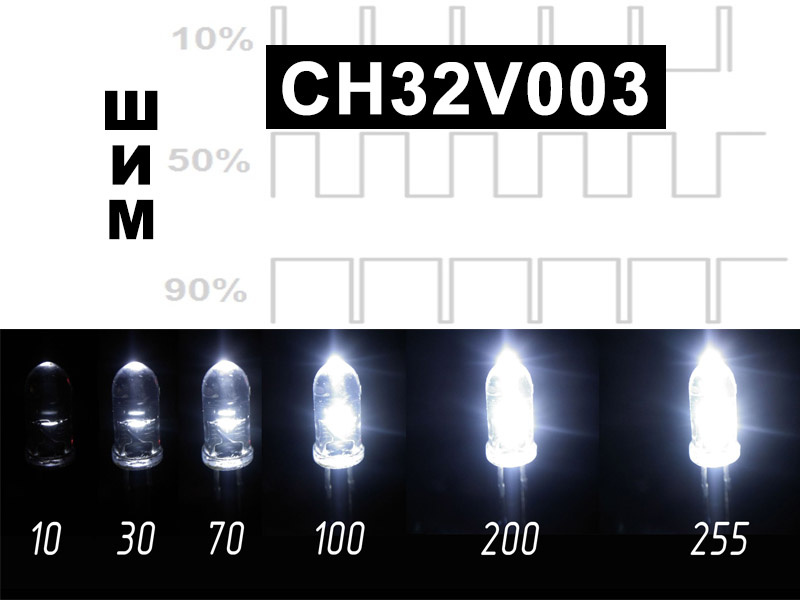
Микроконтроллер CH32V003 способен формировать ШИМ-сигналы (PWM), которые широко применяются в различных задачах: регулировка скорости DC-двигателей, генерация аудиосигналов, управление яркостью светодиодов и т.д.
Широтно-импульсная модуляция (ШИМ) — это метод управления, при котором ширина (длительность) цифрового импульса изменяется при сохранении постоянной частоты. Большинство микроконтроллеров имеют встроенные таймеры, которые можно использовать для генерации ШИМ-сигнала
Если обратиться к технической документации CH32V003, то можно увидеть, что он содержит два таймера: один продвинутый таймер, позволяющий генерировать ШИМ-сигналы с управлением паузами и комплементарными выходами, что обычно используется в силовой электронике (например, в системах управления двигателями или источниках питания). И второй, универсальный таймер, который также можно использовать для формирования ШИМ
Напишем программу в MounRiver Studio
Сначала функция инициализации ШИМ (PWM) на базе продвинутого таймера TIM1 для микроконтроллера CH32V003F4P6
void PWM_Init(uint16_t frequency){}
frequency - частота ШИМ
TIM1 использует 4 канала, настроим их всех
Тело функции
Первым шагом включаем тактирование необходимых периферийных блоков
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOC |RCC_APB2Periph_TIM1, ENABLE);
Делаем полную перепривязку таймера TIM1. Это необходимо, так как по умолчанию на CH32V003F4P6 выводы TIM1 могут быть назначены на другие порты
PIO_PinRemapConfig(GPIO_FullRemap_TIM1, ENABLE);
После ремапа выходы таймера TIM1 будут доступны на следующих пинах:
TIM1_CH1 -> PC4
TIM1_CH2 -> PC5
TIM1_CH3 -> PC7
TIM1_CH4 -> PD4
Настроим эти пины
GPIO_InitTypeDef GPIO_InitStructure = {0};
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitTypeDef GPIO_InitStructure2 = {0};
GPIO_InitStructure2.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure2.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure2.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure2);
Рассчитываем значение предделителя (Prescaler) для получения заданной частоты
SystemCoreClock - тактовая частота ядра (например, 48 МГц для CH32V003)
Оптимально: Prescaler = Тактовая_частота / (Частота_ШИМ_кГц * 1000)
uint16_t prescalerValue = (uint16_t)(SystemCoreClock / (frequency * 1000));
Задаём базовые параметры таймера
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure = {0};
TIM_TimeBaseStructure.TIM_Period = 1000;
// Определяет разрешение ШИМ и частоту обновления
// Счетчик считает от 0 до 1000
TIM_TimeBaseStructure.TIM_Prescaler = prescalerValue;
// Предделитель тактовой частоты
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
// Коэффициент деления для цифрового фильтра
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
// Режим счета "вверх" (от 0 до Period)
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
// Инициализация таймера
Каждый канал таймера (CH1-CH4) настраиваем для генерации ШИМ-сигнала. Начальная скважность (ширина импульса) устанавливается в 0 (сигнал постоянно низкий)
TIM_OCInitTypeDef TIM_OCInitStructure = {0};
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
// Режим ШИМ1: Активный уровень пока счетчик меньше значения Pulse
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// Выход канала включен
TIM_OCInitStructure.TIM_Pulse = 0;
// Начальное значение сравнения (скважность)
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
// Активный уровень сигнала - высокий
//При TIM_Pulse=0 на выходе будет низкий уровень.
Инициализация каждого из четырех каналов таймера TIM1
TIM_OC1Init(TIM1, &TIM_OCInitStructure); // Канал 1
TIM_OC2Init(TIM1, &TIM_OCInitStructure); // Канал 2
TIM_OC3Init(TIM1, &TIM_OCInitStructure); // Канал 3
TIM_OC4Init(TIM1, &TIM_OCInitStructure); // Канал 4
Включаем возможность управления выходами ШИМ для продвинутых таймеров. Часто этот пункт забывают
TIM_CtrlPWMOutputs(TIM1, ENABLE);
Включаем режим предварительной загрузки (preload) для регистров сравнения (CCR1-CCR4)
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable);
Включаем режим предварительной загрузки для регистра периода (ARR)
TIM_ARRPreloadConfig(TIM1, ENABLE);
Запуск таймера
TIM_Cmd(TIM1, ENABLE);
С этого момента таймер начинает считать, и на выводах появляются ШИМ-сигналы (с начальной скважностью 0)
Функция готова. Чтобы ей воспользоваться в основном потоке main() нужно выполнить
PWM_Init(10000);
Запустится таймер с частотой 10кГц
Теперь функция управления значениями ШИМ на каждом канале
void analogWrite(uint8_t led, uint16_t value)
Передаём два параметра. Первый – номер канала таймера. Второй его значение от 0 до 1000. Задаем ограничение на пределы значения value
if(value > 1000 || value < 0) return;
Если значение в заданных ограничениях, применяем его к каналам таймера в зависимости от его номера
if(led == 1) TIM_SetCompare1(TIM1, value); //PC4
else if(led == 2) TIM_SetCompare2(TIM1, value); //PC7
else if(led == 3) TIM_SetCompare3(TIM1, value); //PC5
else if(led == 4) TIM_SetCompare4(TIM1, value); //PD4
Функция готова к применению
Тестирование
Будем играть яркостью светодиода
Исходник - https://disk.yandex.ru/d/MDdiET0U5Q8kHw
Схема подключения светодиода стандартная через Мосфет
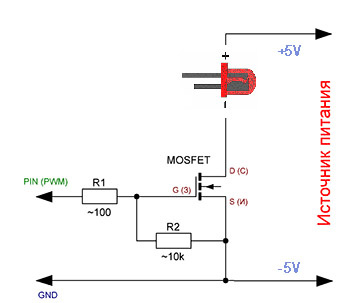
Собираем по схеме и подключаем
На PC4 увеличиваем яркость от 0 до 1000
for(int i = 0; i <= 1000; i+=10)
{
analogWrite(1, i);
Delay_Ms(10);
}
На PC7 уменьшаем яркость (код смотри в исходнике)
На PC5 имитация сердцебиения
На PD4 включить-выключить светодиод
Всё работает
Правильно подбирайте Мосфет. Микроконтроллер может работать от 3.3вольт. Не каждый Мосфет при таком напряжении откроется
Продолжение следует...