
(Статья может редактироваться со временем при появлении новой информации)
ГЛАВА 10
10.1. РАДИОЛОКАТОР ДЛЯ ГИБДД
Сотрудники государственной инспекции безопасности дорожного движения (ГИБДД) широко используют локаторы для измерения скорости перемещения автотранспорта, с целью выявления нарушений установленного скоростного режима на автострадах. Локаторы данного типа должны быть надежны при эксплуатации, иметь по возможности минимальные габариты и стоимость и обладать достаточной точностью измерения скорости перемещающегося автотранспорта. Данным требованиям вполне отвечают простейшие доплеровские локаторы с использованием непрерывного зондируемого вдоль автострады сигнала. Однако локаторы данного типа, при установке их на автомобилях и эксплуатации при движении автомобиля, требуют использования в них сложных устройств подавления сигналов Доплера, формируемых отражениями от земной поверхности и имеющих довольно широкий спектр частот, являющийся функцией скорости перемещения автомобиля ГИБДД. Кроме того, при использовании параллельного метода анализа частот сигналов Доплера и достижения значительной точности измерения скорости передвижения автотранспорта, требуется значительное количество узкополосных фильтров в спектроанализаторе. При методе же анализа частот сигналов Доплера с использованием устройства фазовой автоматической подстройки частоты (ФАПЧ) и одного узкополосного фильтра, увеличивается не только время измерения скорости автотранспорта, но и вероятность ложного срабатывания системы ФАПЧ, при появлении в её зоне захвата нескольких сигналов с разными частотами Доплера (при появлении в зоне действия локатора нескольких облучаемых им автомобилей).
Один из таких локаторов для ГИБДД описан в [18 из ст.№5], используя который обнаруживают автомобиль сначала на одном заданном удалении До минус (-)Д1 от излучателя НЛЧМ сигнала, при пересечении удаляющемся автомобилем одной <<чувственной зоны>> радиолокатора в момент времени t1, а затем обнаруживают автомобиль на другом заданном удалении 3До-Д1 от излучателя НЛЧМ сигнала, при пересечении им другой <<чувственной зоны>> радиолокатора, в момент времени t2. И скорость автомобиля вычисляют по формуле
Vавт=[(3До-Д1)-( До-Д1)]/(t1-t2)=2До/(t1-t2)
При этом обнаруживают автомобиль дважды, что можно осуществить, например, при использовании двух обнаружителей типа, рассмотренных формирователей меток времени (ФМВ) в моей ст.№7 (при параллельном нетрадиционном методе радиолокации), или при использовании одного обнаружителя и одного из дискретно перестраиваемых передатчиков типа, рассмотренных в моей ст.№7 (при последовательном нетрадиционном методе радиолокации).
Однако, с точки зрения экономичности и надёжности локатора ГИБДД данного типа, очевидно, желательно было бы его реализовать с одним обнаружителем и не перестраиваемым передатчиком НЛЧМ сигнала, что оказывается вполне возможным, так, например.
На рис. 10.1 приведен вид сверху на полосу автострады и:
- окружность (<<чувственная зона>> радиолокатора, например, установленного в центре окружности, в точке О, и на центральней продольной линии полосы автострады, а также с антенной радиолокатора, типа изотропного излучателя, установленной в точке О и, например, над покрытием автострады, но ниже самой нижней точки самого маленького из возможных автомобилей);
- автомобиль, точка Ц, приближающийся к антенне радиолокатора;
- точка Д1, отстоящая от точки О на заданном удалении Д2 плюс (+) расстояние (tз=f/Fмfд=f/g)V, то есть при скорости V приближающегося к точке О автомобиля на удалении
Д2 +tзV,
при нахождении автомобиля в которой и при излучении локатором непрерывного линейно частотно модулированного (НЛЧМ) сигнала с: частотой f, изменяющейся по закону возрастающей ограниченной прямой; частотой Fм – модуляции частоты f; fд – девиацией частоты f; g - скоростью изменения частоты f; известным временем tз=f/Fмfд=f/g, за которое радиоволны, со скоростью света С, проходят расстояние в f/fд раз большее чем расстояние S однозначного определения дальности S=С/2Fм до цели, на локаторе будет формироваться сигнал биения с известной частотой:
Fфмв=2(Д2+Vtз)g/C-(2Vf/C)=2gД2/C
- точка Д2, отстоящая от точки О на заданном удалении Д2, при нахождении автомобиля в которой на локаторе будет формироваться сигнал биения с не известной частотой:
Fприбл=2Д2g/C-(2Vf/C)
- точка Д3, отстоящая от точки О на удалении Д2-Vtз, при нахождении удаляющегося от точки О автомобиля в которой на локаторе будет формироваться сигнал биения с известной частотой:
Fфмв=2(Д2-Vtз)g/C+(2Vf/C)=2gД2/C
- точка Д4, отстоящая от точки О на заданном удалении Д2, при нахождении автомобиля в которой на локаторе будет формироваться сигнал биения с не известной частотой:
Fудал=2Д2g/C+(2Vf/C)
- точка К установки видеокамеры на полотне автострады или над её полотном для, например, фиксирования номера автомобиля, превысившего установленную скорость движения по автостраде, после пересечения автомобилем точки Д3 и установления факта нарушения установленного правила дорожного движения.
Определения локатором ГИБДД превышения допустимой скорости автомобилем осуществляют следующим образом.
Пусть автомобиль (точка Ц, рис.10.1) приближается к <<чувственной зоне>> НЧР - нетрадиционного частотного радиолокатора (к точке О, рис.10.1), имеющего антенну, например, типа линейного разрезного вибратора, излучающей НЛЧМ сигнал в горизонтальной плоскости относительно точки О в ту и обратную сторону по продольной оси автомагистрали (диаграмма направленности такого вибратора образует восьмёрку с центров в точке О).
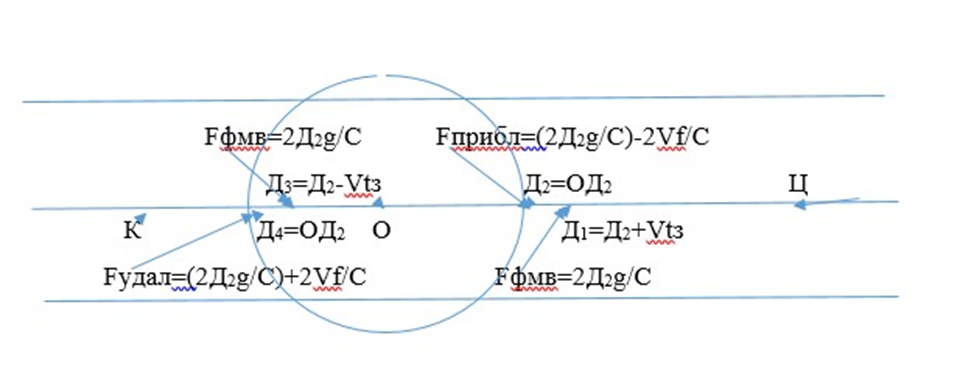
Рис.10.1
Тогда. при пересечении приближающимся к точке О автомобилем точки Д1 автомагистрали, на НЧР секторного обзора типа, рассмотренных в моей статье №13 или в [6 из ст.№5] и в вышеотмеченной [18 из ст.№5], будет формироваться и обнаруживаться сигнал биения частотой Fфмв=2Д2g/C, а также фиксироваться факт обнаружения данного сигнала одним из формирователей метки времени (ФМВ) типа, рассмотренных в моей ст.№7
После того, как автомобиль покинет точку Д1 и станет удаляться от точки О и окажется в точке Д3 автострады, на радиолокаторе вновь начнет формироваться и обнаруживаться сигнал биения частотой Fфмв=2Д2g/C (тем же ФМВ), а также фиксироваться, вторично, факт обнаружения данного сигнала биения.
Таким образом на радиолокаторе, при приодолении автомобилем известного расстояния 2Д2 за измеренный интервал времени tизм от момента первого обнаружения автомобиля до момента его второго обнаружения, можно определить скорость V движения автомобиля и сравнить её с допустимым значением Vдоп скорости перемещения автотранспорта на данном участке автомагистрали, для принятия соответствующего решения. И сделать это локатором ГИБДД с одним обнаружителем (ФМВ) и не перестраиваемым передатчиком НЛЧМ сигнала.
Следует отметить, что для надёжной работы локаторов ГИБДД данного типа необходимо выбирать расстояние 2Д2 больше длинны Lмах самого длинного из возможных автомобилей, которые предполагается проверять на предмет возможного превышения ими установленной скорости перемещения по автостраде, так как при 2Д2 < Lмах разделить моменты обнаружения автомобиля при его приближении к излучателю НЛЧМ сигнала и при его удалении от излучателя будет невозможно, по причине непрерывного формирования спектра отраженного от автомобиля сигнала в течении времени нахождения длины Lмах автомобиля на интервале расстояния от Д1 до Д3.
10.2. ВАРИАНТ РАДИОЛОКАТОРА ДЛЯ ГИБДД
Очевидно, что описанное в предыдущем разделе месторасположение радиолокатора ГИБДД на поверхности автострады может быть по каким-то причинам, или по каким-то соображениям не совсем приемлемым, то тогда радиолокатор можно будет расположить над автострадой, например, подняв его вертикально вверх над точкой О (рис.10.1), на высоту большую высоты Нмах самого высокого из возможных автомобилей, которые предполагается проверять на предмет возможного превышения ими установленной скорости перемещения по автостраде. При этом, если в первом случае можно было считать, что скорость автомобиля была почти равна его максимальной радиальной скорости. То во втором случае для определения реальной скорости автомобиля, очевидно, необходимо будет учитывать угол образуемый продольной линией автострады и линией, проходящей через локатор ГИБДД и автомобиль. Угол, который будет зависеть от высоты подъема локатора ГИБДД над автострадой.
10.3. ПРИМЕНЕНИЕ ЛОКАТОРОВ ГИБДД ДЛЯ ВЫЯВЛЕНИЯ
НАРУШИТЕЛЕЙ ПРАВИЛ ПЕРЕХОДА АВТОСТРАДЫ
Часто можно наблюдать как пешеходы (часто в одних и тех же местах) переходят (перебегают) автострады в неотведённых для этого местах (по дорожным переходам), что чревато самыми неприятными последствиями для нарушителей. Для устранения создания подобных пре цедентов или, по крайней мере, для уменьшения их количества, можно в столь злостных местах установить (на подобии фонарей на столбах) радиолокаторы ГИБДД типа, описанного в предыдущем разделе. Локатор, который будет фиксировать факт нарушения установленных правил перехода автострад в неустановленных местах, что, при необходимости, можно будет использовать для принятия соответствующих решений.
Очевидно, что подобное отмеченному может быть накладно. Но вот установить нечто подобное, например, в начале переходных полос через автостраду и включать радиолокаторы ГИБДД в момент разрешения движения автотранспорту, для того чтобы выявить, например, пешехода всё же решившего нарушить установленный порядок перехода через автостраду, или, например, выявить случайно выбежавшего в данный момент на автостраду ребёнка и мгновенно сообщить о случившемся пре цеденте, например, на светофор, для сигнализации им запрета на движение автотранспорта, это уже будет выглядеть не столь уж и неуместно.
10.4. ПРИМЕНЕНИЕ РАДИОЛОКАТОРОВ, РЕАЛИЗОВАННЫХ ПО
ПРИНЦИПУ РАДИОВЗРЫВАТЕЛЕЙ, В ГИБДД
Казалось бы, каким образом могут быть связаны между собой локатор ГИБДД и радио взрыватель. Оказывается, могут, по крайней мере, по принципу их реализации.
Так, например, в [17 из ст.5] или в моей ст.№15 приведен радио взрыватель, который можно использовать для формирования команды на выполнение того или иного действия. Так, при прямом предназначении данных устройств, это действие
заключается в выдаче команды на подрыв боеприпасов, совмещённых с радио взрывателями. А при реализации комплексов активной защиты (КАЗ) объектов (танков) функцию радио взрывателя выполняет устройство выдачи команды на пуск защитного боеприпаса (ЗБ) [6 из ст.№5 и моя ст.№13].
Особенность таких радио взрывателей [моя ст.№15 из моей ст.№5] заключается в том, что команда на выполнение того или иного действия выдается тогда, когда между точкой начала выполнения действия и точкой завершения задачи вызванной этим действием всегда будет только заданное расстояние Дзад. Так, например:
- при реализации активной защиты объектов ЗБ запускают в заданную точку упреждения только при условии, что он долетит до неё с известной постоянной скоростью преодолев заданное расстояние Дзад;
- подрывают ЗБ совмещённый с радио взрывателем только тогда, если его осколки после подрыва ЗБ смогут образовать эффективную площадь поражения на заданном расстоянии Дзад от места подрыва ЗБ и т. п.
Очевидно, что с помощью радиолокатора ГИБДД выявляют нарушителей скорости передвижения автотранспорта по автостраде для того, чтобы предъявить им те или иные претензии. Но для этого необходимо зафиксировать факт состоявшегося пре цедента, по крайней мере, например, сфотографировав номер машины, превысившей ею установленную скорость передвижения по автостраде. При этом, очевидно, для получения более качественного изображения номера транспортного средства передвижения (автомобиля) необходимо учитывать скорость приближения (удаления) автомобиля к радио локатору ГИБДД (скорость сближения или размежевания объектов), то есть выполнить отмеченную функцию радио взрывателя, выполняемую им автоматически. Тогда, очевидно, невзирая на скорость сближения или размежевания объектов, фотографирование номера автомобиля нарушителя будет осуществляться на одном и том же заданном расстоянии между объектами и необходимость в корректировке установки дальности до фотографируемого объекта на фотоаппарате отпадёт.