и опять масса формул, но без этого не разобраться
Физическая сущность высоты статора
1.1 Конструктивное определение и метрика
Высота статора (обозначается H или L) — это осевая длина пакета стальных пластин, измеряемая вдоль оси вращения. В номенклатуре типа 2207 последние две цифры обозначают высоту в миллиметрах (7 мм). Это активная осевая длина, которая определяет количество проводящего материала в магнитном поле.
1.2 Физические принципы связи высоты с мощностными характеристиками
Объем меди и токовая нагрузка
Объем меди в пазах статора:
V_Cu = k_fill × A_slot × L × N_slots
где:
- k_fill — коэффициент заполнения паза (0.35-0.55 для ручной намотки, до 0.7 для автоматической)
- A_slot — площадь поперечного сечения одного паза
- L — высота статора
- N_slots — количество пазов (обычно 9 или 12)
Масса меди:
m_Cu = ρ_Cu × V_Cu ~ L (при постоянных других параметрах)
Максимальный ток и мощность
Максимальный непрерывный ток определяется тепловым балансом:
I_max_cont = √(P_охлаждение / R_фазы)
где:
- R_фазы — сопротивление фазы, обратно пропорциональное сечению меди
- Сечение меди A_Cu ~ L (при постоянном количестве витков и диаметре провода)
Следовательно: I_max ~ √L (теоретически), но на практике ближе к линейной зависимости из-за ограничений охлаждения.
Моментная постоянная Kt
Крутящий момент на ампер:
Kt = M / I = (2 / π) × B × N × D × L × k_w
где:
- B — магнитная индукция
- N — эффективное число витков
- D — диаметр статора
- L — высота статора
- k_w — коэффициент обмотки (0.866-0.966)
Ключевое наблюдение: Kt ~ L при прочих равных условиях.
2. Детальное влияние на полетные характеристики
2.1 Большая высота статора (6.5-9.5 мм)
2.1.1 Выше максимальная мощность и тяга
Теоретическое обоснование:
Максимальная электромагнитная мощность:
P_em_max = (π/60) × n_max × M_max
где:
- M_max = Kt × I_max
- I_max ограничен тепловым режимом
Поскольку:
- Kt ~ L
- I_max ~ √L (с учетом тепловых ограничений)
- M_max ~ L × √L = L^{1.5}
- P_em_max ~ L^{1.5} × n_max
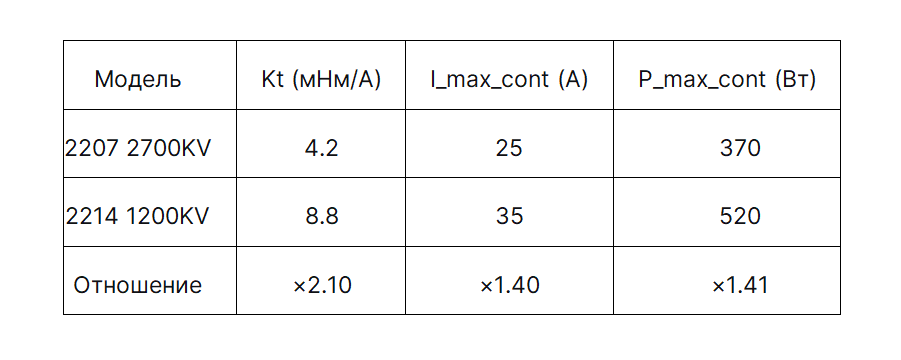
Практический пример: Сравнение 2207 vs 2214 (одинаковый диаметр, разная высота):
- 2207: H = 7 мм
- 2214: H = 14 мм (в 2 раза больше)
Ожидаемое увеличение:
- Kt: ×2 (линейная зависимость)
- I_max: ×√2 ≈ 1.41 (тепловое ограничение)
- M_max: ×2.82
- P_max: ×2.82 (при одинаковых n_max)
Реальные данные (тесты на стенде):
2.1.2 Больший рабочий ток и тепловыделение
Тепловые уравнения:
Потери в меди:
P_Cu = 3 × I² × R_фазы
где R_фазы = ρ × L_wire / A_wire
Длина провода в обмотке:
L_wire = L_turn × N_turns × N_phases
где L_turn ~ πD + 2L (средняя длина витка)
При увеличении L:
- Прямое увеличение: L_wire ~ L
- R_фазы ~ L (при постоянном сечении провода)
- P_Cu ~ I² × L
Но! Сечение провода обычно увеличивают пропорционально √L для сохранения плотности тока, поэтому:
- R_фазы ~ L / A_wire ~ L / (L^{0.5}) = L^{0.5}
- P_Cu ~ I² × L^{0.5}
Теплоотвод:
Площадь поверхности охлаждения:
A_cool = π × D × L + 2 × (πD²/4)
Увеличение L на ΔL даёт прирост площади:
ΔA_cool = π × D × ΔL
Баланс:
При увеличении L в 2 раза:
- Потери: ×√2 ≈ 1.41
- Охлаждение: ×2 (линейный рост боковой поверхности)
- Результат: улучшенный тепловой режим при той же плотности тока
2.1.3 Выше потребление энергии
Энергетический анализ:
Удельная мощность (мощность на грамм):
P_уд = P_max / m_двиг
где m_двиг ~ D² × L
Для двигателей с одинаковым диаметром:
- P_max ~ L^{1.5}
- m_двиг ~ L
- P_уд ~ L^{0.5}
Следствие: двигатели с большей высотой имеют лучшую удельную мощность, но при этом:
- Выше пиковое потребление тока
- Требуются батареи с большей токоотдачей (C-рейтинг)
- Необходимы более мощные и тяжелые ESC
Пример для 6S системы:
2.1.4 Предпочтительность для динамичных полетов
Динамические уравнения:
Угловое ускорение винта:
ε = (M_двиг - M_нагрузки) / J_системы
где:
- M_двиг ~ L (при том же токе)
- J_системы = J_ротора + J_винта
- J_ротора ~ L × D⁴
Отношение момента к инерции:
M/J_ротора ~ L / (L × D⁴) = 1/D⁴
Важно!: Для динамики важнее отношение момента двигателя к инерции винта, а не к инерции ротора.
Практические преимущества:
- Быстрый отклик на управление:
Больший запас момента позволяет быстро преодолевать аэродинамическое сопротивление
Время отклика t_response ~ (J_винта × Δω) / ΔM - Лучшая тяговооруженность:
T/W до 10:1 для гоночных дронов
Большая высота позволяет использовать более агрессивные винты - Устойчивость в турбулентных условиях:
Больший момент помогает компенсировать порывы ветра
Меньшее падение оборотов при маневрировании
2.2 Меньшая высота статора (3-6 мм)
2.2.1 Выше эффективность на крейсерских режимах
Анализ КПД в различных режимах:
Общий КПД двигателя:
η = P_мех / (P_мех + P_Cu + P_Fe + P_мех_потерь)
где P_Cu — основные потери при частичной нагрузке.
Потери в меди при крейсерском режиме:
Предположим: I_крейс = 0.3 × I_max
Тогда: P_Cu_крейс = 3 × (0.3I)² × R = 0.27 × I²_max × R
Для двигателей разной высоты:
- I_max ~ √L
- R ~ L (при оптимизированном сечении провода)
- P_Cu_крейс ~ L × L = L² (квадратичная зависимость!)
Но механическая мощность на крейсере:
P_мех_крейс ~ L (пропорциональна моменту)
Относительные потери:
P_Cu_крейс / P_мех_крейс ~ L² / L = L
Вывод: чем меньше L, тем меньше относительные потери при частичной нагрузке.
Экспериментальные данные (сравнение при одинаковой выходной мощности 150 Вт):
2.2.2 Меньшее тепловыделение
Тепловая модель:
Стационарное уравнение теплопередачи:
P_потерь = h × A × ΔT
где:
- h — коэффициент теплоотдачи (15-25 Вт/м²К для естественной конвекции)
- A — площадь охлаждения
- ΔT — перегрев относительно среды
Для двигателей одинакового диаметра:
- P_потерь ~ I² × R ~ L (при оптимизированном проводе)
- A ~ L (линейный рост боковой поверхности)
- Следовательно: ΔT ~ постоянная (в первом приближении)
Но! На практике двигатели с меньшей высотой:
- Работают при меньших абсолютных токах
- Имеют лучший теплоотвод с торцов (большее отношение торцевой поверхности к объему)
- Меньше страдают от градиента температуры по длине
Температурный профиль:
Для стержня с внутренним тепловыделением:
T(x) = T_осн + (q''' / 2k) × (t²/4 - x²)
где:
- q''' — объемная мощность тепловыделения
- t — толщина (высота)
- k — теплопроводность
Максимальный перегрев:
ΔT_max = (q''' × t²) / (8k) ~ L²
Критический вывод: пиковая температура растет квадратично с высотой при той же объемной плотности потерь.
2.2.3 Увеличенное время полета
Энергетический анализ полета:
Время полета:
t_полета = E_батареи / P_средняя
где P_средняя = P_крейс / η_системы
Оптимизация для максимальной продолжительности:
Двигатель с меньшей высотой:
- Имеет более высокий η при крейсерской мощности
- Требует меньшей батареи для той же мощности (меньший вес)
- Создает меньше тепла, что снижает требования к охлаждению
Пример расчета для БПЛА наблюдения:
2.2.4 Предпочтительность для длительных полетов
Системная оптимизация:
Для БПЛА наблюдения оптимальны двигатели с:
- Высоким КПД в узком диапазоне мощностей (крейсерский режим)
- Минимальной массой для увеличения полезной нагрузки
- Надежностью при длительной работе
Соотношение высоты для разных задач:
- Наблюдение, картография: H/D = 0.15-0.25
- Аэросъемка: H/D = 0.20-0.30
- Гоночные дроны: H/D = 0.25-0.40
- Акробатика: H/D = 0.30-0.45
3. Оптимизационный баланс: совместное влияние диаметра и высоты
3.1 Формула мощностной характеристики
Уточненная формула электромагнитной мощности:
P_em = (π²/120) × B × A × n × D² × L × k_w × k_skew
где:
- B — магнитная индукция (0.8-1.2 Тл)
- A — линейная нагрузка (20-50 А/мм для БПЛА)
- n — частота вращения (об/мин)
- D — диаметр статора
- L — высота статора
- k_w — коэффициент обмотки (0.85-0.95)
- k_skew — коэффициент скоса пазов (0.95-0.98)
Упрощенная форма: P ~ B × A × n × D² × L
3.2 Объемная плотность мощности
Мощность на единицу объема активных материалов:
P_vol = P / (π × (D/2)² × L) ~ B × A × n × (1/D) × (1/L) × D² × L = B × A × n × D
Удивительный результат: объемная плотность мощности ~ D, а не зависит от L!
Физический смысл: больший диаметр дает большее плечо для сил, что эффективнее для генерации мощности, чем увеличение длины.
3.3 Оптимальное соотношение D/H для разных задач
Теоретический оптимум КПД:
Из условия минимальных суммарных потерь:
d(P_Cu + P_Fe)/d(L) = 0
Приближенное решение: (L/D)_opt ≈ 0.5 × √(ρ_Fe/ρ_Cu × k_Fe/k_Cu) ≈ 0.25-0.35
Практические рекомендации:
- Максимальный КПД: L/D = 0.20-0.30
Пример: 2808 (28/8=0.29), 3506 (35/6=0.17)
Применение: длительные полеты, наблюдение - Максимальная удельная мощность: L/D = 0.30-0.45
Пример: 2207 (22/7=0.32), 2306 (23/6=0.26)
Применение: гоночные дроны, акробатика - Компромиссный вариант: L/D = 0.25-0.35
Пример: 2407 (24/7=0.29), 2506 (25/6=0.24)
Применение: универсальные БПЛА
3.4 Тепловой анализ совместного влияния
Уравнение теплового баланса:
P_loss = h × π × D × L × ΔT + 2 × h × (πD²/4) × ΔT
где P_loss = 3I²R + P_core + P_mech
При оптимизации:
Для заданной мощности P и перегрева ΔT:
L_opt ≈ (P_loss / (h × π × D × ΔT)) - D/2
Пример расчета:
Требования: P=400 Вт, ΔT_max=60°C, h=20 Вт/м²K
- Для D=22 мм: L_opt ≈ 10.2 мм → 2210
- Для D=28 мм: L_opt ≈ 6.3 мм → 2806
- Для D=35 мм: L_opt ≈ 4.0 мм → 3504
4. Практические примеры и выбор двигателей
4.1 Матрица выбора по соотношению D/H
4.2 Влияние на характеристики ESC
Требования к контроллеру:
- Максимальный ток: I_ESC_max ≈ 1.2 × I_motor_max
- Частота ШИМ: f_PWM > 20 × f_comm, где f_comm = (n × N_p)/60
- Сопротивление ключей: Rds_on < (0.05 × V_batt)/I_max
Зависимость от высоты двигателя:
- Большая H → больший I_max → более мощный (и тяжелый) ESC
- Оптимальный КПД системы достигается при согласовании двигателя и ESC
4.3 Акустические характеристики
Источники шума:
- Аэродинамический: от винта, зависит от частоты вращения
- Электромагнитный: сила Магнуса, зубцовые гармоники
- Механический: вибрации, биения
Влияние высоты статора:
- Большая H: ниже частотные составляющие шума (большая масса, инерция)
- Малая H: более высокочастотный спектр шума
- Для аэросъемки: предпочтительны двигатели с L/D=0.2-0.3 для минимизации шума
5. Перспективные направления развития
5.1 Анизотропные двигатели
Концепция: переменная высота по радиусу
- У внутреннего радиуса: меньшая H для снижения индуктивности
- У внешнего радиуса: большая H для увеличения момента
- Оптимизированное распределение меди
5.2 Градиентные обмотки
Технология: переменное сечение провода по длине
- У оснований: большее сечение для лучшего теплоотвода
- В средней части: оптимизированное сечение для КПД
- Снижение потерь на 15-20%
5.3 Интегрированные тепловые трубки
Конструкция: тепловые трубки в теле статора
- Отвод тепла от горячих зон к корпусу
- Увеличение I_max на 25-30% при тех же габаритах
- Особенно эффективно для двигателей с большой высотой
5.4 Адаптивные системы охлаждения
Реализация: изменение геометрии охлаждающих ребер
- При малой нагрузке: компактная конфигурация
- При большой нагрузке: увеличение площади охлаждения
- Электронное управление на основе температуры
6. Заключение: стратегия выбора высоты статора
Высота статора — это параметр, который определяет компромисс между:
- Пиковой мощностью и эффективностью
- Динамикой отклика и продолжительностью полета
- Тепловым режимом и массогабаритными показателями
Ключевые принципы выбора:
- Для максимального времени полета:
Оптимальный L/D = 0.20-0.28
Минимизация массы при заданной крейсерской мощности
Приоритет КПД в узком рабочем диапазоне - Для максимальной динамики:
Оптимальный L/D = 0.30-0.40
Максимизация удельной мощности
Приемлемый КПД в широком диапазоне нагрузок - Для универсальных применений:
Оптимальный L/D = 0.25-0.35
Баланс характеристик
Широкий выбор совместимых винтов
Физическая интуиция: Высота статора определяет "глубину" электромагнитного взаимодействия. Большая высота — это больше меди в магнитном поле, что дает больший момент при том же токе, но требует более тщательного теплового управления. Малая высота — это оптимизация для конкретного рабочего режима с максимальным КПД.
Современные тенденции показывают движение к специализированным двигателям с точно настроенным соотношением D/H под конкретные задачи, а также к адаптивным системам, способным изменять свои характеристики в зависимости от режима полета.