
Готовьтесь, будет много цифер и формул
Физическая сущность диаметра статора
1.1 Конструктивное определение
Диаметр статора (обозначается D) — это внешний диаметр пакета стальных пластин, на которые наматываются медные обмотки. В стандартной нотации типа 2207 первые две цифры обозначают диаметр в миллиметрах (22 мм), последующие — высоту статора (7 мм). Это электромагнитный активный диаметр, который определяет силовое взаимодействие между статором и ротором.
1.2 Физические принципы, связывающие диаметр с моментом и мощностью
Крутящий момент (M)
Крутящий момент двигателя определяется по формуле:
M = k_t × B × I × D² × L × N
где:
- k_t — конструктивный коэффициент (зависит от числа полюсов, шага обмотки)
- B — магнитная индукция в воздушном зазоре (0.8-1.2 Тл для NdFeB магнитов)
- I — ток в обмотке
- D — диаметр статора (влияет квадратично!)
- L — активная длина проводника в магнитном поле (связана с высотой статора)
- N — число витков
Ключевое следствие: момент растет пропорционально квадрату диаметра. Увеличение D с 22 мм до 31 мм (≈41%) дает увеличение момента примерно в (31/22)² ≈ 2 раза.
Мощность (P)
Мощность связана с моментом и угловой скоростью:
P = M × ω = M × (2π × n/60)
где:
- ω — угловая скорость, рад/с
- n — частота вращения, об/мин
Поскольку момент растет с D², а максимальные обороты ограничены механическими и электрическими факторами, пиковая мощность также растет примерно пропорционально D².
1.3 Магнитный поток и электромагнитная сила
Площадь взаимодействия магнита с обмоткой:
A_mag ≈ (π × D × L_p) / N_p
где:
- L_p — осевая длина магнита
- N_p — число полюсов
Больший диаметр увеличивает площадь взаимодействия, что позволяет:
- Увеличить магнитный поток через обмотки
- Повысить электромагнитную силу по закону Ампера: F = B × I × L_w
где L_w — длина проводника в магнитном поле
2. Детальное влияние на полетные характеристики
2.1 Больший диаметр статора (28-55 мм)
2.1.1 Выше крутящий момент при тех же оборотах
Техническое объяснение:
- Закон сохранения энергии: механическая мощность P_mech = M × ω
- При фиксированной угловой скорости ω, увеличение M требует увеличения электромагнитной мощности
- Больший D обеспечивает:
Бóльший плечо приложения силы (рычаг) для электромагнитных сил
Увеличенное количество меди в обмотках при той же плотности тока
Бóльшую площадь для размещения магнитов с более сильным магнитным потоком
Численный пример:
Двигатель 2807 (D=28 мм) против 2207 (D=22 мм):
- При одинаковой высоте статора 7 мм и конструкции
- Отношение моментов: (28/22)² ≈ 1.62 раза
- На практике с учетом конструктивных ограничений: 1.4-1.5 раза
2.1.2 Лучшая эффективность на низких и средних оборотах
Анализ КПД:
Общий КПД двигателя η = η_электр × η_мех, где:
- η_электр = P_мех / (P_мех + P_потерь)
- Основные потери: омические (I²R), магнитные (гистерезис, вихревые токи), механические
Почему большой диаметр эффективнее:
- Меньшие омические потери при том же моменте:
M ~ I × D², поэтому для создания того же момента требуется меньший ток I
Потери в меди P_cu = I² × R уменьшаются квадратично
Сопротивление обмотки R = ρ × L_w / A_cu тоже оптимизируется - Лучшее охлаждение:
Большая площадь поверхности статора
Улучшенный теплоотвод от обмоток
Меньший перегрев при длительной работе - Оптимальная точка КПД смещается к средним оборотам:
η_max достигается при нагрузке 70-85% от максимальной
Большие двигатели проектируются для работы в этом диапазоне при крейсерском полете
2.1.3 Способность работать с большими винтами
Аэродинамическое обоснование:
Тяга винта определяется формулой:
T = C_T × ρ × n² × D_винт
где:
- C_T — коэффициент тяги (зависит от шага, формы лопастей)
- ρ — плотность воздуха
- n — частота вращения
- D_винт — диаметр винта
Крутящий момент на валу винта:
Q = C_Q × ρ × n² × D_винт
где C_Q — коэффициент момента
Критическая взаимосвязь:
- Большой винт требует большого момента при тех же оборотах
2.1.4 Более плавное и точное управление
Динамический анализ:
Уравнение движения двигателя:
J × dω/dt = M_электр - M_нагрузки - M_трения
где J — момент инерции ротора
Преимущества большого диаметра:
- Большая постоянная времени механической системы:
τ_мех = J / B, где B — коэффициент демпфирования
Более инерционная система лучше фильтрует высокочастотные помехи - Меньшая пульсация момента:
Большее число эффективных проводников в магнитном поле
Более равномерное распределение магнитного потока
Снижение когнитивного момента (cogging torque) - Лучшее разрешение управления:
Контроллер ESC работает с меньшими относительными изменениями тока
Более линейная характеристика M(I) в рабочем диапазоне
2.1.5 Предпочтительность для тяжелых БПЛА
Системные требования:
- Высокая тяговооруженность (T/W > 1.5 для тяжелых БПЛА)
T_треб = W × (T/W)
где W — взлетный вес - Стабильность при ветровых нагрузках:
Большие винты создают больше демпфирования
Высокий момент позволяет быстро компенсировать возмущения - Энергоэффективность на маршруте:
КПД 80-85% против 70-75% у малых двигателей
Экономия энергии 15-20% на одинаковую полезную нагрузку
2.2 Меньший диаметр статора (11-22 мм)
2.2.1 Выше максимальные обороты
Физические ограничения:
- Механические ограничения:
Центробежные силы: σ_центр ~ ω² × D²
При одинаковом материале максимальные ω ~ 1/D - Электрические ограничения:
Частота коммутации: f_ком = (n × N_p) / 120
Для ESC с максимальной f_ком = 100 кГц и N_p = 14:
n_max = (100000 × 120) / 14 ≈ 857,000 об/мин теоретически
Практически: 40-50 тыс. об/мин для малых двигателей
Конструктивные особенности малых двигателей:
- Более тонкие магнитные системы
- Меньшие воздушные зазоры (0.3-0.5 мм против 0.5-0.8 мм)
- Облегченные роторы с минимальной обоймой
2.2.2 Меньший вес и инерция
Анализ массы:
Масса активных материалов:
m_act ≈ ρ_Fe × V_Fe + ρ_Cu × V_Cu + ρ_mag × V_mag
где V ~ D² × L
Отношение массы к диаметру:
- Для геометрически подобных двигателей: m ~ D³
- На практике: m ~ D^2.5-2.8 из-за конструктивных особенностей
Момент инерции ротора:
J_rotor ≈ k × m × (D/2)² ~ D^4.5-5
где k — коэффициент формы (0.5 для сплошного цилиндра)
Преимущества малой инерции:
- Быстрее разгон/торможение: t_разгона = J × Δω / ΔM
В 2 раза меньший D дает в 5-6 раз меньшее J - Меньшие динамические нагрузки на раму
- Экономия энергии на маневрирование
2.2.3 Быстрее реакция на изменение тяги
Динамика системы двигатель-винт:
Передаточная функция системы:
G(s) = K / (τ_эл × s + 1)(τ_мех × s + 1)
где:
- τ_эл = L / R — электрическая постоянная времени
- τ_мех = J / (K_t × K_e / R + B) — механическая постоянная
Для малых двигателей:
- J меньше в 5-10 раз
- τ_мех меньше в 3-5 раз (0.005-0.01 с против 0.02-0.05 с)
- Полоса пропускания системы выше: 100-200 Гц против 20-50 Гц
На практике: реакция на команду от контроллера полета происходит за 10-20 мс вместо 50-100 мс.
2.2.4 Предпочтительность для гоночных дронов
Требования гоночных БПЛА:
- Максимальное угловое ускорение:
ε_max = ΔM / J
где ΔM — избыточный момент двигателя - Высокая частота корректировок:
Полетный контроллер работает на 4-8 кГц
Двигатель должен успевать отрабатывать команды - Минимизация гироскопического момента:
M_гир = J × ω × Ω
где Ω — угловая скорость крена/тангажа
Меньший J уменьшает мешающие моменты при маневрировании
3. Критическая взаимосвязь: диаметр статора и размер винта
3.1 Теоретическое обоснование соотношения
Аэродинамическая нагрузка винта:
Коэффициент мощности винта:
C_P = P / (ρ × n³ × D_винт⁵)
где P — потребляемая мощность
Мощность двигателя:
P_двиг = (π/30) × M × n
Приравнивая и упрощая:
M ~ n² × D_винт⁵
Момент двигателя:
M_двиг ~ D_статора² × L × B × I
Итоговое соотношение:
D_статора² ~ D_винт⁵ / (L × n²)
или
D_статора ~ D_винт^{2.5} / √(L × n²)
3.2 Практические правила выбора
Для трехлопастных винтов:
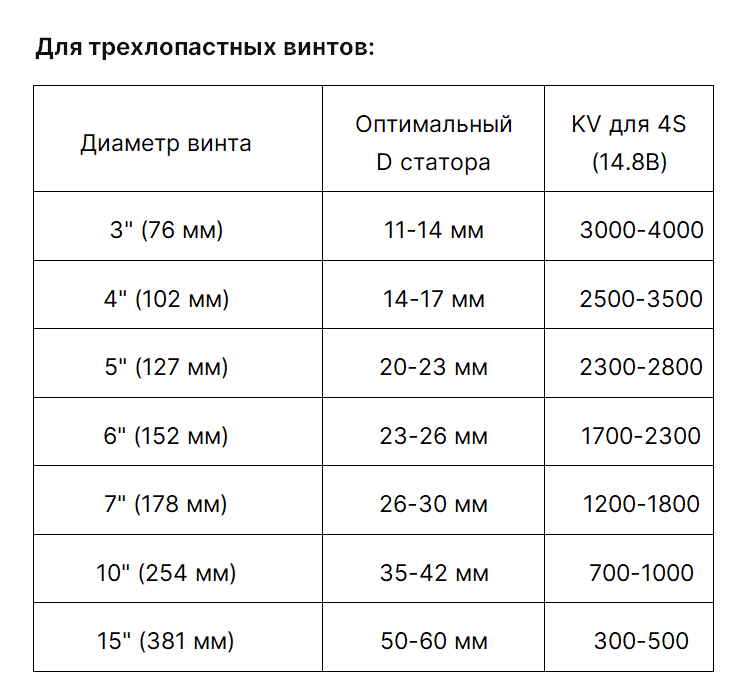
Поправочные коэффициенты:
- Для двухлопастных винтов: D_статора можно уменьшить на 15-20%
- Для четырехлопастных: увеличить на 10-15%
- Высокий шаг винта (более 4.5" для 5" винта): +10-15%
- Плотная компоновка (минимальные зазоры): +5-10%
3.3 Пример: двигатель 2207 и винты 5-6 дюймов
Практическое применение:
- С винтом 5" (127 мм):
Соотношение: 22/127 = 0.173
В диапазоне 0.15-0.20 для гоночных дронов
Характеристики: высокая динамика, умеренная эффективность - С винтом 6" (152 мм):
Соотношение: 22/152 = 0.145
Ближе к нижней границе (0.14-0.18 для кинодронов)
Характеристики: лучшая эффективность, меньшая динамика
Экспериментальные данные для 2207 2700KV на 4S:
4. Инженерные компромиссы и оптимизация
4.1 Оптимальное соотношение D/L (диаметр/высота)
Эмпирические правила:
- Для высоких оборотов: D/L = 3.0-4.0
Пример: 2207 → 22/7 = 3.14
Преимущество: низкая индуктивность, высокие обороты - Для высокого момента: D/L = 2.0-2.8
Пример: 2809 → 28/9 = 3.11 ( большой диаметр компенсирует)
Преимущество: высокий КПД на средних оборотах - Для максимальной эффективности: D/L = 2.5-3.2
Оптимальный баланс магнитных и электрических нагрузок
4.2 Влияние на тепловой режим
Уравнение теплового баланса:
P_потерь = P_выделения - P_отвода
где:
- P_выделения = I²R + P_магн + P_мех
- P_отвода = α × S × ΔT
Для разных диаметров:
- Площадь поверхности охлаждения S ~ D × L
- При одинаковой мощности потери, ΔT ~ 1/D
- Больший диаметр: на 20-30% лучше охлаждение при прочих равных
4.3 Экономические аспекты
Стоимость производства:
- Материалы: медь + магниты + сталь
Стоимость ~ D² × L
Увеличение D с 22 до 28 мм: стоимость ×1.6-1.8 - Точность изготовления:
Допуски относительные: ±0.02 мм для вала
Абсолютная точность важнее для малых диаметров - Выходной контроль:
Балансировка более критична для больших диаметров
Тестирование занимает больше времени
5. Перспективные разработки
5.1 Осевые (аксиальные) двигатели
Принцип: магниты и обмотки расположены в параллельных плоскостях
Преимущества для больших диаметров:
- Еще большее отношение момента к массе
- Плоская форма удобна для интеграции в конструкцию дрона
- Лучшее охлаждение
5.2 Модульные конструкции
Концепция: двигатель набирается из стандартных сегментов
- Диаметр изменяется дискретно: 22, 28, 35, 42 мм
- Унификация производства
- Гибкая настройка под задачи
5.3 Материалы будущего
- Аморфные металлы для сердечника:
Потери на вихревые токи в 10 раз меньше
Возможность увеличить частоту коммутации - Углеродные нанотрубки в обмотках:
Проводимость в 1000 раз выше меди
Плотность тока до 10⁹ А/см² - Термоэлектрическое охлаждение:
Интегрированные элементы Пельтье
Активный отвод тепла от горячих зон
Заключение
Диаметр статора бесколлекторного двигателя является фундаментальным параметром, определяющим не только моментные и мощностные характеристики, но и весь спектр летных качеств БПЛА. Квадратичная зависимость момента от диаметра делает этот параметр ключевым при проектировании силовой установки.
Выбор диаметра — это всегда компромисс между:
- Моментом и динамикой (большой D vs малый D)
- Эффективностью и отзывчивостью
- Размером винта и компактностью системы
- Стоимостью и производительностью
Понимание физических принципов, стоящих за этими компромиссами, позволяет инженерам и операторам БПЛА делать осознанный выбор, оптимальный для конкретных задач — будь то скоростные гонки, плавная аэросъемка или транспортировка грузов.