
Бесколлекторные двигатели (BLDC - BrushLess Direct Current) являются сердцем современных беспилотных летательных аппаратов (БПЛА). Их конструкция напрямую определяет летные характеристики, эффективность и надежность дрона. В данном уроке, мы попробуем детально разобраться с влиянием ключевых параметров двигателя и их взаимосвязь с эксплуатационными характеристиками БПЛА.
Даже если вы понимаете о чем идет речь, на этой неделе Вы узнаете много интересного.
Диаметр статора (D) - Основной определяющий параметр
Физическая сущность
Диаметр статора (часто обозначаемый как D в спецификации, например, это будут первые 2 цифры в обозначении 2207, что означает диаметр 22 мм) определяет крутящий момент и мощность, которые может развить двигатель.
Влияние на полетные характеристики:
- Больший диаметр (28-55 мм):
Выше крутящий момент при тех же оборотах
Лучшая эффективность на низких и средних оборотах
Способность работать с большими винтами
Более плавное и точное управление
Предпочтительны для тяжелых БПЛА, кинодронов, промышленных платформ - Меньший диаметр (11-22 мм):
Выше максимальные обороты
Меньший вес и инерция
Быстрее реакция на изменение тяги
Предпочтительны для гоночных дронов, микробеспилотников
Высота статора (H) - Параметр, определяющий мощность
Физическая сущность
Высота статора (второй блок цифр в спецификации (3 и 4 символ), например "07" в обозначении 2207 означает высоту 7 мм) определяет количество меди в обмотках и, соответственно, максимальную мощность и токовые характеристики.
Влияние на полетные характеристики:
- Большая высота (высокие цифры, 6.5-9.5 мм):
Выше максимальная мощность и тяга
Больший рабочий ток и тепловыделение
Выше потребление энергии
Предпочтительны для динамичных полетов, акробатики, быстрого набора высоты - Меньшая высота (низкие цифры, 3-6 мм):
Выше эффективность на крейсерских режимах
Меньшее тепловыделение
Увеличенное время полета
Предпочтительны для длительных полетов, аэросъемки, наблюдения
Количество полюсов (магнитов) - Параметр управления
Физическая сущность
Количество магнитных полюсов (постоянных магнитов ротора) и соответствующих им катушек в статоре определяет частоту коммутации и плавность работы.
Типичные конфигурации:
- 12N14P (12 катушек, 14 магнитов) - наиболее распространенная
- 9N12P - проще в производстве, менее плавная работа
- 18N21P и более - высокая плавность, сложнее в производстве
Влияние на полетные характеристики:
- Больше полюсов:
Выше плавность вращения и точность позиционирования
Меньше крутящий момент на низких оборотах
Сложнее для контроллера (ESC) на высоких оборотах
Меньше вибраций и акустического шума - Меньше полюсов:
Проще управление на высоких оборотах
Выше максимальные обороты при прочих равных
Ниже стоимость производства
Больше вибраций и шума
Практическое правило:
Для гоночных дронов предпочтительны двигатели с меньшим количеством полюсов для высоких оборотов. Для съемочных и промышленных - с большим количеством для плавности.
Количество лучей (лопастей) стартера - Параметр надежности
Физическая сущность
Конструкция крепления винта (количество лучей и их форма) влияет на жесткость, виброустойчивость и надежность крепления.
Распространенные конфигурации:
- 3 луча - минимальный вес, достаточно для небольших двигателей
- 4 луча - оптимальный баланс жесткости и веса
- 5-6 лучей - максимальная жесткость, для мощных двигателей
Влияние на полетные характеристики:
- Больше лучей:
Лучшее распределение нагрузки
Меньше деформация при затягивании винта
Меньше вибраций от дисбаланса
Больший вес и стоимость - Меньше лучей:
Меньший вес
Проще производство
Риск деформации при сильной затяжке
Недостаточная жесткость для мощных двигателей
Критический аспект:
Качество обработки поверхности лучей напрямую влияет на балансировку двигателя. Неровности вызывают вибрации, ухудшающие качество съемки и надежность.
Дополнительные технические факторы, влияющие на эксплуатацию
5.1 Тип и качество подшипников
- Керамические подшипники:
Выше стойкость к перегреву
Меньше трение, выше КПД
Долговечнее в условиях загрязнения
Существенно дороже - Стальные подшипники:
Достаточная надежность для большинства применений
Ниже стоимость
Чувствительны к перегреву и загрязнению
5.2 Материал и конструкция магнитов
- N52H, N54H - высокотемпературные неодимовые магниты
- Крепление магнитов - клеевые составы должны выдерживать центробежные силы
- Температурная стабильность - определяет потерю магнитных свойств при нагреве
5.3 Конфигурация обмоток (Winding)
- Количество витков - определяет KV двигателя
- Толщина провода - определяет максимальный ток
- Схема соединения (звезда/треугольник) - влияет на KV и моментные характеристики
5.4 Термическое проектирование
- Охлаждающие каналы в корпусе
- Теплопроводящие материалы
- Рабочая температура - критический параметр для долговечности
5.5 Класс защиты от окружающей среды
- IP-рейтинг (Ingress Protection)
- Антикоррозионные покрытия
- Пыле- и влагозащита особенно важна для сельскохозяйственных и промышленных БПЛА
Взаимосвязь параметров и оптимизация под задачи
Для гоночных дронов:
- Приоритет: максимальное отношение тяги к весу
- Параметры: малый диаметр (20-23 мм), средняя высота (5-7 мм), низкое количество полюсов
- KV: 2300-2700 для 5" винтов
- Особенности: максимальное охлаждение, керамические подшипники
Для съемочных дронов:
- Приоритет: плавность, эффективность, низкий шум
- Параметры: средний диаметр (24-28 мм), малая высота (4-6 мм), высокое количество полюсов
- KV: 800-1200 для больших винтов
- Особенности: виброизоляция, точная балансировка
Для тяжелых промышленных БПЛА:
- Приоритет: надежность, момент на низких оборотах
- Параметры: большой диаметр (30-55 мм), высокая высота (8-12 мм)
- KV: 300-600 для винтов 15-30 дюймов
- Особенности: высокая степень защиты, температурная стабильность
Методика выбора двигателей для конкретной задачи
Алгоритм выбора:
- Определение веса БПЛА и требуемой тяги (тяговооруженность 2:1 для акробатики, 1.5:1 для съемки)
- Выбор размера винта исходя из задач и габаритов
- Подбор диаметра статора под выбранный винт
- Определение высоты статора исходя из требуемой мощности
- Выбор KV в зависимости от напряжения батареи и требуемых оборотов
- Уточнение других параметров под конкретные условия эксплуатации
Таблица для гоночных дронов (высокие обороты)
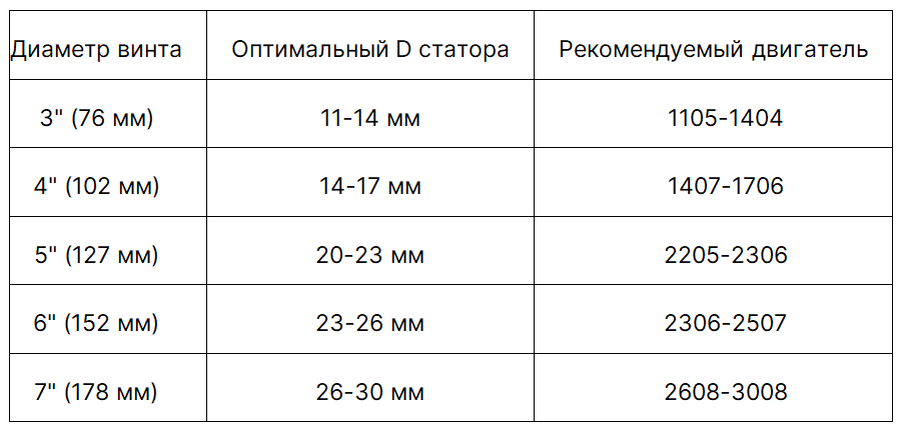
Таблица для кинодронов (низкие обороты, высокая эффективность)
Заключение
Выбор бесколлекторного двигателя для БПЛА представляет собой сложную оптимизационную задачу, требующую учета множества взаимосвязанных параметров. Диаметр и высота статора определяют базовые мощностные характеристики, количество полюсов влияет на качество управления, а конструктивные особенности (лучи стартера, подшипники, материалы) - на надежность и долговечность.
Современные тенденции показывают движение в сторону специализации двигателей под конкретные задачи: от сверхлегких высокооборотных для гонок до мощных и плавных для профессиональной съемки. Понимание взаимосвязи конструктивных параметров и летных характеристик позволяет инженерам и операторам БПЛА делать осознанный выбор, оптимизируя свои системы под конкретные эксплуатационные требования.
Дальнейшее развитие будет идти по пути интеграции, интеллектуализации и адаптивности, превращая двигатель из простого исполнительного устройства в интеллектуальный узел летательного аппарата.
Дальше мы подробно разберем все разделы , что бы осталось меньше белых пятен.