
Исследователи из Делфтского технического университета разработали новый алгоритм, позволяющий группе автономных дронов совместно поднимать и транспортировать тяжелые грузы в сложных условиях.
Основная проблема, которую решает разработка, заключается в ограниченной грузоподъемности одиночного дрона, что затрудняет их использование для доставки строительных материалов в удаленные районы, перевозки урожая в горной местности или в спасательных операциях.
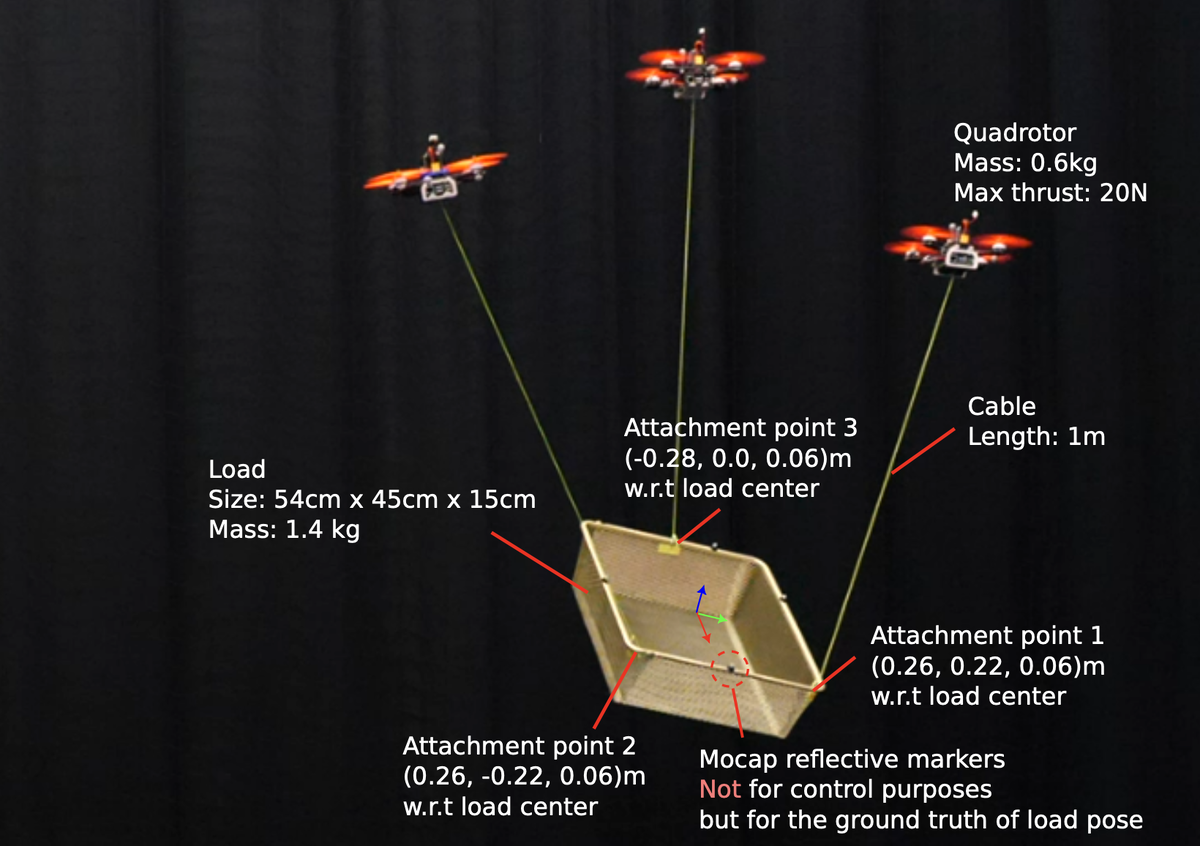
Новая система преодолевает эти ограничения: несколько дронов соединяются с полезным грузом при помощи тросов, что позволяет им переносить значительно более тяжелые объекты. Регулируя свое положение в реальном времени, дроны могут не только поднимать и перемещать груз, но и контролировать его ориентацию, что критически важно для точного размещения в сложной обстановке.
Ключевым достижением стала координация аппаратов. Как пояснил исследователь Сихао Сун, когда дроны физически соединены, они должны реагировать друг на друга и на внешние возмущения, такие как внезапные движения груза.
Традиционные алгоритмы управления для этого слишком медленны и негибки. Разработанный алгоритм, в отличие от существующих, является быстрым, адаптивным и надежным. Он адаптируется к изменяющимся нагрузкам и компенсирует внешние воздействия без необходимости установки датчиков на самом грузе, что является важным преимуществом для практического применения.
В ходе экспериментов разработанная система продемонстрировал как минимум восьмикратное превосходство в ускорении по сравнению с современными методами при выполнении маневренных траекторий. В настоящее время система использует внешние камеры захвата движения для тестов в помещении и еще не готова для работы на открытом воздухе.
В будущем технология может быть применена в поисково-спасательных работах, сельском хозяйстве и строительстве в труднодоступных местах. Все испытания системы прошли успешно. Поскольку дроны являются автономными, им достаточно указать пункт назначения, после чего они самостоятельно прокладывают маршрут, адаптируясь к препятствиям и внешним помехам.