Большие дроны, в отличие своих компактных собратьев, способны нести существенный вес, что открывает доступ к тяжелому, но куда более совершенному оборудованию, такому как высококачественные цифровые камеры. Они обеспечивают несравнимое качество изображения: высокое разрешение, исключительную детализацию даже в условиях слабого освещения. Кроме того, подключение специализированных камер — тепловизоров, мультиспектральных или гиперспектральных датчиков — превращает дрон в мощный инструмент для различных задач.
Сегодня мы попробуем подключить на нашу тестовую сборку гексакоптера камеру с дрона "Сибирячок".
Цифровые камеры с подвесом в основном имеют схожий принцип подключения и для начала нам требуется рассмотреть имеющиеся разъемы на камере.
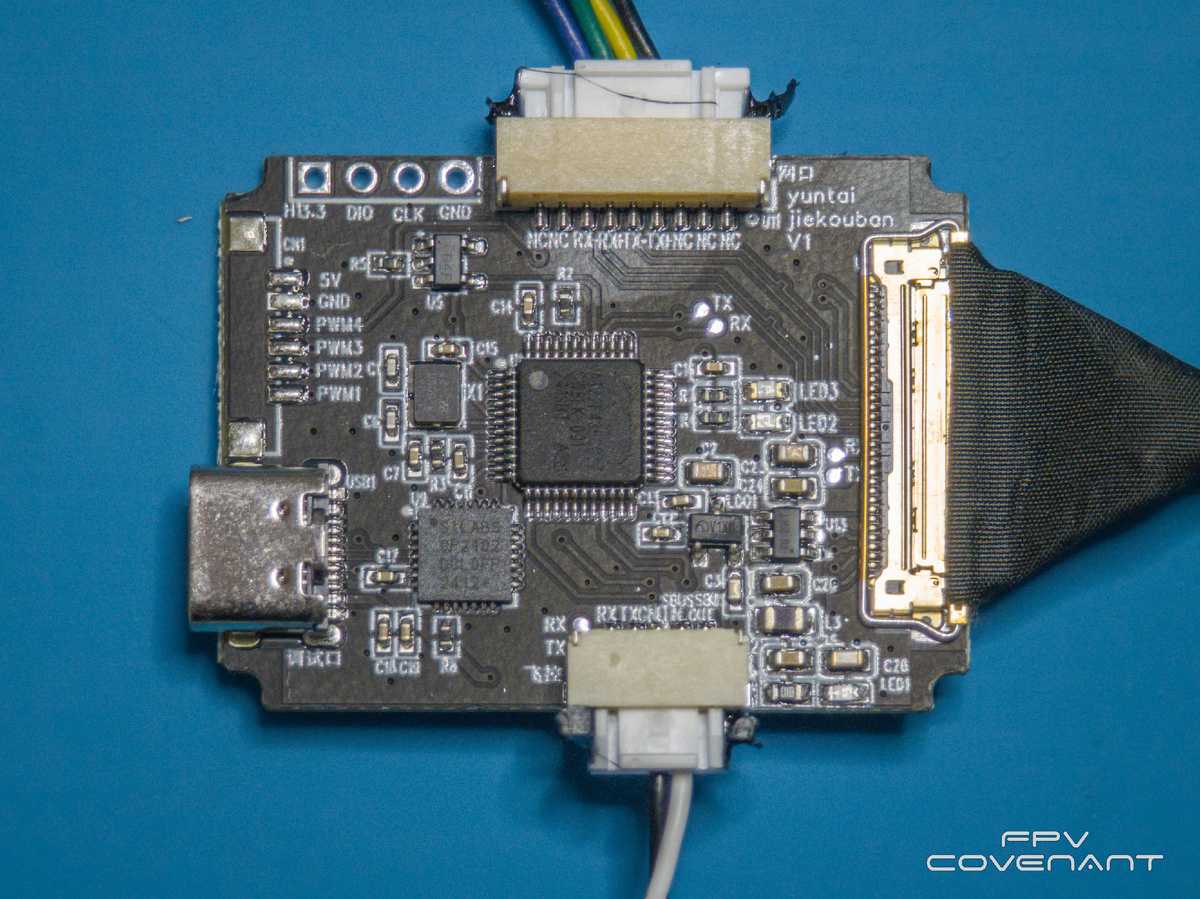
В нашем случае камера имеет два модуля с тремя разъемами: разъем для подключения к интерфейсу Ethernet (как правило имеет контакты RX-, TX-, RX+, TX+), разъем управления камеры UART/SBUS ( Uart имеет контакты RX, TX и GND. SBUS можно определить по контактам SBUS in, SBUS out) и разъем питания.
При включении камеры, подвес должен принять центральное положение, исходя из данных калибровки. Нам потребуется подвесить оборудование перед включением.
Для начала нарисуем кронштейн для гексакоптера "Вампир" для печати на 3D принтере.
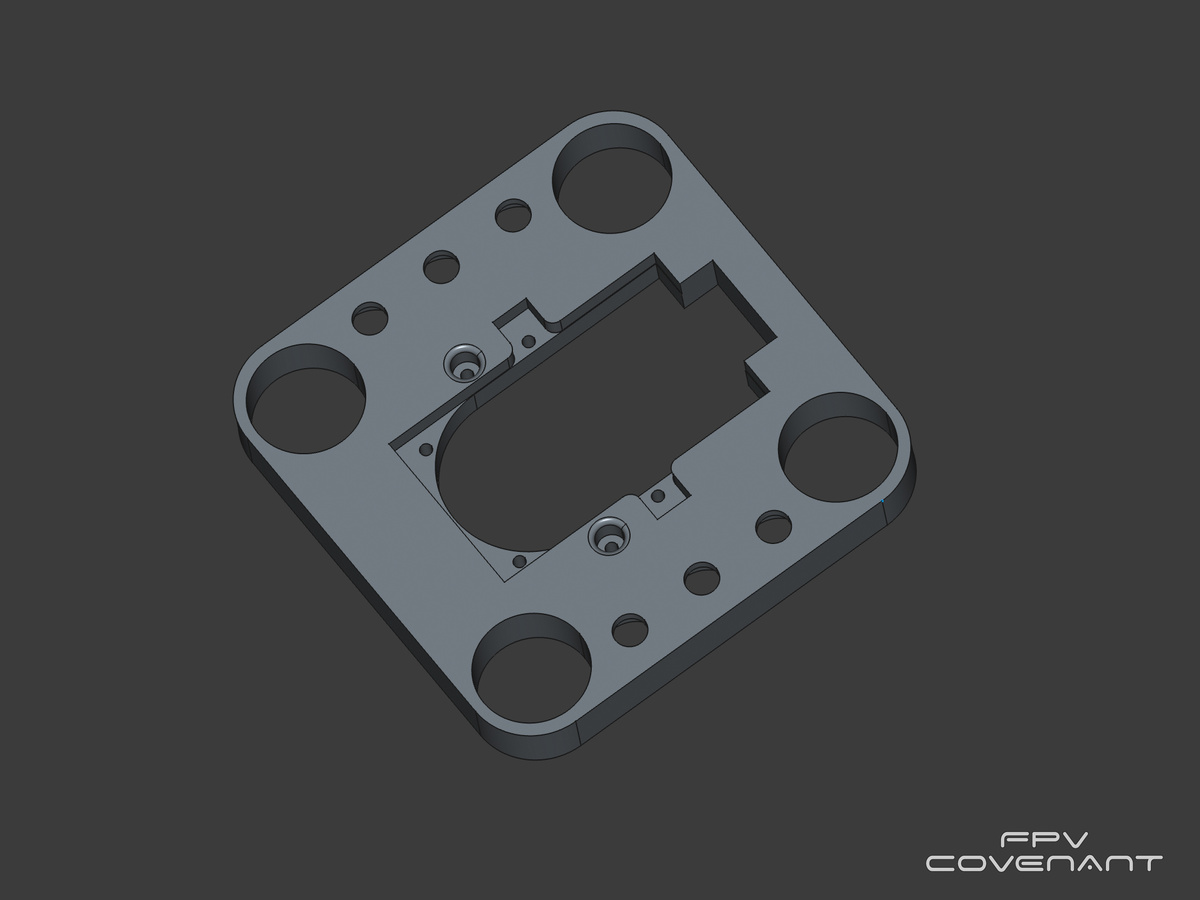
Верхняя часть подвеса состоит из двух модулей, которые будут крепиться к кронштейну с помощью винтов м2x10.
Печатаем и пробуем собрать. Для сглаживания мелких вибраций нам потребуется установить 6 демпферов подвеса.
В собранном виде получилось так.
Крепление к раме гексакоптера осуществляется на 4 алюминиевых стойках 45-50 мм.
Наша система отлично закреплена! Переходим к подключению.
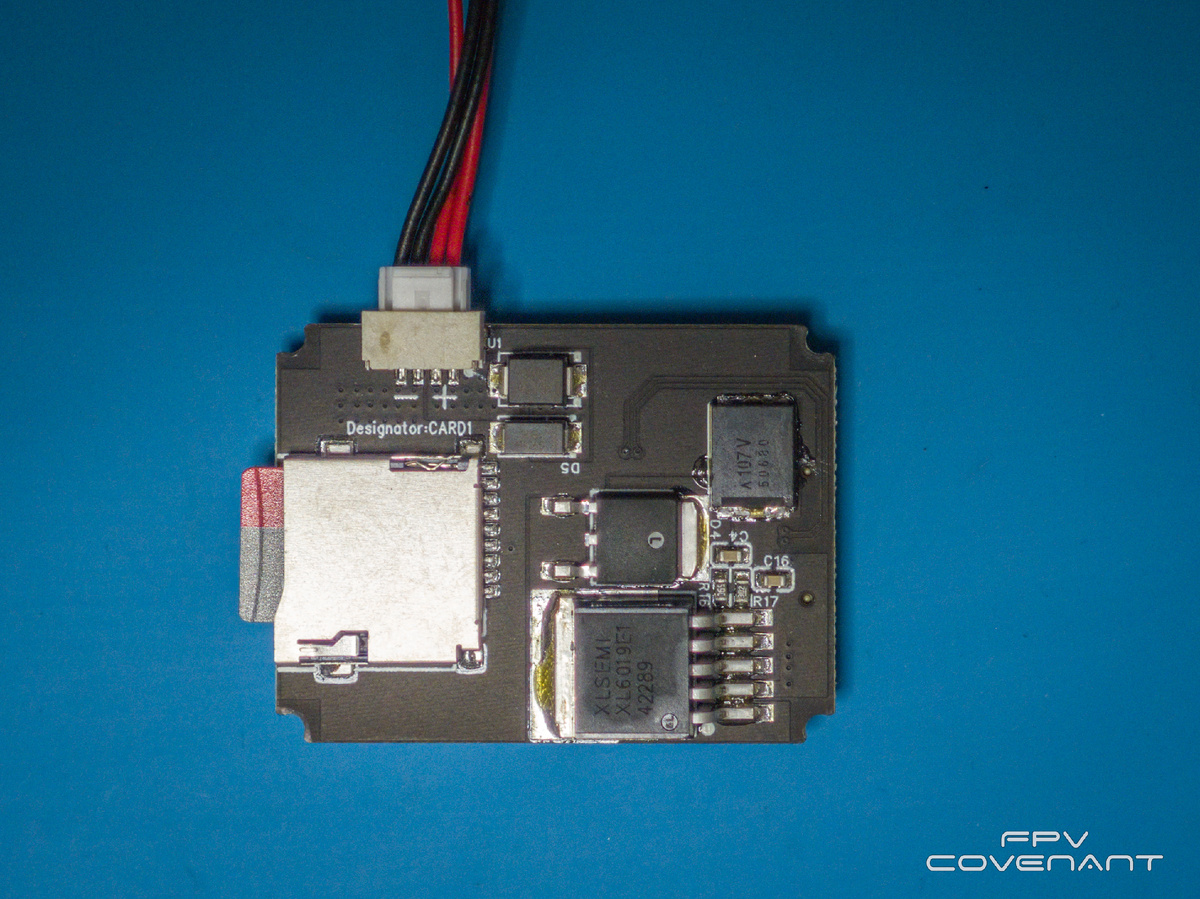
Для начала нам потребуется изготовить кабель питания.
Для работоспособности требуется минимум 12 В 1А.
Паяем провод для подключения к модулю распределения питания.
Для подключения нам потребуется использовать разъем 12 В на модуле понижения питания 5/12В.
Далее нам потребуется изготовить Ethernet кабель для подключения к системе управления БПЛА (Herelink, Siyi) согласно распиновки юнитов.
Мы для начала распаяем кабель с разъемом RG45. Посмотрим какой же у нее IP адрес и проверим работоспособность.
Подключаем питание от лабораторного блока питания.
Включаем компьютер и настраиваем IP адрес 192.168.144.3 с маской 255.255.255.0.
Проверим доступность камеры в нашей маленькой сети с помощью программы Advanced IP Scanner. Для этого вводим диапазон сканирования 192.168.144.1 - 192.168.144.255.
Как мы видим в нашей сети есть два устройства 192.168.144.3 - наша рабочая станция и 192.168.144.108 - камера. Нам очень повезло, если бы камера на этом этапе не высветилась - значит либо неправильно был спаян провод, либо камера неисправна, либо настроена на адрес другого диапазона сети.
Теперь самое интересное, мы можем проверить работоспособность камеры. для этого мы можем использовать программу VLC и вставить адрес потока камеры, либо приложение для управления Ground End.
Адреса для получения потока для этой камеры:
для обычной - rtsp://192.168.144.108/stream/live?dev=0
для тепловизора - rtsp://192.168.144.108/stream/live?dev=1
Загружаем приложение Ground End. Заходим в настройку и нажимаем Connect. Закрываем окошко настроек.
Мы видим изображение полученное с камеры. Подключение произведено правильно.
Тут мы можем крутить камерой в разные стороны, увеличивать изображение (Zoom), померить температуру ноги, переключаться на тепловизор и использовать кучу разных функций.
Убедившись, что камера исправна подключаем ее напрямую к юниту, в нашем случае Herelink.
Так как у нас нет пульта управления Herelink, мы будем использовать для подключения к дрону нашу НСУ, о сборке которой мы рассказывали ранее:
Подключаем нашу станцию управления к компьютеру и включаем дрон. Сопряжение происходит автоматически.
Снова проверим нашу сеть с помощью Advanced IP Scanner. Для этого вводим диапазон сканирования 192.168.144.1 - 192.168.144.255. Нажимаем сканировать.
Мы видим что добавились два устройства 192.168.144.10 и 192.168.144.11 - это наши юниты Herelink наземный и воздушный модуль. Все отлично.
Снова загружаем программу для управления камерой и запускаем поток с камеры.
Теперь мы видим изображение переданное через систему связи Herelink.
Мы можем использовать решение состоящее из двух компьютеров и наземной станции управления соединенных между собой с помощью роутера.
В таком исполнении один оператор за одним компьютером контролирует полет и карту, второй за вторым компьютером видит изображение с камеры и осуществляет управление подвесом.
Далее мы попробуем получить изображение в Mission Planner с помощью GStreamer. Рабочий Pipeline для этой камеры:
rtspsrc location=rtsp://192.168.144.108/stream/live?dev=0 latency=41 udp-reconnect=1 timeout=0 do-retransmission=false ! application/x-rtp ! decodebin ! queue max-size-buffers=1 leaky=2 ! videoconvert ! video/x-raw,format=BGRA ! appsink name=outsink sync=false
Забыли выложить модель нашего кронштейна, скачать можно тут.
Можно поставить лайк, если наша статья оказалась полезной или оформить премиум подписку, нам тоже будет приятно!