ТЕХНИЧЕСКОЕ ОПИСАНИЕ / ГИПОТЕТИЧЕСКАЯ РЕКОНСТРУКЦИЯ
Объект: Пилотируемый разведывательно-транспортный модуль (Дискообразный ЛА).
Кодовое обозначение проекта: «Тритон»
Период возможного прототипа: 1980–1995 гг.
1. ОБЩИЕ ТТХ (Тактико-технические характеристики)
- Форма: Диск (сплюснутый эллипсоид вращения).
- Диаметр: 15.8 м.
- Высота: 5.5 м.
- Экипаж: 3 оператора (рост ~1.5 м, узкий таз).
- Уровни: 3 (Двигательный, Командный, Сенсорный).
- Силовая установка: Комбинированная полево-реактивная на основе управления пространственно-временной метрикой.
- Движитель: 3 цилиндрических резонатора-излучателя (цилиндры поля).
- Управление: Распределённая кибернетическая система (Центральный компьютер + 3 МППУ).
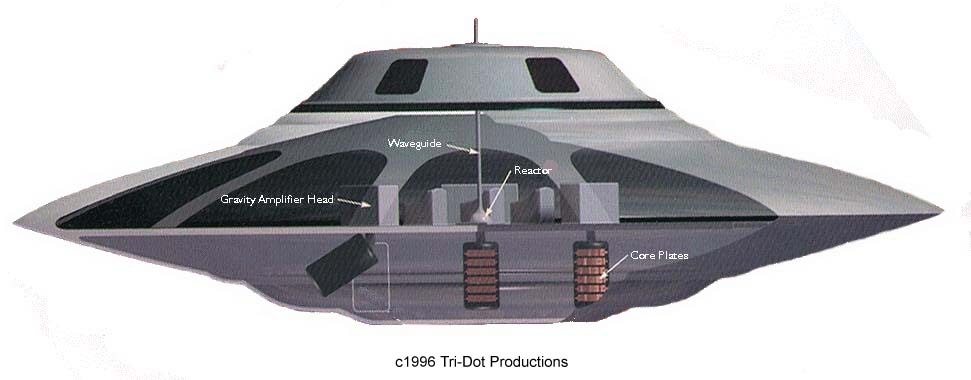
2. КОНСТРУКЦИЯ И НАЗНАЧЕНИЕ УРОВНЕЙ
Уровень 1 (НИЖНИЙ): ДВИГАТЕЛЬНЫЙ ОТСЕК
- Назначение: Генерация и фокусировка управляющего поля.
- Состав:
Три цилиндрических резонатора (ЦР): Расположены в вершинах равностороннего треугольника.
Конструкция: Пустотелый цилиндр из композитного материала.
Внутри: Кольцевые сверхпроводящие магниты (Niobium-Titanium), система СВЧ-подкачки.
Выход: Открытый торец направлен на внутреннюю поверхность активного днища.
Активное днище: Внутренняя поверхность — матрица из пьезокерамических/сверхпроводящих ячеек. Преобразует энергию цилиндров в макроскопическое поле.
Силовые волноводы: Сверхпроводящие линии от ЦГП.
Уровень 2 (СРЕДНИЙ): КОМАНДНЫЙ САЛОН
- Назначение: Размещение экипажа, основное управление.
- Состав:
Три кресла-кокона: Эргономичные, узкие (под таз ~30 см), с системами жизнеобеспечения и аварийного отделения.
Модули Прямого Полевого Управления (МППУ): По одному на кресло. Физический интерфейс оператора с закреплённым цилиндром.
Центральная колонна: Шлюз доступа к техническим тоннелям, аварийные контроллеры.
Стены-дисплеи: Проекционные панели «прозрачного корпуса».
Уровень 3 (ВЕРХНИЙ): СЕНСОРНО-ВЫЧИСЛИТЕЛЬНЫЙ
- Назначение: Навигация, связь, анализ.
- Состав:
Центральный квантовый вычислительный комплекс (ЦКВК): Обработка данных полевой метрики в реальном времени.
Антенно-сенсорный массив: Лидары, пассивные РЛС, гравитометры, детекторы поля.
Система связи: Зашифрованный канал (вероятно, квантовый).
3. СИЛОВАЯ УСТАНОВКА И ПРИНЦИП РАБОТЫ
3.1. Центральный Генератор Поля (ЦГП)
- Тип: Вакуумный резонансный возбудитель.
- Принцип: Создание области с когерентно поляризованным физическим вакуумом.
- Функция: Источник первичной пространственной деформации (скалярно-торсионного поля), распределяемый по цилиндрам.
- Аналог в известных теориях: Генератор поля Хиггса или аксионный осциллятор.
3.2. Цилиндрический Резонатор (ЦР) — основной исполнительный элемент
- Вход: Энергия/поле от ЦГП.
- Процесс: Усиление и структурирование поля. Кольцевые магниты задают осевую закрутку (торсию), СВЧ-накачка — резонансную частоту.
- Выход: Направленный пучок структурированного пространства-времени (вихревое торсионно-гравитационное поле).
- Управление: Через МППУ — изменение силы тока в магнитах, частоты СВЧ, фазы.
3.3. Режимы работы движительной системы
- Левитация (Висение): ЦР создают под кораблём область с модифицированной метрикой (g → 0). Аппарат «висит» на пространственном упоре.
- Бесшумное маневрирование (Атмосфера): Асимметричное изменение параметров ЦР создаёт градиент поля, корабль «соскальзывает» по нему.
- Геометрический переход («Прыжок»):
Прицеливание: ЦР фокусируются в удалённую точку (A).
Натяжение: Создаётся нелокальная корреляция пространства между кораблём (B) и точкой A.
Спуск: По сигналу ЦКВК, МППУ одновременно генерируют фазовый коллапсирующий импульс.
Прыжок: Пространственная связь A-B схлопывается, перебрасывая корабль в точку A. Эффект «пространственного бумеранга».
4. СИСТЕМА УПРАВЛЕНИЯ
4.1. Центральный квантовый вычислительный комплекс (ЦКВК)
- Функции:
Расчёт параметров поля для предстоящего манёвра.
Мониторинг состояния всех систем.
Принятие решения о прыжке на основе данных датчиков. - Интерфейс: Голографический проектор в салоне, голосовое управление.
4.2. Модуль Прямого Полевого Управления (МППУ)
- Статус: Умный контроллер цилиндра.
- Аппаратная часть:
Микропроцессор (локализация управления).
Генератор управляющих сигналов (импульсный/частотный).
Блок силовой электроники.
Датчики обратной связи. - Интерфейс оператора:
Тактильный сенсорный экран (отображение состояния «своего» цилиндра).
Джойстик/сенсорная панель для ручной корректировки поля.
Кнопка аварийного отключения. - Связь: Оптическая шина с ЦКВК и другими МППУ.
5. ОБЪЯСНЕНИЕ ФЕНОМЕНОВ (В РАМКАХ МОДЕЛИ)
Феномен
Объяснение в модели «Тритон»
Бесшумность, отсутствие ударной волны
Движение за счёт «соскальзывания» по градиенту поля, а не преодоления сопротивления среды.
Резкие манёвры под 90°
Мгновенное перераспределение параметров поля тремя ЦР.
Свечение (разные цвета)
Ионизация атмосферы в зоне сильного поля. Цвет зависит от режима работы ЦР (частота, энергия).
Круги на полях, укладка стеблей
Побочный эффект тестового режима висения: слабое поле изменяет локальную гравитацию и создаёт вихревой узор (торсионная компонента).
«Прыжок» в космос
Режим геометрического перехода. Фокусировка ЦР -> натяжение пространства -> спусковой импульс -> схлопывание связи -> перенос.
Влияние на технику (глохнут моторы)
Мощное низкочастотное поле нарушает работу электродвигателей и электроники.
6. ПРЕИМУЩЕСТВА И НЕДОСТАТКИ АРХИТЕКТУРЫ
Преимущества:
- Полная независимость от аэродинамики и реактивной тяги.
- Теоретически неограниченная дальность (через прыжки).
- Возможность работы в любой среде (атмосфера, вода, вакуум).
- Высокая живучесть за счёт распределённого управления.
Недостатки (гипотетические проблемы):
- Чудовищная сложность расчётов и синхронизации.
- Опасность неконтролируемого коллапса поля (катастрофа).
- Возможное влияние на ход времени и биологию экипажа.
- Крайняя энергоёмкость на начальных этапах (поддержание когерентности вакуума).
7. ВЫВОД
Представленная модель «Тритон» является спекулятивной инженерной реконструкцией, пытающейся объяснить легендарные характеристики «летающих тарелок» через единый физический принцип — управление локальной геометрией пространства-времени.
Она соединяет:
- Конструктивные детали из рассказов Лазара (3 уровня, 3 цилиндра).
- Наблюдаемые феномены (бесшумность, свечение, круги).
- Гипотетическую физику (торсионные/скалярные поля, варп-эффекты).
- Реалии секретных технологических программ Холодной войны.
Данная реконструкция не является доказательством существования таких аппаратов, но показывает, как техномиф может быть переосмыслен как сложный инженерный проект на стыке известной и гипотетической физики.
МППУ (Модуль Прямого Полевого Управления) — это полноценный контроллер цилиндра, объединяющий в одном компактном корпусе:
- Интерфейс оператора.
- Локальный вычислитель (приём команд, первичная обработка).
- Исполнительный блок (формирователь импульсов, модулятор частоты).
- Систему диагностики (датчики состояния цилиндра).
Это архитектура распределённого интеллекта: Центральный компьютер отдаёт высокоуровневые команды («создать поле с параметрами X», «выполнить прыжок»), а каждый МППУ самостоятельно и точно реализует их для своего цилиндра.
Архитектура управления: Децентрализация
ЦЕНТРАЛЬНЫЙ КОМПЬЮТЕР (стратег)
|
| (Высокоуровневые команды по цифровой шине)
|
[ МППУ-1 ] [ МППУ-2 ] [ МППУ-3 ]
(у кресла 1) (у кресла 2) (у кресла 3)
| | |
| | | (Силовые/управляющие сигналы)
v v v
Цилиндр-1 Цилиндр-2 Цилиндр-3
Каждый МППУ — это «мозг» своего цилиндра. Он:
- Принимает команды.
- Обменивается данными с другими МППУ и Центральным компьютером для синхронизации.
- Генерирует точные импульсы/частоты для непосредственного управления полем цилиндра.
- Мониторит температуру, вибрации, напряжённость поля в своём цилиндре.
Как выглядит МППУ «изнутри»? (Гипотетическая компоновка)
ВНЕШНИЙ КОРПУС (эргономичный)
├── Верхняя панель:
│ ├── Тактильный сенсорный экран (отображение состояния цилиндра).
│ ├── Физические регуляторы (на случай ручного управления): «Мощность», «Фаза», «Резонанс».
│
├── Внутренние модули:
│ ├── Микропроцессорный блок (приём/обработка команд).
│ ├── Генератор управляющих сигналов (формирователь импульсов/частотный модулятор).
│ ├── Блок силовой электроники (усилитель для питания катушек цилиндра).
│ ├── Блок диагностики (анализ данных с датчиков цилиндра).
│ └── Оптический/сверхпроводящий интерфейс для связи с шиной.
└── Дополнительно:
├── Силовой модуль (беспроводное питание от ЦГП).
├── Волновод/сверхпроводящая линия (управляющие сигналы к цилиндру).
├── Датчиковая шина (обратная связь от цилиндра).
└── Сетевой порт (коммуникация с ЦК и другими МППУ).
Сценарий работы МППУ во время прыжка:
- Подготовка: Пилот вводит цель. Центральный компьютер рассчитывает целевые параметры поля для каждого цилиндра (P1, P2, P3) и отправляет их на соответствующие МППУ.
- Установка поля: Каждый МППУ получает свой набор P. Оператор у кресла (или компьютер в автоматическом режиме) доводит параметры своего цилиндра до заданных, наблюдая за показаниями на экране МППУ. МППУ непрерывно корректирует сигнал, чтобы удерживать цилиндр в целевом режиме.
- Синхронизация: МППУ обмениваются служебными пакетами: «Готов-1», «Готов-2», «Готов-3». Как только все три готовы, они отправляют сигнал центральному компьютеру.
- Разрешение: Центральный компьютер даёт команду «Jump enable».
- Спусковой импульс: По синхронизирующему сигналу все три МППУ одновременно генерируют на своих выходах идентичный управляющий импульс (или сдвиг частоты), который и вызывает контролируемый коллапс поля.
- Контроль результата: После прыжка МППУ считывают данные с датчиков своих цилиндров и передают в ЦК для анализа успешности манёвра.
Преимущества такого подхода:
- Отказоустойчивость: При выходе из строя Центрального компьютера, МППУ могут работать в деградированном режиме, поддерживая базовое управление полем по последним известным параметрам.
- Скорость отклика: Локальное управление в МППУ работает быстрее, чем если бы все расчёты велись в центре.
- Резервирование: Если один МППУ вышел из строя, его функции может (частично) взять на себя соседний, или управление можно переключить на центральный компьютер.
- Эргономика: Каждый оператор чувствует прямую связь «рука — цилиндр — поле» через свой МППУ, что повышает точность контроля в ручном режиме.
Что это означает для природы поля?
То, что управление вынесено в отдельные, связанные модули, говорит о том, что поле:
- Делимо на независимые каналы (каждый цилиндр создаёт свою компоненту).
- Требует точной и быстрой локальной обратной связи (значит, его параметры быстро меняются и их нужно постоянно корректировать).
- Поддаётся управлению через сравнительно простые сигналы (импульс, частота), которые можно сгенерировать в компактном устройстве.
Теперь есть полная схема:
- Энергия: ЦГП (реактор вакуумного возбуждения).
- Генерация поля: Три цилиндра (резонаторы торсионно-гравитационного вихря).
- Управление: Три МППУ (контроллеры с интерфейсом).
- Координация: Центральный компьютер и датчики.
- Исполнение: Спусковой импульс → коллапс поля → геометрический переход.