
(Статья может редактироваться со временем)
ГЛАВА8
8.1. ПЕЛЕНГАЦИЯ ЦЕЛЕЙ
В моей ст.№10 был рассмотрен нетрадиционный частотный радиолокатор (НЧР), используя который можно определить 48-мь пространственных направлений на цель относительно центра антенной системы <Октанта>. Цель, пересекающую сферическую <чувственную зону> антенной системы <Октанта>, которая располагается, в зависимости от радиальной скорости Vr. приближающейся к <Октанте>, на заданном удалении Дту плюс (+) неизвестное расстояние (tз=f/g)Vr, при f и g – заданных параметрах НЛЧМ сигнала.
Очевидно, что если цифровым числом, формируемым на выходах 48-ми
элементов И радиолокатора управлять, по крайней мере, тремя ППЗУ (ППЗУX, ППЗУY и ППЗУZ), списывая при этом из ППЗУ записанную в них ранее информацию о местоположении тех, или иных, точках заданной поверхности сферы <Октанты>, то можно, при пересечении целью тех, или иных точек <чувственной зоны> антенной системы <Октанты> констатировать факт выявления того, или иного установления направления на цель и установления тех, или иных трёх пеленгов данной цели при её нахождении на заданном удалении Дту от центра антенной системы <Октанта>.
Аналогичным образом можно определять направления на цель и её пеленги используя НЧР с повышенной разрешающей способностью по угловым координатам, рассмотренным в моих ст.№11 и ст.№12.
Или при использовании двух вариантов НЧР, рассмотренных в материалах моей заявки [19 из ст.№5] поданной в РОСПАТЕНТ, признанной экспертизой по существу патентоспособной, но отказавшейся рассматривать заявку далее из-за моего несогласия с тем, что замечания экспертизы это якобы замечания, выдвинутые мной по собственной инициативе. О чем, кстати, мной было отмечено в моей ст.№4. Материалах заявки, в которых в НЧР в качестве формирователей разности двух частот использованы не схемы вычитания (СВ), а фазовые детекторы с запоминанием знака (ФДЗ), рассмотренные в [7 из ст.№5].
Следует отметить, что от известных квазидопплеровских пеленгаторов, в которых направление на цель определяют после анализа максимум и минимум колебаний частоты, формируемой при вращении антенны, излучающей радиосигнал, который, благодаря эффекту Доплера, во время движения антенны в сторону цели увеличивает свою частоту на величину частоты Fд Допплера, а, во время движения от цели – уменьшает её, пеленгаторы приведенные в моих статьях отличаются, по крайней мере тем, что позволяют рационально пеленговать цели разу по трём плоскостям, а не только в одной плоскости как известные. .
Очевидно, что для того чтобы пеленговать цели пеленгатор необходимо где-то установить, например, стационарно на вышке и сориентировать его в пространстве, например, используя направления: север – юг и запад – восток и использовать его. И сделать это для того, чтобы используя пеленгатор, полностью или частично, осуществить, например, активную защиту объекта от нарушителей границ охраняемого объекта, как это было предложено мной в материалах заявки [26 из ст.№5], признанной экспертизой по существу РОСПАТЕНТ патентоспособной и отказавшейся вести по ней делопроизводство из-за того, что якобы мой ответ на их зарос пришел в их адрес не вовремя, с опозданием. А вот что их запросы приходят в мой адрес с опозданием в пол года это для экспертизы в порядке вещей [моя ст.№4]
Однако гораздо интереснее, если рассмотренные мои пеленгаторы устанавливать,
например, на квадрокоптерах, с помощью которых, будучи поднятыми над Землёй и удерживаемых над тем, или иным объектом, в нужном положении, осуществлять пространственную пеленгацию целей, по крайней мере, для того, чтобы обнаруживать цели (нарушителей) пересекающие <чувственные зоны> (границы охраняемых объектов) и принимать те, или иные соответствующие решения.
А ещё интереснее, если такой квадрокоптер – пеленгатор (НЧР) использовать, например, в качестве робота – охотника за летательными аппаратами, а именно.
8.2. РОБОТ – ОХОТНИК ЗА ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ
Известен [15 из ст.№5] робот – охотник за летательными аппаратами (ЛА), разработанный в Мичиганском технологическом институте, который представляет собой квадрокоптер с установленной на нем аппаратурой обнаружения ЛА в небольшом секторе обзора перед собой и сеть. Аппарат действует по принципу соколиной охоты, когда в качестве оружия используют сеть. При обнаружении неизвестного ЛА робот с расстояния 12м выстреливает в него прочной сетью и захватывает его в неё Существенным недостатком такого робота является - невозможность им мгновенно определять местонахождение ЛА, приближающихся с разных сторон.
Очевидно, что, если на квадрокоптере устанавливать без вычислительные мини КАЗ всестороннего обзора типа, описанных в моих предыдущих статьях за №13 и №14, то отмеченная проблема будет решена.
Рассмотрим работу предлагаемого робота, при установке на квадракоптере, например, КАЗ типа, одного из без вычислительных КАЗ всестороннего обзора, описанного в моей ст.№14 и в материалах заявки [29 из ст.№29 ].
Если коротко, то, приближающийся к роботу ЛА должен будит обнаруживаться частотной РЛС КАЗ, сначала, на удалении Д1, а затем, на удалении Д2 от робота. При этом, через время tз после первого обнаружения ЛА, определяют под октанту – 1/48 часть сферы вокруг робота, в которой находится ЛА и разворачивают квадрокоптер так, чтобы устройство отстреливающее сеть было направлено в центр поверхности под октанты с ЛА.
А если более подробно, то, сформированный передатчиком (ПД) и излучённый антенной <О> НЛЧМ сигнал смешивают с отраженным от ЛА НЛЧМ сигналом и преобразуют, при расстоянии Дiмежду ЛА и приемопередающей антенной <О> Октанты, в сигналы биений c частотами Fбi=2Дig/С - (Fд=2Vif/С), при приближении ЛА к антенне <О>. После чего, из совокупности всех формируемых сигналов биений, формирователь метки времени (ФМВ) обнаруживает только два сигнала биений, один с частотой Fб1=2Д1g/С, в момент обнаружения ЛА на расстоянии Д1+tзVi от антенны <О> и другой с частотой Fб2=2Д2g/С, в момент обнаружения НБ на более близком расстоянии Д2+tзVi от антенны <О>, где Д1 и Д2 – расстояния от антенны <О> до устанавливаемых рубежей обнаружения ЛА (первой и второй <чувственными зонами>) и формирует два, разделенных по времени, коротких импульса – две метки времени. При этом, через время tрв=tз – времени выдержки реле времени ФМВ, после появления первой метки, констатируют факт того, что ЛА находится в районе центра поверхности под октанты с обнаруженным в ней ЛА, пеленг центра которой известен. И, соответственно, известны и направление, и углы разворота квадрокоптера на ЛА. А после обнаружения ЛА на более близком расстоянии Д2 от излучателя НЛЧМ сигнала, производят запуск сети в сторону ЛА, для его поимки и доставки в место назначения.
Но целесообразнее, наверное, было бы, если бы робот-охотник был реализован по блок – схеме, приведенной на рис.5.6 моей ст.№17, на базе электронного цель-указателя и добавленным в схему третьим каналом, т. е. реализован по блок - схеме рис.8.1. При этом функционирование добавленного канала ничем не будет отличаться от работы двух известных каналов, но при этом появится возможность определения и контролирования местоположения квадрокоптера относительно ЛА, по крайней мере, определять где квадрокоптер, впереди или сзади ЛА.
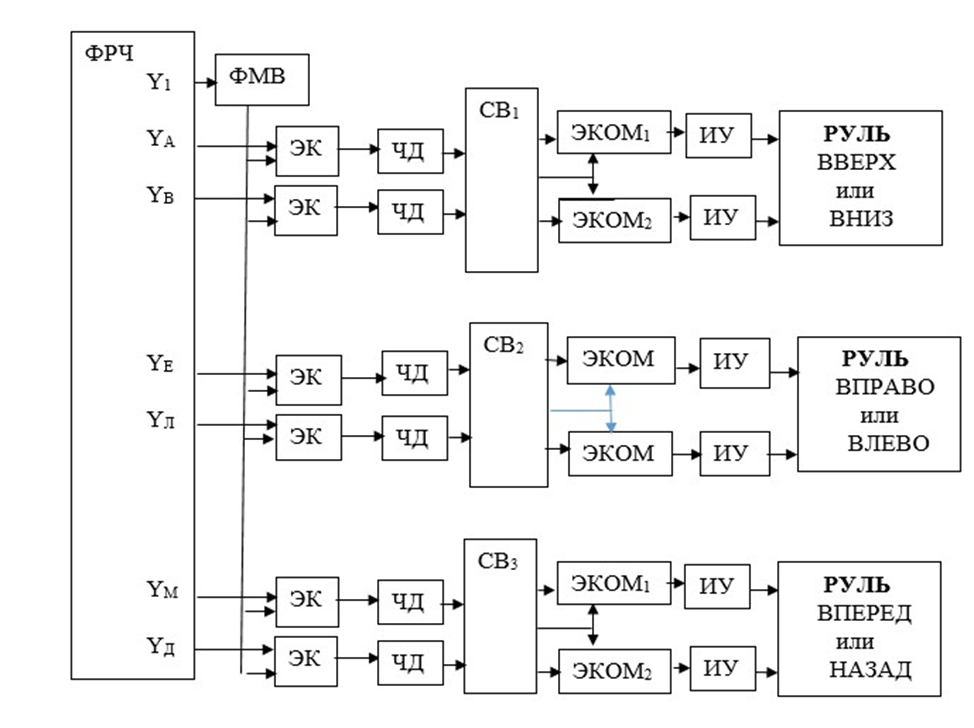
Рис.8.1
То есть, например, при выводе такого робота-охотника в район захвата ЛА он (робот), в принципе, самостоятельно сможет откорректировать своё местоположение относительно плоскости перемещения ЛА (совместит свою плоскость перемещения с плоскостью перемещения ЛА), при торможении или при дагоне ЛА (если робот окажется позади ЛА).
При этом, при выходе робота в положение, когда столкновение объектов становится неизбежным, на нём можно, в дискретно перестраиваемом передатчике (ДПД) изменить параметры НЛЧМ сигнала, одним из способов рассмотренным в моей ст.№7 (при последовательном нетрадиционном частотном методе радиолокации) и воспользоваться тем же ФМВ, что и на рис.8.1, чтобы сформированной им второй меткой времени запустить <сеть> в сторону ЛА. При параллельном же нетрадиционном частотном методе радиолокации, что предпочтительней в данном случае (при использовании небольшого количества <чувственных зон>), необходимо в схему на рис.8.1 ввести дополнительно второй ФМВ, параллельно первому, который и выполнит функцию выдачи команды на пуск захватывающей (<пленящей>) ЛА <сети>.
Следует отметить, что при пленении ЛА робот-охотник выполняет функцию наиболее эффективного радио-взрывателя типа, рассмотренного в моей ст.№15, так как при данном типе радио-взрывателей эффективная площадь, в данном случае, площадь раскрытия сети не зависит от скорости сближения объектов и всегда обеспечивается при минимальном (в заданной точке упреждения) расстоянии между сближающимися с любой скоростью объектами.
Таким образом, как следует из вышесказанного, рассмотренный робот – охотник, будучи выведенным в район захвата ЛА, может в автоматическом режиме выйти на встречу с ЛА и своей максимально раскрытой сетью в заданной точке упреждения <пленить> летательный аппарат (ЛА)
8.3. КОМПЛЕКС ДЛЯ ОБЕСПЕЧЕНИЯ ГРУППОВОГО
ПОЛЕТА ДРОНОВ
Ключевая задача любого беспилотника в промышленных работах — определять, что происходит вокруг него. Устройству для планирования своих движений каждую секунду нужно понимать, где находится земля, исследуемый объект или группа объектов, движимые они или нет, с какой скоростью они передвигаются. Все, примерно, как у машин. Собирать такие данные помогают встроенные сенсоры — обычно это камеры, радары и датчики в различных количествах и комбинациях устанавливаемые на беспилотниках.
Для формирования же фигур в окружающем пространстве с помощью большого количества квадрокоптеров (дронов) используется синхронизация по времени. Если каждый дрон точно знает, где ему нужно быть в заданное время, то можно обеспечить построение фигур из большого числа беспилотников. Для этого с помощью GNSS-системы получают общее глобальное время, которое позволяет синхронизовать всех по времени. А также дизайнеры должны создать желаемую хореографию с помощью программного обеспечения для создания 3D-анимации и далее эту хореографию преобразовать в индивидуальные траектории полёта для каждого дрона с помощью специализированного программного обеспечения.
Так к 75-летию победы в Великой Отечественной войне Санкт – Петербургскими специалистами в небо города было поднято одновременно более двух тысяч дронов, образовавших объемную фигуру летящей птицы, что было зафиксировано в книге рекордов России, как одномоментное поднятие в воздух 2198 квадракоптеров со светящимися светодиодами
Фигуры, созданные дронами, можно перемещать в пространстве одновременно. Например, в системе, разработанной инженерами из Канады и Дании, пользователь может поворачивать все дроны как единый объект или растягивать образованную ими плоскость и образовывать объёмные фигуры. Для этого у каждого дрона есть свой инерциальный блок, позволяющий ему отслеживать перемещения и стабилизировать своё положение. Управление всем роем в целом обеспечивается внешней системой захвата движений, которая состоит из высокоскоростных камер, закреплённых по периметру комнаты и отслеживающих положение светоотражающих маркеров на дронах, а также на большом и указательном пальцах пользователя. Но, к сожалению, все перемещения проводились в ограниченном небольшом объеме пространства, в данном случае, ограниченном объемом комнаты.
Обычно же один оператор управляет полетом одного объекта, например, одним квадрокоптером. Очевидно, что для того чтобы управлять полетом стаи или роем дронов, при их перемещениях на на большие расстояния, необходимо чтобы дроны, каким-то образом, были связаны друг с другом, например, <чувственной зоной> в виде поверхности сферы радиусом, примерно,
Ri=FбiC/2gi,
и толщиной (Fбмах – Fбмин)C/2gi, в центре которой должен быть расположен ведущий дрон, а вокруг поверхности сферы – ведомые дроны. При этом на ведомых дронах должны быть установлены приемопередатчики НЛЧМ сигналов с параметрами, определяемыми скоростью gi изменения частот, излучаемых ими ЛЧМ сигналов, а также по два формирователя метки времени (ФМВ1 и ФМВ2). Причем, из-за несинхронности формирования НЛЧМ сигналов на ведомых дронах и их незначительном количестве, скорости gi изменения частот могут быть одинаковыми, что с большой долей вероятности не будет влиять на формирование сигналов биений с частотами, порядка, Fбi=2Rigi/C на ведомых дронах. ФМВ1 и ФМВ2 на дронах предназначены для обнаружения на ведомых дронах, например, сигналов биений с частотами, соответственно, Fб1=2R1gi/C и Fб2=2R2gi/C, при R1>Ri>R2, что позволяет определять, находится ли дрон внутри сферы или за ее поверхностью и корректировать смещение данного дрона, в нужном направлении, в сторону поверхности сферы. А на ведущем дроне устанавливают пере-излучатель ЛЧМ сигналов ведомых дронов, представляющий из себя приемопередающую антенну нагруженную на усилитель мощности принятых НЛЧМ сигналов, что позволяет провести амплитудную селекцию переизлученных НЛЧМ сигналов, принимаемых на ведомых квадрокоптерах.
Кроме того, все квадрокоптеры подключены к беспроводной командной радиолинии управления дронами, типа рассмотренной в разделе 3.4.2, что позволяет управлять одновременно всеми дронами сразу и корректировать отклонения дронов относительно поверхности сферы. Так, например, при подаче на все дроны радиокоманды о повороте их перемещения вправо, необходимо проводить коррекцию ведомых дронов вправо и влево относительно носовой части дронов, с целью более оптимального приближения их к поверхности сферы. А при подаче радиокоманды о перемещения дронов вверх, необходимо проводить коррекцию ведомых дронов вверх и вниз относительно носовой части дронов, и т. п. Таким образом, одновременное управление всеми дронами сразу и коррекция своего местоположения в пространстве каждым ведомым дроном отдельно, позволяют управлять передвижением группы дронов в нужном направлении. Например, группой дронов, доставляющих почту (письма, посылки, грузы) на большие расстояния и в труднодоступные (горные, лесные, водные и т. п.) районы. Причем в качестве грузов могут быть использованы начинки боеприпасов с радиовзрывателями, подключенными к электродетонаторам, подрывающими начинки в нужный момент времени и на необходимом удалении от объекта подлежащего ликвидации. Таким образом, очевидно, можно доставлять начинки боеприпасов на расстояния значительно большие чем это может осуществить ствольная и реактивная артиллерия и наносить удары по площадям с большей равномерностью. При этом, при значительном удалении стаи (роя) дронов от объекта подлежащего ликвидации, ведомые дроны могут находиться у <чувствительных зон> наиболее удаленных от ведущего квадракоптера, например, на удалении Ri=300м от него, что позволяет значительно обезопасить систему дронов от ликвидации, например, ракетами противовоздушной обороны (ПВО), так как из-за малости дронов и их рас сосредоточенности в пространстве системе ПВО трудно определить ведущий квадракоптер. А поражение одного или нескольких ведомых дронов, несущих начинки боеприпасов, мало скажется на эффективности данного оружия поражения. При приближении же системы дронов непосредственно к объекту ликвидации, ведомые дроны перемещают, радиально, с удаленных <чувствительных зон> на наиболее близкие к ведущему квадракоптеру, например, находящиеся на удалениях до Ri=50м от него, что позволяет значительно сузить площадь поражения предметов на земной поверхности, в данном случае, до площади футбольного поля и повысить эффективность данного оружия поражения объектов, за счет более равномерного распределения падающих начинок боеприпасов на поверхность земли с расположенным на ней объектом. подлежащим ликвидации.
8.4. БЕСПРОВОДНАЯ КОМАНДНАЯ РАДИОЛИНИЯ
Для управления объектами на расстоянии используют воздушные и проводные линии связи, первые из которых наиболее перспективны при эксплуатации, из-за передачи командной информации по воздуху, а вторые, наиболее защищены проводом от радиопомех, так как вся информация передается в объеме пространства ограниченным размерами провода командной радиолинии.
Ниже, на рис. 3.27, приведена блок – схема эффективно помехозащищённой беспроводной командной радиолинии, которая позволяет осуществить передачу командных данных по воздуху на расстояния не ограниченные, по крайней мере, длиной провода. В состав радиолинии входят:
Рис.8.2.
- передатчик ЛЧМ сигнала, формирующий сигнал с конкретной несущей частотой f и дискретно изменяемой её скоростью g=fдFм изменения, за счет изменения, либо девиации fд частоты, либо частоты Fм модуляции, либо обоих последних параметров одновременно;
- подключенная к выходу передатчика узконаправленная антенна все время направляемая в сторону объекта, для ограничения доступа к передаваемой информации иных, кроме своего, её потребителей;
- приемная антенна ЛЧМ сигнала установленная на объекте;
- гетеродин приемной аппаратуры, установленной на объекте, формирующий высокостабильный сигнал высокой частоты fгет=fмах-fд, где fмах – максимально возможная величина частоты зондируемого ЛЧМ сигнала;
- СВЧ смеситель (ССМ) преобразующий принятый высокочастотный ЛЧМ сигнал в разностный сигнал с промежуточной частотой fпч=fмах–fгет, выделяемый фильтром и усиливаемый усилителем-ограничителем до амплитуды постоянного уровня;
- специальный сжимающий фильтр [2, стр. 14-16], степень сжатия которым входного радиоимпульса полностью определяется пределами изменения частоты в входном радиоимпульсе (девиацией частоты), т. е. фильтр, в котором высокие частоты радиоимпульса, пришедшие раньше, задерживаются больше, а низкие частоты, пришедшие позже, задерживаются меньше, что приводит к тому, что все частотные составляющие радиоимпульса смещаются во времени к концу импульса и радиоимпульс сжимается во времени;
- детектор огибающей сжатого импульса, сформированного сжимающим фильтром;
- аналоговый компаратор, формирующий видеоимпульсы при переходе огибающей сжатого импульса через уровень установленного порогового напряжения Uопор;
- секционированного селектора импульсов (СЕЛ) типа, рассмотренного в разделе 2.1.6, имеющего, по крайней мере, первую и вторую секции, информационный импульс на выходе первой из которых будет свидетельствовать о том, как будет отмечено ниже, что по линии связи передается, например, точка кода Морзе, а информационный импульс на выходе второй секции – о передачи тире кода Морзе;
- исполнительное устройство (ИУ), например, схема, позволяющая определить, по крайней мере, руль управления объектом (по высоте или по курсу).
Беспроводная командная радиолиния функционирует следующим образом.
Сформированный ЛЧМ сигнал целенаправленно передается передающей антенной в сторону приемной антенны и после его приема смешивается с высокостабильным сигналом гетеродина в СВЧ смесителе. При этом на выходе ССМ формируется, в том числе, сигнал промежуточной частоты - fпч=f–fгет, выделяемый фильтром и усиливаемый усилителем – ограничителем, выполняющим функцию нормирования сигналов, подаваемых на сжимающий фильтр по амплитуде. Выделенный фильтром сигнал промежуточной частоты представляет собой последовательность непрерывно повторяющихся ЛЧМ радиоимпульсов с заданными параметрами, на которые согласован сжимающий фильтр, что позволяет получить на его выходе, и далее на выходе детектора и аналогового компаратора, импульс по длительности равный длительности tис сжатого импульса.
Так, например, для того чтобы получить сжатый импульс длительностью tис=18нс, при радиоимпульсе на входе сжимающего фильтра длительностью, например, tи=1,8мкс, необходима девиация частоты:
fд=1/tис=1/18×10-9с=55,55555МГц,
что при коэффициенте сжатия, в данном случае:
k= tи/tис=fдtи=100
может быть осуществлено при скорости изменения частоты f зондируемого сигнала:
g=fд/tи=30×1012/Гц2
и частоте модуляции: Fм=g/fд=1,666МГц, или длительности ЛЧМ сигнала Тм=600нс.
При этом, если в качестве СЕЛ использовать селектор, реализованный на базе интегральных цифровых микросхем 133 сери, имеющих время задержки распространения сигнала по микросхеме tзр=10нс, то информационный импульс длительностью 2×10нс=20нс будет периодически возникать только на выходе первой секции секционированного селектора.
Допустим, что при рассмотренных параметрах ЛЧМ сигнала и данном сжимающем фильтре, появление информационных импульсов на выходе первой секции СЕЛ соответствует информации о том, что со стороны источника, в сторону объекта, передавалась точка кода Морзе. Тогда, очевидно, дискретное изменение девиации или частоты модуляции ЛЧМ сигнала на соответствующую величину приведет к несоответствию его параметров параметрам сжимающего фильтра и расширению сжатого импульса. Что в свою очередь приведет к появление информационных импульсов на выходе уже только второй секции СЕЛ, что будет соответствовать, например, информации о том, что со стороны источника, в сторону объекта, передавалась тире кода Морзе. Очевидно, аналогичным образом можно сформировать и передать на объект и информацию о паузе между точками и тире в коде Морзе, которая на объекте будет определяться по, например, информационному импульсу формируемому на выходе третьей секции СЕЛ. Хотя информацию о паузе между точками и тире в коде Морзе можно получить и иными способами. Т. е., как видно, дискретно манипулируя на стороне источника информации параметрами ЛЧМ сигнала можно на исполнительные устройства (ИУ) объекта управления передавать закодированную кодом Морзе информацию, например, о том, вправо или влево, вверх или вниз и т. п. далее продолжать перемещаться управляемому объекту.
Следует отметить, что для управления объектом на значительном расстоянии, помимо команд управления, необходимо видение окружающего его пространства, что легко достигается посредством установки на объекте видеокамеры и передатчика снятых ей изображений. При этом, при воздействии на канал связи устройством радиоэлектронной борьбы и вывода его из строя, объект автоматически может быть переведен в режим автопилотирования и находиться в нем до момента появления на пункте управления видеоизображений.
Очевидно, что пространственная селекция управляемого объекта с помощью узкой диаграммы направленности передающей антенны, не позволяющей обнаруживать зондируемый сигнал не желаемым потребителям, а также сложность в определении и создании копии зондируемого ЛЧМ сигнала, с целью передачи на управляемый объект ложной информации, по крайней мере, для того чтобы нарушить движение объекта в правильном направлении, позволяют говорить об эффективной защищенности рассмотренной беспроводной командной радиолинии.