
(Статья может редактироваться со временем при появлении новой информации)
ГЛАВА 11
11.1. КВАЗИДОПЛЕРОВСКИЙ РАДИОПЕЛЕНГАТОР КАК
ЭЛЕКТРОННЫЙ ЦЕЛЬ – УКАЗАТЕЛЬ
Осуществить фазовый метод радиопеленгации цели с использованием эффекта Доплера можно с помощью известного автоматического квазидоплеровского радиопеленгатора (АКР), схема которого приведена на рис.11.1 [15 из ст.№5].
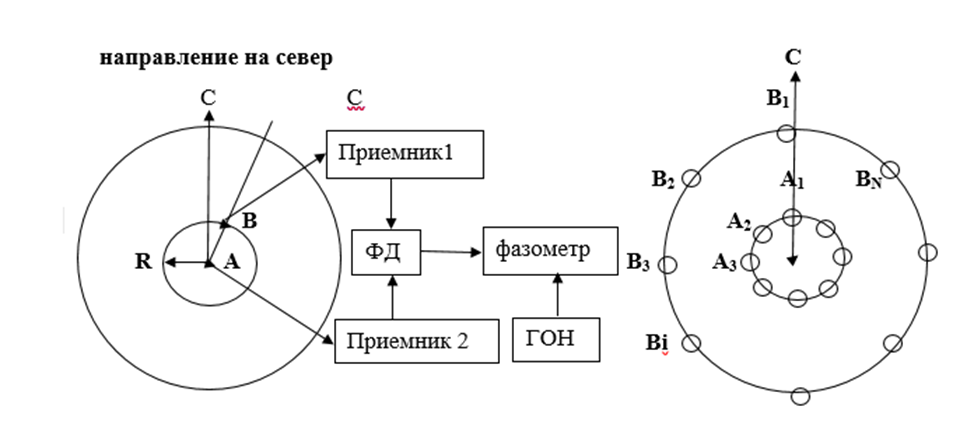
Рис.11.1. Рис.11.2.
Антенная система АКР выполнена в виде неподвижной антенны А и вращающейся вокруг нее по окружности радиуса R, антенны В. Так как антенна В при вращении циклически приближается и удаляется от источника радиоизлучения, то возникает эффект Доплера, вызывающий фазовую модуляцию принимаемого сигнала. Принятые сигналы несущей бортовой радиостанции, после усиления и преобразования на промежуточную частоту в приемниках, поступают на фазовый детектор (ФД), где выделяется низкочастотное колебание несущее в своей фазе информацию об угле пеленга цели. Для отсчета пеленга относительно северного направления меридиана в схему введен генератор опорного напряжения (ГОН). Отсчет фазометра дает непосредственно значение пеленга радиостанции относительно северного направления меридиана, проведенного через точку А.
При расположении пеленгуемого объекта точно в северном направлении от пеленгатора, фазы низкочастотных сигналов опорного и информационного каналов (на выходах ФД и ГОН) совпадают.
При больших размерах радиуса R механическое вращение антенны В с угловой скоростью Ω становится затруднительным. Поэтому вместо вращения антенны В, на практике, используется система неподвижных антенн, расположенных по окружности того же радиуса R, подключаемых поочередно к входу приемника с помощью механического или электрического коммутатора (на рис. 11.2 – антенная система, выполненная в виде кольцевой решетки
Альтернативой известного радиопеленгатора достойной быть запатентованной может быть нетрадиционный автоматический радиопеленгатор (НАП), выполненный на базе нетрадиционного частотного радиолокатора (НЧР) секторного обзора, рассмотренный в моей ст.№13 (рис.2.2), с игольчатой диаграммой направленности антенны (ДН), вкруговую вращающейся (механически или электронным способом) вокруг точки месторасположения антенны НЧР.
НЧР, которая позволяет осуществить определение момента выдачи команды на пуск ЗБ в заданную точку упреждения, а в нашем случае, момента выдачи команды на фиксацию направления ДН и, соответственно, направления на цель. А, при необходимости, выемки из ППЗУ информации о координатах (пеленгах) цели находящейся в выявленном направлении и на дальности от НЧР, определяемой месторасположением его <<чувственной зоны>> пересекаемой целью.
К достоинствам данного способа радиопеленгации цели, очевидно, можно отнести, по крайней мере, обнаружение цели только при пересечении ею узкой полоски <<чувственной зоны>> НЧР, что позволяет использовать очень узкополосный полосовой фильтр (УПФ), ширина полосы пропускания которого не зависит от скорости цели (ширины спектра частот Доплера). А это, в свою очередь, позволяет получить лучшее отношение сигнал/шум (С/Ш) и сигнал/ помеха (С/П) и, соответственно, реализовать сверхвысокочувствительный приёмник НЧР.
11.2. ЭЛЕКТРОННЫЙ ЦЕЛЬ - УКАЗАТЕЛЬ
Аналоговый электронный цель указатель, блок-схема которого приведена на рис.11.3, предназначен для выполнения функции визира, т. е. всё время должен показывать направление на цель и, будучи установленным на объекте, заставлять объект оптимально поворачиваться в сторону цели.
Цель – указатель, приведённый на рис.11.3, работает следующим образом
С помощью схемы содержащей:
- формирователь разностных сигналов (ФРЧ) типа, рассмотренного в моей ст.№10 (разделе 1.2.5.3) и с заменёнными в нём частотомерами (ЧАСТ) на полосовые фильтры: ПФА, ПФВ, ПФЕ, ПФЛ, ПФМ и ПФД;
- формирователь метки времени (ФМВ) формирующий, через время tз=f/g после обнаружения на заданном удалении ОС плюс (+) удалении tзVi приближающейся к источнику излучения НЛЧМ сигнала с радиальной скоростью Vri цели;
- электронные ключи (ЭК), открываемые в нужный момент (через время tз после обнаружения цели) времени строб-импульсом с выхода ФМВ и пропускающие на входы частотных дискриминаторов (ЧД) сигналы биений с выходов полосовых фильтров: ПФА, ПФВ, ПФЕ и ПФЛ. При этом ЧД формируют на входах первой и второй аналоговых схем вычитания (СВ): СВ1 и СВ2 напряжения постоянных уровней: UА, UВ, UЕ и UЛ с величинами, являющимися функцией расстояний от излучателя НЛЧМ сигнала до цели, плюс (+) от цели до приемных антенн < Октанты>, плюс (+) от приемных антенн до излучателя, а также являются функцией частоты FД Доплера, то есть радиальной скорости Vri цели. Так, например, согласно рис.5.5 из моей статьи №17 и при сближении объектов величины: UА, UВ, UЕ и UЛ будут равны:
UА=f[(FА=(ОС+АСi+АО)g/с)-FД]; UВ=f[(FВ=(ОС+ВСi+ВО)g/с)-FД];
UЕ=f[(FЕ=(ОС+ЕСi+ЕО)g/с)-FД]; UЛ=f[(FЛ=(ОС+ЛСi+ЛО)g/с)-FД].
После чего, и при расположении приемных антенн <А> и <В> <Октанты> в плоскости перпендикулярной плоскости горизонта, а антенн <Е> и <Л> в плоскости параллельной плоскости горизонта, на выходах СВ1 будут сформированы: на одном (среднем) постоянное напряжение с уровнем UАВ=f(UА-UВ), являющимся функцией разности двух постоянных напряжений UА и UВ и независящим от скорости цели, а на двух остальных выходах СВ1 будут сформированы знаки величины напряжения UАВ, которыми будут открывать, тот, или иной, электронные коммутаторы (ЭКОМ): ЭКОМ1 или ЭКОМ2, для пропускания через себя на входы того, или иного, исполнительного устройства (ИУ) уровня напряжения UАВ, под действием которого рули, установленные на объекте совмещенным с цель-указателем, повернут объект в нужном направлении по углу места в сторону цели.
Рис.11.3.
Аналогичным образом, автоматически, будет проведена коррекция направления объекта в сторону цели и по курсу с помощью, подобным образом выполненного, второго канала коррекции объекта, управляющего рулями, которые заставляют перемещаться объект влево или вправо по азимуту. И данный процесс коррекции направления объекта на цель будет продолжаться до тех пор, пока напряжения UАВ и UЕЛ не станут равными нулю. После чего можно считать объект находящимся в за стабилизированном состоянии, до момента возникновения рассогласований между визиром совмещенным с объектом и истинным направлением на цель.
Очевидно, что добавив в схему рис.11.3 третий канал, можно будет организовать перемещение цель-указателя вперёд или назад относительно его предыдущего месторасположения, когда принималось решение о повороте цель-указателя, например, повернуть вправо и вверх.
11.3. ПРИМЕНЕНИЕ ЭЛЕКТРОННОГО ЦЕЛЬ – УКАЗАТЕЛЯ
ИЗ РАЗДЕЛА 11.2 В КАЧЕСТВЕ УСТРОЙСТВА
ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ САМОЛЁТОВ.
Очевидно, что если установить электронный цель-указатель, рассмотренный в предыдущем разделе, на самолете, то можно определять нахождение другого самолета вблизи первого, причём ни где не будь, а в <<чувственной зоне>> НЧР – границе недопустимого его присутствия, что приведет, очевидно, к необходимости принятия на обоих самолетах решения по устранению возникшего пре цедента (например, поворота самолетов от предстоящей точки столкновения влево, или вправо, вниз или вверх, что может определить, например, искусственный интеллект)
11.4. ПРИМЕНЕНИЕ ЭЛЕКТРОННОГО ЦЕЛЬ – УКАЗАТЕЛЯ ИЗ
РАЗДЕЛА 11.2 В КАЧЕСТВЕ УСТРОЙСТВА ДЛЯ ПРЕДОТВРАЩЕНИЯ
СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И
СРАБАТЫВАНИЯ ИХ ПОДУШЕК БЕЗОПАСНОСТИ.
Очевидно, что если установить электронный цель-указатель, рассмотренный в предыдущих разделах, на автомобиле, то можно определять нахождение другого автомобиля вблизи первого, также как это было рассмотрено в предыдущем разделе в отношении самолётов. Однако это будет, наверное, нерационально. Лучше будет, наверное, если электронный цель-указатель установить стационарно (не вращающимся), например, между фар автомобиля, на равном удалении от них. А антенну применить с ДН, например, косеканскного вида, направленную над поверхностью Земли но захватывающую приближающиеся автомобили. При этом можно будет определять нахождение другого автомобиля при пересечении им, например, более дальней второй <<чувственной зоны>> НЧР первого автомобиля – границы недопустимого присутствия второго автомобиля, что приведет, очевидно, к необходимости принятия на обоих автомобилях решения по устранению возникшего пре цедента (например, поворота автомобилей от предстоящей точки столкновения влево, или вправо, что может определить искусственный интеллект). Но если принятое решение не приведёт к устранению возникшего пре цедента и автомобили всё же пересекут их первые, более ближние, <<чувственной зоны>> их НЧР, то на автомобилях сработают подушки безопасности по командам, сформированным на выходах обнаружителей цели – формирователях меток времени (ФМВ) их НЧР. Причем момент срабатывания подушек безопасности в автомобилях, что очень важно, не будет зависеть от скорости их сближения, что приведёт к повышению эффективности обеспечения безопасности пассажиров.
11.5. УСТРОЙСТВО САМОНАВЕДЕНИЯ РАКЕТЫ НА ЦЕЛЬ
Известен способ самонаведения ракеты с оружием на цель [12 из ст.№5], при котором, при близком расстоянии между объектами и медленном их перемещении относительно друг друга (при стрельбе вдагон) облучают НЛЧМ сигналом цель с одной передающей антенны, находящейся на конце продольной оси ракеты. А принимают отраженные от цели НЛЧМ сигналы установленными на ракете двумя разнесенными в пространстве и находящимися в плоскости, перпендикулярной продольной оси ракеты, на окружности с центром, совпадающим с продольной осью ракеты, на одинаковом расстоянии друг от друга, приемными антеннами, диаграммы направленности которых образуют в пространстве равносигнальное направление приема электромагнитной энергии. Т.е. при этом, дважды, по раздельно, перемножают отраженные от цели и излученный НЛЧМ сигналы и дважды выделяют разностные сигналы конкретной частоты Fбi=g2Di/C. И, при расстоянии между объектами Di=[Fбi+Fд]С/2g, проводят процесс самонаведения, где – Fд частота Доплера, а g – скорость изменения частоты НЛЧМ сигнала. И если моменты обнаружения разностных сигналов не совпадают, то, многократно, проводят перемещение ракеты в сторону равносигнального направления приема, в направлении приемной антенны, первой начинающей принимать отраженный от цели НЛЧМ сигнал, проводя поочередно торможение и ускорение ракеты. И повторяют это до момента, когда обнаружения разностных сигналов начнут совпадать во времени, что будет соответствовать нахождению цели на равносигнальном направлении приема электромагнитной энергии и окончанию процесса самонаведения ракеты с оружием на цель, в одной плоскости, при пеленгации цели методом минимума. После чего ракету поворачивают на 900 вокруг ее продольной оси и, аналогично, повторяют процесс самонаведения ракеты на цель в другой плоскости, до момента, когда принятые обеими приемными антеннами НЛЧМ сигналы начнут обнаруживаться одновременно, что будет соответствовать нахождению цели на равносигнальном направлении приема максимума электромагнитной энергии и окончанию процесса самонаведения ракеты на цель.
Очевидно, что для того чтобы процесс самонаведения ракеты на цель проводить одновременно по двум плоскостям и без ее переориентации, посредством поворота на 900 вокруг продольной оси, а также при использовании более простых антенн с их диаграммами направленности (ДН) образованными, например, простейшими вибраторами типа линейного разрезного, можно использовать для самонаведения ракеты на цель электронный цель-указатель цели рассмотренный в моей ст.№17.
Электронный цель-указатель, формирующий постоянные напряжения, сначала:
UА=f[(FА=(ОС+АСi+АО)g/с)-FД]; UВ=f[(FВ=(ОС+ВСi+ВО)g/с)-FД];
UЕ=f[(FЕ=(ОС+ЕСi+ЕО)g/с)-FД]; UЛ=f[(FЛ=(ОС+ЛСi+ЛО)g/с)-FД],
а затем их разности UАВ=f(UА-UВ) и UЕЛ=f(UА-UЛ) величинами, являющимися функциями отклонения продольной оси ракеты от продольной оси цели по курсу и высоте (для за стабилизированной ракете в плоскости горизонта). Величинами и их знаками, позволяющими управлять рулями ракеты в двух плоскостях и в нужных направлениях. выводя её на цель.
11.6. УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПЕРЕМЕЩЕНИЯ САМОЛЕТА
– ЗАПРАВЩИКА И ДОЗАПРАВЛЯЕМОГО САМОЛЕТА
ОТНОСИТЕЛЬНО ДРУГ ДРУГА
Пусть, при дозаправке до заправляемого самолёта он перемещается с самолётом заправщиком с одинаковыми скоростями и параллельно друг другу. Тогда
Известен способ перемещения самолета заправщика параллельно курсу до заправляемого самолета [13 из ст.№5], при котором, формируют короткие импульсы на РЛС определения момента выдачи команды на пуск защитного боеприпаса, типа рассмотренной в [6 из ст.№5], установленной на борту самолета-заправщика с антенной РЛС, максимум узконаправленной диаграммы направленности которой направлен перпендикулярно продольной оси самолета-заправщика, в сторону до заправляемого самолета. При этом формируют короткие импульсы в моменты возникновения и обнаружения на РЛС сигналов разностных частот Fб=g2Д/С и 3Fб=g6Д/С. Причем, когда между самолетами будет заданное расстояние Д, самолет-заправщик доварачивают в сторону от до заправляемого самолета, а когда между самолетами возникнет расстояние 3Д, самолет-заправщик доварачивают в сторону до заправляемого самолета. Т. е. конкретные величины частот. обнаруживаемых на РЛС разностных сигналов используют для многократного доварачивания самолета-заправщика относительно дозаправляемого самолета в ту или иную сторону и тем самым поддерживают перемещение самолетов параллельными курсами, в ограниченном расстоянием в 2Д коридоре.
Из сказанного и из [13 из ст.№5] можно заключить, что известным устройством не осуществляется: поддерживание перемещения самолетов по высоте; стабилизация изменения крена самолета-заправщика относительно своей продольной оси; поддерживание перемещения самолетов с одинаковыми скоростями; осуществления дагона самолетом-заправщиком до заправляемого самолета; стабилизация курса движения самолета-заправщика параллельно курсу движения до заправляемого самолета; стабилизация отклонений самолета-заправщика относительно направления движения до заправляемого самолета.
Устранить отмеченные недостатки, очевидно, можно, если на борту самолета-заправщика установить электронный цель-указатель цели типа, рассмотренного в моей ст.№ 17, используя который можно будет за стабилизировать полёт самолета заправщика относительно до заправляемого самолёта сразу в трёх плоскостях. При этом на борту до заправляемого самолета (в определённой его точке) необходимо будет установить антенну пере излучателя НЛЧМ сигнала (точечно переизлучающий усиленный по мощности НЛЧМ сигнал). То есть. антенне пере излучателя отвести роль точечной цели, попадающей в <<чувственную зону>> цель- указателя (поверхность сферы вокруг излучателя НЛЧМ сигнала). И кроме того, поверхность на борту самолета, образуемую соприкосновением так называемой <<чувственной зоны>> полусферы, сформированной вокруг излучателя НЛЧМ сигнала, установленного на самолете–заправщике, желательно, либо покрыть поглощающим электромагнитную энергию материалом, либо сделать такой, чтобы она рассеивала электромагнитную энергию, с целью повышения чувствительности приемника цель-указателя самолета-заправщика, посредством уменьшения мощности пассивной помехи на его входе. Тоже самое можно, и желательно, сделать вокруг пере излучателя радиосигнала на борту до заправляемого самолета.
Таким образом, используя такую сформированную конструкцию из устройств и их месторасположений, можно будет, используя полученные величины разностей величин типа: UАВ=f(UА-UВ); UЕЛ=f(UА-UЛ) и UМД=f(UМ-UД) и UЕЛ=f(UА-UЛ) и их знаки, отмеченные в предыдущем разделе, стабилизировать перемещение самолётов относительно друг друга в трёх плоскостях, посредством корректировки их смещений относительно равносигнального направления, определяемого цель-указателем (при: UА=UВ; UЕ=UЛ и UМ=UД).
То есть, очевидно, что если оба самолета, перемещающиеся одним курсом и с одинаковой скоростью, окажутся в положении, когда с помощью цель-указателя самолёта –заправщика будет определена одна и единственная точка полусферы – пере излучатель на до заправляемом самолете [25 из ст№5], то данный момент можно будет считать соответствующим перемещению самолетов параллельными курсами, на одной высоте и с одинаковой скоростью, а созданную ситуацию пригодной для проведения процесса дозаправки до заправляемого самолета.