Представьте, что вы дотрагиваетесь до раскаленной сковороды. Ваша рука отдергивается мгновенно, еще до того, как мозг успевает осознать боль. Это древний защитный рефлекс, спасающий нас от серьезных повреждений. А теперь представьте робота на заводе, который молча и покорно продолжает движение, даже когда его механическая рука застревает или получает удар, рискуя сломаться или навредить кому-то рядом. Долгое время эта принципиальная разница — отсутствие у машин базовой физической чувствительности — была серьезным барьером. Китайские ученые, кажется, нашли ключ к его преодолению, создав нейроморфную кожу, которая позволяет роботам «ощущать» боль и реагировать на опасность с почти человеческой скоростью. Это не просто новый датчик, а шаг к принципиально иному, более безопасному и интуитивному взаимодействию между машиной и миром.
Принцип, украденный у природы: рефлекс вместо раздумий
Главная инновация кроется не в самом факте создания чувствительной кожи, а в том, как обрабатывается сигнал от нее. Традиционный робот действует по линейной схеме: датчик зафиксировал давление -> сигнал отправился в центральный процессор -> процессор его обработал, свел с другими данными и принял решение -> команда ушла на двигатели. На это уходят драгоценные миллисекунды, а в критической ситуации порой достаточно и одной. Китайские инженеры из Университета Цинхуа пошли другим путем, вдохновляясь нашей биологией. Они разработали систему, где связь между сенсором и исполнительным механизмом прямая, почти как у спинномозгового рефлекса.
Их разработка, названная NRE-skin (нейроморфная рефлекторная электронная кожа), построена на основе нейроморфных процессоров. Эти чипы не просто вычисляют, они имитируют работу нейронов, передающих сигналы друг другу. В результате, когда давление на искусственную кожу достигает запрограммированного опасного порога, возникает электрический импульс, который идет по кратчайшему пути прямо к моторам, заставляя манипулятор отпрянуть. Как отмечают исследователи в Science Robotics, такая архитектура позволяет сократить задержку реакции до невероятных значений — менее одной миллисекунды. На практике это выглядит так: робот, сталкиваясь с внезапным препятствием или касаясь условно «горячего» объекта, отдергивает конечность резко и сразу, не продолжая движение. Это меняет правила игры в коллаборативной робототехнике, где машины трудятся бок о бок с людьми, ведь теперь у них есть встроенный инстинкт самосохранения и защиты окружающих.
Из чего сделано это «шестое чувство»: анатомия искусственной кожи
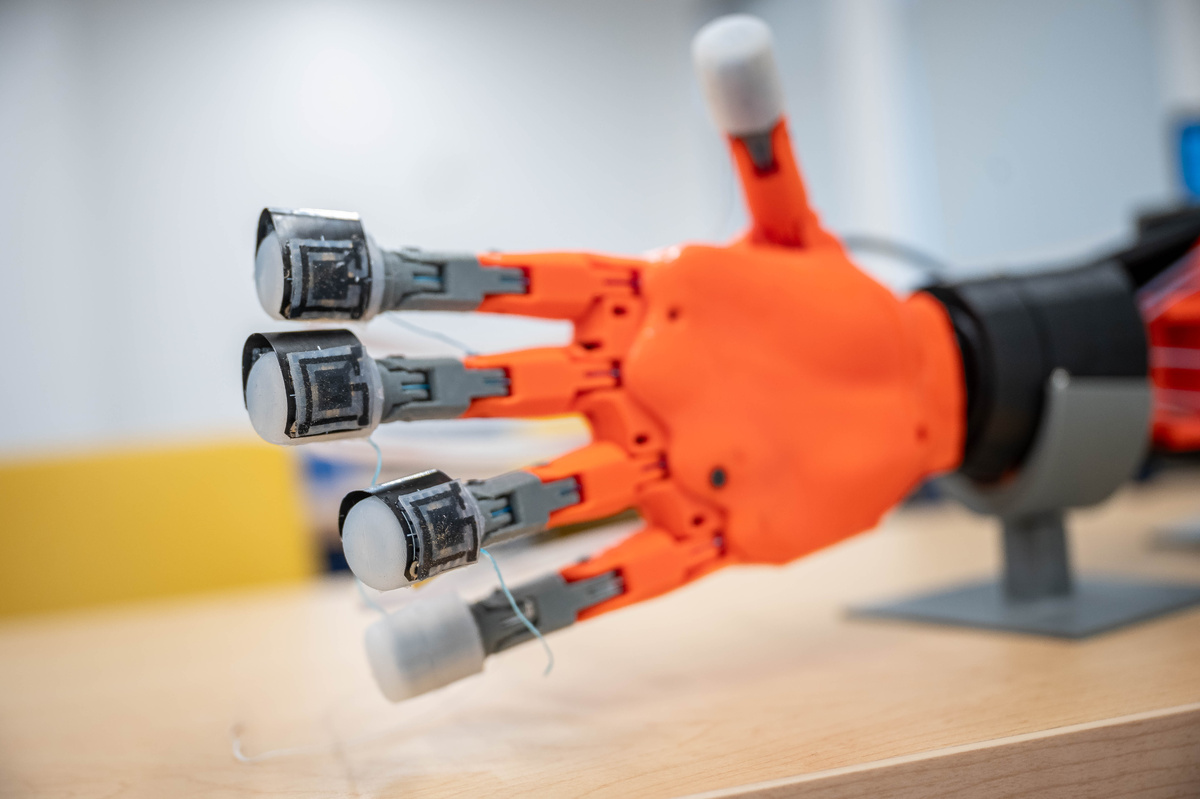
На ощупь эта кожа напоминает плотный, но гибкий полимер. Ее внешний слой действительно защитный, он оберегает внутреннюю начинку от царапин, влаги и пыли. Но вся магия скрыта глубже. Под ним лежит целая сеть микроскопических сенсоров. Это не однородное покрытие, а умная система, способная оценить не просто «коснулся/не коснулся». Она различает, как именно это произошло: легкое поглаживание, сильный удар, скользящее движение или сдавливание. Для этого инженеры объединили несколько типов чувствительных элементов, реагирующих на деформацию, вибрацию и изменение емкости.
Каждый такой сенсорный «островок» связан с нейроморфной микросхемой, которая и превращает механическое воздействие в понятный машине язык электрических импульсов. Важная деталь: даже когда с кожей ничего не происходит, она ведет тихий «разговор» с контроллером робота, посылая фоновые сигналы. Это позволяет системе моментально выявлять повреждения: если на каком-то участке этот тихий диалог прервался, робот «понимает», что его оболочка нарушена, и может, например, прекратить работу и запросить проверку. Кроме того, как пишут разработчики в Nature Communications, модульная конструкция на магнитном креплении позволяет легко менять поврежденные участки или адаптировать покрытие под разные задачи — обтянуть им захват, предплечье или корпус, как конструктор.
Не только отдернуться: как это изменит наше будущее с роботами
Самый очевидный сценарий применения — это, конечно, безопасность. Роботы с такой кожей смогут работать в людных пространствах, не требуя защитных клеток. Если человек нечаянно окажется на пути манипулятора, тот почувствует касание и остановится или мягко отодвинется, не успев причинить вред. Но потенциал технологии гораздо шире. Точное измерение силы давления — это мечта для автоматизации деликатных процессов. Представьте робота-сборщика, который может брать микроскопическую деталь или хрупкий кристалл, чувствуя, какое усилие допустимо. Или сельскохозяйственного робота, аккуратно срывающего спелые ягоды, не раздавив их.
Ученые уже смотрят в будущее, планируя научить кожу чувствовать температуру и текстуру. Это откроет двери в сервисную робототехнику и уход. Робот-помощник сможет подать человеку чашку, ощущая ее нагрев, чтобы не обжечься самому и не передать слишком горячее. Он сможет различать материалы на ощупь — скажем, понять, что держит в манипуляторе скользкое стекло, и усилить хват. Интересно, что подобные исследования ведутся и в других странах, включая Россию. Специалисты из Санкт-Петербургского политехнического университета, как сообщало РИА «Новости», разрабатывают свои тактильные сенсоры для промышленных роботов, чтобы те лучше ощущали форму и плотность объектов. Это доказывает, что направление «осязающих» машин считается одним из самых перспективных в мировой робототехнике.
Таким образом, речь идет не просто об апгрейде. Это фундаментальное изменение в философии взаимодействия робота с физическим миром. Из бездушного исполнителя, слепо следующего программе, машина превращается в более автономного и безопасного партнера, обладающего аналогом базовых инстинктов. Пока это лишь начало пути, но именно такие разработки постепенно стирают грань между механическим действием и чем-то, что мы можем с натяжкой назвать «ощущением».
Подписывайтесь на канал, чтобы не пропустить новые статьи и ставьте нравится.
Инвестируйте в российские Дирижабли нового поколения: https://reg.solargroup.pro/ecd608/airships/?erid=2VtzqwwxGTG