
ВНИМАНИЕ!!! НИЖЕ НАХОДИТСЯ КРАТКАЯ ИНСТРУКЦИЯ ПО БЫСТРОЙ НАСТРОЙКЕ АВТОПИЛОТА ДЛЯ ПРИКОРМАЧНЫХ КОРАБЛИКОВ (ДЛЯ ВОДНОЙ ТЕХНИКИ ПРИНЦИП ПОЧТИ ТОТ ЖЕ) но лучше идите на сайт AQUADROID.RU UNIBOAT MAX-I и MAX-II
ПОЛНАЯ И АКТУАЛЬНАЯ ИНСТРУКЦИЯ ПО ВСЕМ ВОЗМОЖНОСТЯМ НАХОДИТСЯ НА САЙТЕ
UNIBOAT.RU ИЛИ GPSPILOT.RU
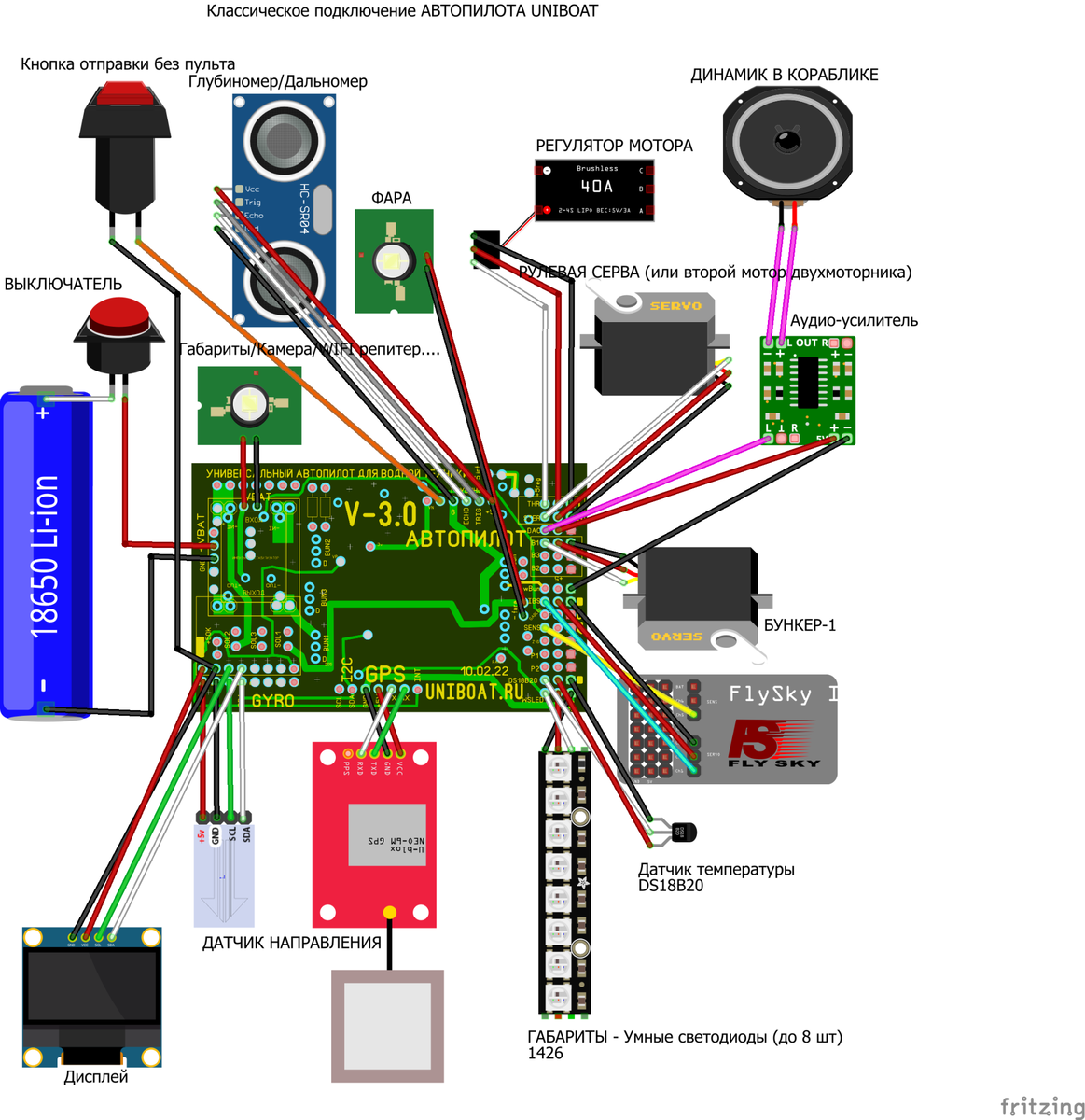
Во первых, полное руководство находится тут, на сайте производителя. Это самая актуальная информация и очень желательно ознакомится со всеми разделами, чтобы понимать все возможности автопилота. Итак вы подключили по схеме, хотя бы регулятор, серву руля и серву бункера, может фару с габаритами , что же делать дальше.
Подаем питание на автопилот и регулятор, они уже должны у вас включаться одновременно. Если не так и вы не пока не сделали одновременное включение (но обязательно сделаете потом) , то сначала включите регулятор, а потом автопилот.
Скорее всего вы услышите инициализацию регулятора, но есть вероятность, что регулятор будет пикать. Мы к этому вернемся чуть позднее. Важно в этот момент убедиться, что ваши сервы бункеров не уперлись в крайние положения, так как вы еще не настроили углы, и бункера повернутся в какие-то, почти крайние положения. Если вы увидели, что бункер уперся и серва гудит, просто отключите провод сервы временно.
Теперь пора зайти в админку и немного рассказать автопилоту UNIBOAT о вашем кораблике. Включите смартфон, зайдите в Wi-Fi сети. Там вы увидите сеть «UNIBOAT-<ИД_АВТОПИЛОТА>». Подключаетесь к ней с паролем 12345678. Если вы сеть не увидели, значит, прошло более двух минут с момента включения, и автопилот выключил сеть за ненадобностью. Просто выключите питание и включите еще раз.
После того, как сеть подключилась, надо зайти в веб-админку для настройки. Запускаем браузер (любой), к примеру, Google Chrome. В поле адреса вводим 192.168.4.1 и подтверждаем ввод.
Внимание! Примерно в это время, может чуть ранее, у вас может появиться окно, в котором смартфон уведомит вас, что кораблик, к которому вы подключились, не раздает интернет (так оно и есть, на кораблике инета нету). Вам надо поставить галочку «Все равно использовать эту точку доступа» и подтвердить. Если этого не сделать, то вы не сможете войти в веб-админку, пока не отключите «передачу данных» в смартфоне. Так что лучше не пропустите этот момент и зажгите галочку.
Нажали 192.168.4.1 и попадаем в админку. На главной странице вы должны увидеть, что датчик направления работает (не будет надписи NON ACTIVE). Также будет надпись «GPS модуль в рабочем состоянии». Если что-то не так, то смотрим на правильность подключения этих датчиков.
Заходим в меню «Настройки». Ставим в типе кораблика ваш, к примеру, «Двухмоторник» (Одномоторник стоит по умолчанию). Заходим в «Бункеры» и настраиваем. Если у вас, к примеру, двухбункерный кораблик на сервах, то внизу ставим «более одного бункера» (и обязательно жмем «Сохранить»). Заходим в «Сервы» и настраиваем углы «открыто» и «закрыто» для первого и второго бункера. Там же есть кнопка «тест открытия» и «тест закрытия». Проверяем угол и меняем, чтобы точно подстроить его для аккуратного открытия и закрытия на нужных углах.
В «Доп-1» есть настройки аудио выхода и кнопки отправки на точку без пульта. Если кнопка обычная, ставим «Кнопка на Контакте-1».
Вы можете столкнуться с тем, что ваш регулятор не инициализируется от автопилота. Это происходит потому, что регулятор ждет центрального положения для начала работы (это как логично предполагает автопилот — 1500, как раз посередине между 1000 — вращение в одну сторону, и 2000 — в другую сторону). Но некоторые регуляторы имеют смещенное значение, к примеру, 1560 или 1450 или какое-то еще. Чтобы исправить это, надо либо поставить 1500 центр в самом регуляторе (если он программируемый), либо сообщить автопилоту центральное положение вашего регулятора. Тут только подбирать. Заходим в закладку «СЕРВО» → «Мотор-ЦЕНТР», ставим значение 15хх (например, 1500, потом 1490, 1510), перезапускаем питание и слушаем регулятор (это он обмотками пикает). Как настроите — услышите разницу, и регулятор должен замолчать, ожидая команды к вращению. Нормальным поведением можно считать ситуацию, когда переключение на пульте в автоматический режим ОСТАНАВЛИВАЕТ вращение мотора, а в ручном можно джойстиком крутить мотор в разные стороны. В общем, на сайте все подробно написано по этой теме.
Далее настраиваем правильное вращение мотора. Чтобы, когда «газуем» вперед (от себя), мотор дул назад, а не вперед. Если все наоборот, меняем местами ЛЮБЫЕ два провода, идущие на мотор. Это реверсирует движение мотора. Если проводов к мотору всего два, то меняем местами их.
Может быть так, что задний ход у вас включается только если поставить сначала джойстик на центр (это включен так называемый Break). То есть регулятор запрограммирован для машинок, и нам это надо отключить, так как это очень неудобно. Если есть программатор для регулятора или вы в курсе, как отключить Break по пикам, то вам очень повезло. Если нет, то вам просто повезло, так как автопилот может самостоятельно делать Break, а потом задний ход за вас. Правда, ценой задержки в 0.7 секунд во время реверса. Но это не большая потеря. Заходим в «Доп-2» и устанавливаем «Эмуляция тормоза» в какое-нибудь значение (там несколько вариантов), обычно первое срабатывает. Перезапуск автопилота не нужен, опция работает сразу.
Хоть вы и не на воде, но надо настроить серву руля (мы предполагаем, что у нас одномоторник с рулевым пером). Поставьте по центру руль. Это делается либо механически, либо через панель в том же меню «СЕРВО» → «Руль-ЦЕНТР». Но если есть возможность поставить механически, то поставить сначала надо именно так, так как по умолчанию автопилот повернет серву на ее физический центр. После этого можно в небольших пределах подстраивать центр через вышеуказанное поле — изменение центрального положения вы увидите сразу. Ставим руль посередине, а более точную настройку имеет смысл делать только на воде.
Для проверки работы датчика направления включите автопилот, активируйте круиз-контроль и задайте минимальный газ.
Медленно поворачивайте датчик направления влево и вправо. Автопилот должен перемещать руль в противоположную сторону, пытаясь удержать зафиксированный курс.
Это нормальное поведение и свидетельствует о корректной работе системы стабилизации курса.
В приложении UniAdmin доступна 3D-модель кораблика, которая вращается в пространстве. В ней также анимирован руль, что позволяет визуально проверить правильность реакции автопилота ещё до выхода на воду.
Но очень важно именно сейчас обратить внимание на то, в те ли стороны поворачивается серва руля, иначе кораблик будет рулить в другие стороны, и автопилот не сможет работать правильно.Стоим сзади лодки. В ручном режиме джойстик руля вправо – ближняя к нам часть пера (руля) должна повернуться тоже вправо. Влево — аналогично. Если не так, значит, надо реверсировать серву. Ни в коем случае не делаем это в пульте! Реверс надо ставить в автопилоте. А в пульте, наоборот, его надо убрать, если он там стоит. Идем в закладку админки «СЕРВО» → «Руль» и ставим «Реверс» на противоположное значение.
Если у вас GPS модуль M10 или M8N, M9N, можно попробовать поставить протокол UBX вместо NMEA в главных настройках. Внимание! Если после изменения с NMEA на UBX нажать «Сохранить», автопилот перезапустится. Если на пульте (в телеметрии) увидели 0 спутников или сколько их наловилось, значит, ваш модуль работает с этим протоколом. Если увидели 88 (ошибка или отсутствие GPS модуля), то модуль не поддерживает UBX — возвращаемся обратно к NMEA. С UBX вы будете видеть на экране реальное число спутников, NMEA покажет только 12, но это никак не влияет на поведение кораблика.
У вас будет работать фара сразу (регулируется крутилками на FlySKY и триммерами на EdgeTX пультах). Габариты будут менять яркость другой крутилкой или другой парой триммеров. Настройка типов габаритов (режимы мигания) также находится в главных Настройках админки.
Внимание! При изменении конфигурации выводов и настроек «железа» — Типы габаритов, бункеров, Кнопки отправки, Активация/деактивация звука, подключение новых датчиков и т.п. — необходим перезапуск автопилота (выключение/включение питания).
Обычно это делают на воде, но если позволяет место, можно сделать и дома. Можно откалибровать датчик направления (компас/гироскоп). Для этого потребуется после запуска калибровки 100 секунд вертеть кораблик во всех направлениях (верх и низ также являются направлениями, так что вертим по сфере). Представляем, что мы находимся в шаре и хотим носом кораблика, как предполагаемой кистью, закрасить сферу изнутри. Калибровка включается либо с пульта, либо из веб-админки в меню «Инструменты».
На пульте надо: опустить тумблер режима (SWС) вниз. Поднять левый джойстик (стик) вверх (и держать!) и вправо, и переключить тумблер SWD в сторону этого джойстика (вниз). Если кораблик оснащен динамиком, то он будет считать от 1 до 9 в течение 100 секунд. На 90 секунде самое время положить кораблик в горизонтальное положение и дождаться его перезапуска (он будет более долгим, т.к. идет калибровка гироскопа). Поэтому ждем, пока не погаснут фары и на пульте не появятся цифры (телеметрия).
Настройте свое дополнительное оборудование, если оно есть. А все остальное надо делать на воде.
FAQ
Кораблик правильно плавает на автопилоте и в ручном режиме, но задний ход быстрее, чем передний. Как сделать, чтобы вперед он плыл быстрее?
Ответ: Поменяйте местами любые два провода, идущие от регулятора к мотору. Затем зайдите в веб-панель управления на вкладку «СЕРВО» и измените значение в поле «Реверс» на противоположное (для мотора).
Кораблик плывет задним ходом на автопилоте, а в ручном режиме плавает нормально.
Ответ: В пульте установлен реверс для третьего канала. Установка реверсов в пульте не допускается — отключите ВСЕ реверсы в пульте (в пультах FlySKY: долгое нажатие ОК -> Гаечный ключ -> Reverse).
В ручном режиме кораблик плавает нормально и поворачивает в соответствии с джойстиком, но на автопилоте виляет, поворачивает в разные стороны и ведет себя неадекватно. На круиз-контроле не держит курс и сразу поворачивает в сторону. Я уже проверил, в пульте реверсы не установлены.
Ответ: Компас установлен неправильно. Скорее всего, он перевернут. Если компас установлен точно правильно, возможно, он работает некорректно и требует замены.
Автопилот не запускается. Заметил, что при выключении регулятора автопилот запускается нормально.
Ответ: Более подробная информация здесь. Сервопривод, подключенный к порту ОДИН, не позволяет автопилоту запуститься, как только на него подается напряжение с регулятора. Запуск проходит нормально, потому что при подключении регулятора он запитывает серву, которая подтягивает контакт данных порта 1 к плюсу. Переключите серву в другой порт или используйте сервопривод, который не подтягивает контакт данных к плюсу. Это особенность только первого порта.
Как включить реверс бункера? При команде «закрыть» он открывается, а при команде «открыть» — закрывается.
Ответ: Понятия «реверс» для бункеров не существует. Есть только положение «открыто» и «закрыто». Это значения от 0 до 180. Просто поменяйте эти значения местами в админке для нужного бункера. Хотя в автопилоте реализовано отключение питания сервоприводов при бездействии, рекомендуется точно настроить эти углы, чтобы серва не упиралась при закрытии и открытии.
На круиз-контроле кораблик не держит курс. На автопилоте тоже не поворачивает и плывет прямо.
Ответ: Загляните в веб-админку. Параметры ПИД для круиз-контроля и автопилота равны НУЛЮ или очень малы. Внесите ненулевые значения как минимум в поле «П» (пропорциональная составляющая).
Не могу обновить прошивку. В телефоне вижу, что подключено одно устройство, но когда захожу в админку с того же телефона по Wi-Fi и нажимаю «ОБНОВИТЬ», ничего не происходит.
Ответ: Когда вы с телефона, который раздает интернет для обновления (LAN2), одновременно подключаетесь по Wi-Fi к веб-админке автопилота, телефон теряет связь с интернетом. Он пытается получить интернет из Wi-Fi сети кораблика, где его нет. Поэтому, если хотите нажать кнопку «ОБНОВИТЬ» из админки, заходите в нее с другого устройства. Телефон, раздающий интернет, оставьте в покое. Кнопку нажимать необязательно. Того же результата можно достичь, удерживая оба джойстика пульта влево при старте автопилота, пока не начнется загрузка новой прошивки. Если доступна новая прошивка, автопилот обновит ее и без ваших действий. Главное — не мешайте ему.
Кораблик плывет не прямо на точку, а по дуге или плывет прямо, а затем, по мере приближения, сворачивает. На большой скорости плавает нормально.
Ответ: Когда кораблик плывет таким образом, он ориентируется по компасу, точнее — по плохо откалиброванному компасу. Когда он плывет быстро и ровно — он использует курс от GPS. Работает гибридный режим, который переключается между компасом и GPS (описано в инструкции). Условия переключения находятся во вкладке «Сенсоры». Ваш компас плохо откалиброван, и его показания неточны, отсюда и дуга. По мере приближения к точке угол отклонения становится более заметным, и автопилот корректирует курс. Чем дальше от точки, тем точнее должен быть компас. Вы можете настроить условия переключения, например, установить переход на GPS при скорости выше 2 км/ч. Тогда компас будет использоваться только при старте и торможении. Такие настройки стоят по умолчанию. Хорошо откалиброванный компас обеспечивает качественное удержание курса, плохой — приводит к ошибкам. Рекомендуется гибридный режим по умолчанию, но убедитесь, что кораблик чаще движется со скоростью выше порога переключения на GPS.