Системы лазерного сканирования (LiDAR) уже довольно давно применяются для составления карт рельефа дна (батиметрическая съёмка), а также при обследовании различных подводных объектов. Они помогают получать достаточно точные трёхмерные изображения в условиях плохой видимости в толще воды.
Чаще всего в таких системах применяется зелёный лазер с длиной волны 532 нм, поскольку именно эта длина волны обеспечивает наилучшую пропускаемость светового потока в водной среде, однако в зависимости от оптических свойств воды в разных случаях требуются разные длины волн, так например в глубоководных слоях океана синие лазеры обычно работают лучше, чем их зелёные аналоги, которые больше подходят для лазерного сканирования в прибрежных водах с большим количеством фитопланктона.
Но в любом случае, основной проблемой при использовании подводной сканирующей системы, помимо эффекта обратного рассеяния, является слабость отражённого излучения, иными словами далеко не все отражённые от объекта фотоны попадают в фотоприёмное устройство особенно на больших дистанциях сканирования. Для решения этой проблемы с недавнего времени начали применяться так называемые квантовые системы подводного сканирования (Q-LiDAR) на основе технологии обнаружения одиночных фотонов.
Схема таких устройств может выглядеть следующим образом:
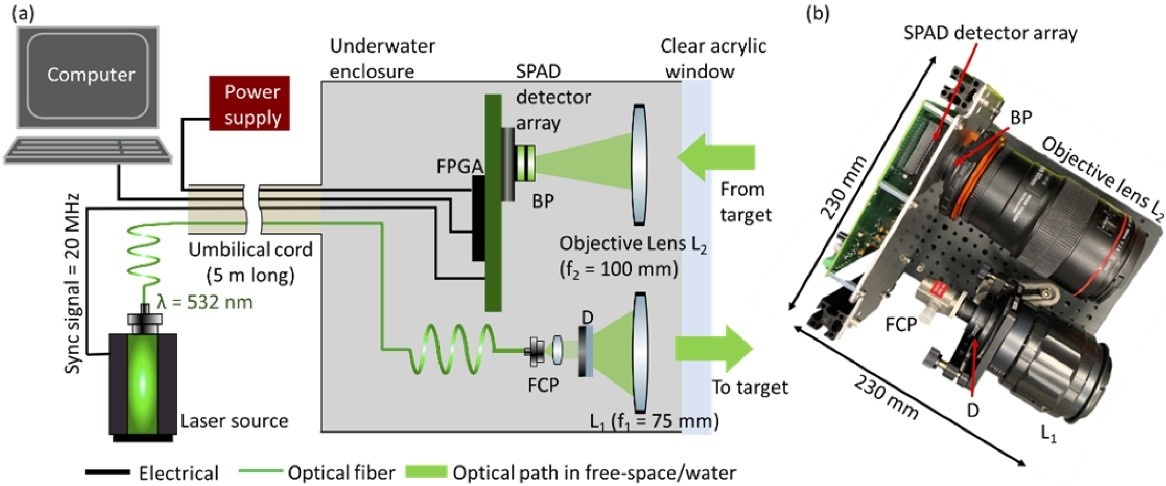
На данной схеме, помимо импульсного пикосекундного лазера (532 нм, 20 МГц), представлен волоконный коллиматор (FCP), оптический диффузор (D), линзы (L1 и L2), полосовые фильтры (BP) и сверхчувствительный массив однофотонных лавинных диодов (SPAD). Такой однофотонный подход напрямую влияет на увеличение глубины обнаружения, поскольку позволяет квантовому фотоприёмнику регистрировать слабые сигналы всего от нескольких фотонов, отразившихся от подводного объекта.
Помимо этого, Q-LiDAR точно фиксирует время прибытия отдельных фотонов, что обеспечивает более точные измерения расстояния до объекта. Он также позволяет получать более качественные трёхмерные изображения, а однофотонная механика создаёт фильтрацию фонового шума.
В результате можно более чётко различать истинный сигнал и нежелательные помехи. Дальнейшая эволюция подобных квантовых систем лазерного сканирования может быть связана с использованием сверхпроводящих однофотонных детекторов на нанопроволоке (SNSPD или SSPD).