
(Статья может редактироваться со временем)
Ниже рассмотрен возможный вариант принципа предупреждения о ракетном нападении противника, посредством массового им запуска межконтинентальных баллистических ракет (МБР) [24 из ст.№5], который в РОСПАТЕНТ отказались, как и идею, рассмотренную в предыдущей моей ст.№17, рассматривать по существу, в частности, из-за того, что в материалах моей заявки на выдачу патента на изобретение я где-то свою фамилию написал как Семёнов, а где-то как Семенов.
ГЛАВА 7
7.1. СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О РАКЕТНОМ НАПАДЕНИИ
В соответствии с проектом системы предупреждения о ракетном нападении, помимо надгоризонтных и загоризонтных РЛС в систему должен входить и космический эшелон, который позволяет значительно расширить возможности системы за счёт способности обнаруживать межконтинентальные баллистические ракеты (МБР) практически сразу после старта.
Следует отметить, что высота, на которой отделяются ступени МБР, зависит от модели. Например, у МБР Minuteman-III первая ступень за минуту работы поднимает ракету на высоту 30 километров, двигаясь не вертикально, а под углом к земле. Вторая ступень за минуту работы выводит ракету уже на 70–90 километров — высота зависит от расстояния до цели. Третью ступень при запуске на минимальную дистанцию можно не применять, сразу приступив к разбрасыванию боевых блоков. Боеголовки МБР перемещаются на высоте, когда полезная нагрузка ракеты уходит на сотни километров в космос — обычно это высота 1000–1200 км над Землёй. После этого ракета начинает по спирали спускаться вниз [15 из ст.№5].
В СССР космическая система раннего обнаружения стартов МБР из четырёх искусственных спутников Земли (ИСЗ) (система «Око») на высокоэллиптических орбитах была развёрнута к 1979 году и принята на вооружение в 1982 году. Для приёма, обработки информации и управления ИСЗ системы, под Москвой, был построен командный пункт. Система предназначалась для наблюдения за континентальными ракетоопасными районами США. Для уменьшения засветки фоновым излучением Земли и отражениями солнечного света от облаков спутники вели наблюдение не вертикально вниз, а под углом. Для этого апогеи высокоэллиптической орбиты были расположены над Атлантическим и Тихим океанами. Дополнительным преимуществом такой конфигурации была возможность наблюдать за районами базирования американских МБР на обоих суточных витках, поддерживая при этом прямую радиосвязь с командным пунктом под Москвой, либо с Дальним Востоком. Такая конфигурация обеспечивала условия для наблюдения примерно 6 часов в сутки для одного спутника. Чтобы обеспечить круглосуточное наблюдение, необходимо было иметь на орбите не менее четырёх космических аппаратов одновременно. Для обеспечения надёжности и достоверности наблюдений в состав группировки должны были входить девять спутников — это позволяло иметь резерв на случай преждевременного выхода спутников из строя, а также вести наблюдение одновременно двумя либо тремя ИСЗ, что снижало вероятность выдачи ложного сигнала от засветки регистрирующей аппаратуры прямым или отражённым от облаков солнечным светом. Такая конфигурация из 9 спутников была впервые создана в 1987 году.
В дополнение с 1984 года на геостационарной орбите (ГСО) размещался один ИСЗ (система «Око-С»). Он представлял собой тот же базовый спутник, несколько модифицированный для работы на ГСО. Эти спутники помещались в точку стояния на 24° западной долготы, обеспечивая наблюдение за центральной частью территории США на краю видимого диска Земли.
Спутники на ГСО обладают существенным преимуществом — они не изменяют свою позицию относительно Земли, как бы «висят» над одной и той же точкой земного экватора, и могут обеспечить постоянную поддержку группировке спутников на высокоэллиптических орбитах, но для этого необходимо соблюдение трех условий: спутник должен находиться на круговой орбите, плоскость которой должна совпадать с плоскостью экватора и высота орбиты должна быть таковой (≈35786 км), что угловая скорость орбитального движения спутника совпадала с угловой скоростью вращения Земли. На самом деле положение на ГСО неустойчивое. Поэтому реальному спутнику на ГСО приходится иметь запас топлива, чтобы постоянно «подруливать» к точке, в которой он должен находиться. Срок действия таких спутников ограничен несколькими годами.
Спутник, обращающийся на ГСО, находится под воздействием ряда сил (возмущений), изменяющих параметры этой орбиты. В частности, к таким возмущениям относятся гравитационные лунно-солнечные возмущения, влияние неоднородности гравитационного поля Земли, эллиптичность экватора и т. д. Деградация орбиты выражается в двух основных явлениях: в смещении спутник вдоль орбиты от своей первоначальной орбитальной позиции в сторону одной из четырёх точек стабильного равновесия, так называемых «потенциальных ям ГСО» (их долготы 75,3°E, 104,7°W, 165,3°E, и 14,7°W) над экватором Земли и в наклонение орбиты спутника к экватору, которая увеличивается (от первоначального 0) со скоростью порядка 0,850 в год и достигает максимального значения 150 за 26,5 лет.
Для компенсации этих возмущений и удержания спутника в назначенной точке стояния он оснащается двигательной установкой (химической или электроракетной). Периодическими включениями двигателей малой тяги (коррекция «север — юг» для компенсации роста наклонения орбиты и «запад — восток» для компенсации дрейфа вдоль орбиты) спутник удерживается в назначенной точке стояния. Такие включения производятся по нескольку раз в 10 — 15 суток. Существенно, что для коррекции «север — юг» требуется значительно большее приращение характеристической скорости (около 45 — 50 м/с в год), чем для долготной коррекции (около 2 м/с в год). Для обеспечения коррекции орбиты спутника на протяжении всего срока его эксплуатации (12 — 15 лет для современных телевизионных спутников) требуется значительный запас топлива на борту (сотни килограммов в случае применения химического двигателя). Химический ракетный двигатель спутника имеет вытеснительную подачу топлива (газ наддува — гелий), работает на долгохранимых высококипящих компонентах. На ряде спутников устанавливаются плазменные двигатели. Их тяга существенно меньше по отношению к химическим, однако большая эффективность позволяет (за счёт продолжительной работы, измеряемой десятками минут для единичного манёвра) радикально снизить требуемую массу топлива на борту. Выбор типа двигательной установки определяется конкретными техническими особенностями аппарата.
Эта же двигательная установка используется при необходимости для манёвра перевода спутника в другую орбитальную позицию. В некоторых случаях (как правило, в конце срока эксплуатации спутника) для сокращения расхода топлива коррекция орбиты «север — юг» прекращается, а остаток топлива используется только для коррекции «запад — восток».
Запас топлива является основным лимитирующим фактором спутника на геостационарной орбите (кроме отказов компонентов самого спутника). Однако некоторые страны проводят эксперименты с дозаправкой действующих спутников прямо на ГСО для продления его работоспособности.
К недостаткам ГСО можно отнести: задержку сигнала; невидимость ГСО с высоких широт; солнечную интерференцию.
Связь через геостационарные спутники характеризуется большими задержками в распространении сигнала. При высоте орбиты 35 786 км и скорости света около 300 000 км/с ход луча «Земля — спутник» требует около 0,12 с, ход луча «Земля (передатчик) → спутник → Земля (приемник)» ≈0,24 с (то есть полная задержка (измеряемая утилитой Ping) при использовании спутниковой связи для приема и передачи данных составит почти полсекунды). С учётом задержки сигнала в аппаратуре ИСЗ, в аппаратуре и в кабельных системах передач наземных служб общая задержка сигнала на маршруте «источник сигнала → спутник → приёмник» может достигать 2—4 секунд. Такая задержка затрудняет применение спутников на ГСО в телефонии и делает невозможной применение спутниковой связи с использованием ГСО в различных сервисах реального времени (например в онлайн-играх).
Так как геостационарная орбита не видна с высоких широт (приблизительно от 81° до полюсов), а на широтах выше 75° наблюдается очень низко над горизонтом (в реальных условиях спутники просто скрываются выступающими объектами и рельефом местности) и виден лишь небольшой участок орбиты, то в высокоширотных районах Крайнего Севера (Арктики) и Антарктиды невозможна связь и телетрансляция с использованием ГСО. К примеру, если на широте Санкт-Петербурга (~60°) видимый сектор орбиты равен 84 % от максимально возможного (на экваторе), то на широте полуострова Таймыр (~75°) видимый сектор составляет 49 %, а на широте Шпицбергена и мыса Челюскина (~78°) — лишь 16 % от наблюдаемого на экваторе.
Одним из самых неприятных недостатков ГСО является уменьшение и полное отсутствие сигнала в ситуации, когда солнце и спутник находятся на одной линии с приёмной антенной (положение «солнце за спутником»). Данное явление присуще и другим орбитам, но именно на геостационарной, когда спутник «неподвижен» на небе, проявляется особенно ярко. В средних широтах северного полушария солнечная интерференция проявляется в периоды с 22 февраля по 11 марта и с 3 по 21 октября, с максимальной длительностью до десяти минут. В такие моменты в ясную погоду солнечные лучи, сфокусированные светлым покрытием антенны могут даже повредить (перегреть) приёмо-передающую аппаратуру спутниковой антенны [15 из ст.№5].
После того как спутник выведен на орбиту, его положение должно быть определено и строго фиксировано. Для этого необходимо стабилизировать положение спутника относительно плоскости ГСО и удерживать спутник постоянно на плановой позиции в точке стояния для точной и жесткой ориентации излучения антенн в нужном направлении на земную поверхность. Без стабилизации положения спутника на ГСО и его антенн, в частности, ретрансляцию телепередач на отведенную территорию на Земле обеспечить невозможно. Стабилизация положения в сущности означает сохранение постоянного направления оси корпуса спутника относительно плоскости ГСО. Если эта проблема решена, то обеспечить постоянную направленность антенн уже проще. Существуют два основных способа стабилизации спутника на ГСО: это стабилизация вращением, когда, обычно для стационарных спутников ось вращения (стабилизации) выбирается параллельной оси Земли, и стабилизация по трем осям (непосредственная стабилизация) осуществляется при управлении угловым положением спутника относительно каждой из трех осей координат.
Стабилизация вращением является простейшим видом стабилизации (метод вращающегося "волчка" на столе). Она осуществляется за счет вращения спутника или его части с частотой 80... 100 об/мин вокруг оси, параллельной оси вращения Земли. При вращении появляется гироскопическая жесткость и создается угловой момент в фиксированном направлении. При отклонении его от заданной величины включаются собственные реактивные двигатели спутника и устраняют отклонение.
Стабилизация по трем осям координат (по оси рыскания, оси крена, оси тангажа) или непосредственная стабилизация - это другой способ стабилизации. Непосредственная стабилизация осуществляется при управлении угловым положением спутника относительно каждой из осей координат. Такое управление выполняется либо в результате непосредственного изменения угловых перемещений и приложения моментов силы относительно каждой из его трех осей, либо за счет применения устройств с инерционным моментом, например, маховика, который действует одновременно как гироскоп, стабилизатор вращения и двигатель. Такая система использована в американских спутниках "Интелсат V" и "Интелсат 5V". На них быстроходный вращающийся маховик удерживает направленные на Солнце панели солнечных батарей, обеспечивая гироскопическую жесткость спутника по одной, двум или трем осям. Для поддержания постоянной ориентации спутника эти устройства снабжаются чувствительными элементами и датчиками.
Согласно требованиям, нестабильность положения спутника на геостационарной орбите в направлении север-юг и восток-запад не должна превышать 0,10. У современных спутников-ретрансляторов максимальная ошибка системы ориентации и стабилизации положения спутника не превышает: по оси крена 0,10; по оси тангажа 0,150; по оси рыскания 0,20.
Кроме этого, для удержания спутника на заданной позиции в точке стояния применяют специальный сигнал пилот-луч.
Сформированный на земной передающей станции и направляемый постоянно под фиксированным углом в сторону спутника этот сигнал принимается и обрабатывается на его борту, в результате чего определяется величина отклонения спутника от его орбитальной позиции. Затем, в случае превышения спутником допустимого отклонения, включаются его собственные двигатели, которые устраняют отклонение, что позволяет в 2...3 раза улучшить суммарную точность наведения антенн спутника на заданную территорию Земли.
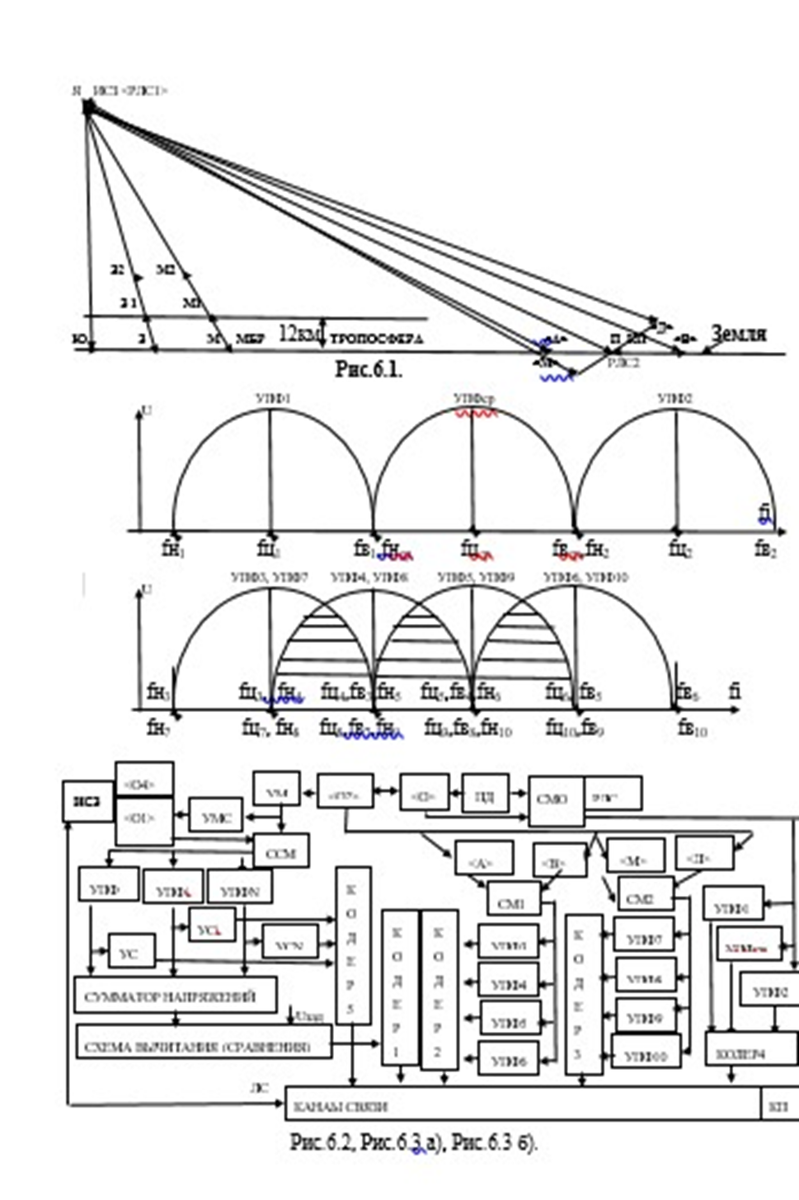
СПРН, с за стабилизированным в точке должного своего стояния на ГСО спутником, может быть отображена, например, как на рис.6.1 и выполнена по блок – схеме, приведенной на рис.6.2, то есть так:
- расположенных на ИСЗ приемной антенны <О2> НЛЧМ2 сигнала, выход которой, через последовательно соединенные умножитель частоты (УМ) и усилитель мощности (УМС), подключен к входу приемопередающей антенны <О1> НЛЧМ сигнала, работающему на передачу, выход которой, работающий на прием, подключен к входу смесителя (ССМ), второй вход которого подключен к выходу УМ, а выход, через N (УПФ, УПФi, УПФN) узкополосных полосовые фильтров (УПФ) – к входам сумматора напряжений, выход которого, через схему сравнения, с вторым входом подключенным к шине заданного напряжения, подключен к кодеру 1, выход которого, через канал связи (КС) и линию связи (ЛС) связан с командным пунктом (КП);
- расположенной на Земле частотной РЛС, содержащей передатчик (ПД) НЛЧМ2 сигнала, подключенный к приемопередающей антенне <О> и маломощным выходом к смесителю (СМ0), второй вход которого подключен к выходу антенны <О>, работающему на прием, а выход, через: УПФ1, УПФср и УПФ2, подключен к входам кодера 4, а также содержащей приемные антенны <А> и <В>, выходы которых подключены к входам СМ1 и приемные антенны <М> и <Д>>, выходы которых подключены к входам СМ2, при этом выход СМ1, через УПФ3, УПФ4, УПФ5 и УПФ6, подключен к входам кодера 2, а выход СМ2, через УПФ7, УПФ8, УПФ9 и УПФ10, к входам кодера 3, а выходы кодеров 2, 3 и 4, через КС и ЛС связаны с ИСЗ.
Решению задачи по радиолокационному обнаружению массового запуска МБР сопутствуют следующие факторы:
- нападение сопровождается множеством почти одновременно запускаемых МБР, местоположение и направление запуска которых известны;
- облучение объектов ЛЧМ сигналом миллиметрового диапазона волн, поглощаемых атмосферой Земли, позволяет принимать на ИСЗ отражения только от
больших по размерам первых ступеней МБР выведенных за атмосферу Земли и не принимать отражения от других малоразмерных объектов (спутников);
- сверхчувствительность приемной аппаратуры на Земле и ИСЗ определяется очень узкими полосами пропускания сигналов биений УПФ.
- известное местоположение ИСЗ на ГСО позволяет использовать антенны: <О> и <О2> с сверх узконаправленными диаграммами направленности (ДН);
- отсутствие мешающих объектов на удалениях, порядка 35786км, позволяет использовать НЛЧМ сигнал с частотой модуляции большей, чем частота, определяемая однозначным определением расстояний между объектами (ИСЗ, МБР, РЛС).
Рассмотрим работу СПРН используя: рис.6.1, рис.6.2, рис.6.3, а также при следующих параметрах НЛЧМ2 сигнала, излучаемого РЛС: f2=4,5ГГц; fд2=10МГц; Fм=CN/2ЯП=3,75Гц (при N=1 и ЯП=40000км); g2=Fмfд2=375х105Гц2; tз=f/Fмfд=120с. А также, при Z=4 и параметрах НЛЧМ сигнала: f=2Zf2=72ГГц; fд=2Zfд2=160МГц; Fм=3,75Гц; g=Fмfд=6х108Гц2; tз=f/Fмfд=120с, излучаемым, усиленным по мощности усилителем (УМС), через антенну <О1> и сформированным, посредством умножения умножителем частоты (УМ) в 2Z раз частоты НЛЧМ2 сигнала, принятого на ИСЗ антенной <О2>. И воспользуемся рис2.10, где, например: ЯЮ=35786км ЯЗ=√ЯЮ2+ЮЗ2=36182км, ЯМ=√ЯЮ2+ЮМ2= 37540км, соответственно, расстояния от точки Я стояния ИСЗ на ГСО до точек Ю, З и М на Земле; ЮЗ=5341км и ЮМ=11341км – расстояния от точки Ю до ближней и дальней точек З и М расположения шахт МБР на территории установки МБР с самым большим её размером в ЗМ=6000км; ЗЗ1=ММ1=40км – расстояния от шахт до мест набора МБР радиальных скоростей Vр, по отношению к ИСЗ, и отсоединения от них первых ступеней разгона, на удалениях ЯЗ1=ЯЗ-ЗЗ1=36142км и ЯМ1=ЯМ-ММ1=37500км от ИСЗ; ЯЗ2=ЯЗ1-Vрtз=35920км и ЯМ2=ЯМ1-Vрtз=37278км – расстояния от ИСЗ до мест нахождения МБР, когда на выходе ССМ формируются сигналы биений с частотой не попадающей в полосы пропускания: УПФ; ...; УПФN.
Тогда, при: скорости света С=3х108м/с и сближении ИСЗ с взлетевшими МБР, имеющими, например, Vр=2км/с и находящимися, например, в точках З1 или М1, на выходе ССМ будут сформированы сигналы биений с частотами:
FЯЗ1=2gЯЗ1/C-2fVр/C=143 МГц и FЯМ1=2gЯМ1/C-2fVр/C=150 МГц,
которые могут быть выделены УПФ с центральными частотами fц от 143МГц до 150МГц и полосами пропускания 0,001fц=150КГц. УПФ типа ФП2ПГ-40 или ФП2П1-284 [15] с центральными частотами fц=10МГц и полосами пропускания fв-fн=10КГц. При этом, например, УПФ с fц=150МГц и полосой пропускания от 149,92МГц до150,08МГц будет выделять сигналы биений с частотами, которые будут формироваться при нахождении МБР на удалениях: от
ЯМ1МАХ=С150,08МГц/2g= 37520км до ЯМ1МИН=С149,92МГц/2g=37480км от ИСЗ
Т. е. на удалениях (37540-37520)км=20км и (37540-37480)км=60км от Земли (за тропосферой) и точки местоположения шахт МБР, что позволяет обнаруживать МБР и при других радиальных скоростях Vр (больших или меньших чем 2км/с).
Очевидно, что при (FЯМ1- FЯЗ1)/150КГц=47, все МБР взлетевшие одновременно из своих шахт, с территории площадью, порядка 6000км2, могут быть обнаружены с помощью, в данном случае более 47 УПФ, после обнаружения выделенных ими сигналов биений, за время 60км/Vр=30с пролета МБР интервала их обнаружения в 69км. При этом, если просуммировать все напряжения с выходов всех N УПФ, выделяющих сигналы биений, сформированные на выходе ССМ, после смешивания в нём НЛЧМ2 сигнала, сформированного на выходе УМ с отражениями от МБР, сумматором напряжений и сравнить, схемой сравнения, полученную сумму Uсум с заданным напряжением Uзад, то на выходе схемы сравнения, например, аналогового компаратора, получим, при Uсум>Uзад, высокий потенциал – 1, свидетельствующий о том, что произошло нападение и которая (1), через кодер 1, канал связи (КС) и линию связи (ЛС) передаётся с ИСЗ на Землю, на командный пункт (КП).
Следует отметить, что в пространства от ИСЗ до отделившихся ступеней МБР, массового количества объектов, соизмеримых с размерами первых ступеней МБР, в принципе, не может быть. Поэтому частоту Fм, при необходимости, можно повысить в 2 и более раза и также уменьшить девиацию fд.
Рассмотрим, как с помощью наземной частотной РЛС можно определить отклонения ИСЗ от места должного его стояния на ГСО и, при необходимости, переместить спутник в заданную точку стояния.
Пусть, при заданном удалении ЯП антенны <О> РЛС от ИСЗ, на выходе СМ0 будет сформирован сигал биений с частотой FЯП=2ЯПg2/C=10МГц и выделен УПФср с параметрами: fц=FЯП=10МГц; fв=10,005МГц; fн=9,995МГц. А при ЯП1=40040км, или ЯП2=39960км, будут сформированы сигналы биений с частотами FЯП1=2ЯП1g2/C=10,01МГц и FЯП2=2ЯП2g2/C=9,9МГц, которые будут выделены УПФ1 и УПФ2 с не пересекающимися полосами пропускания, рис.6.3. а) и, соответственно, параметрами: fц1=FЯП1=10,1МГц; fв1=10,015МГц; fн1=10,005МГц и fц2=FЯП2=9,99МГц; fв2=9,995МГц; fн2=9,985МГц. Т. е., удаление ИСЗ от точки своего стояния на ГСО и от РЛС2 на 40 км будет зафиксировано появлением сигнала биений на выходе УПФ1, а приближение ИСЗ к РЛС2 – сигналом на выходе УПФ2. При этом информация на трех выходах трех УПФ отображается в виде кодовых комбинаций вида: 001; 010; 100, соответствующих необходимости проведения коррекции местоположения ИСЗ: 001 –удалять ИСЗ от РЛС2; 100 – приближать ИСЗ к РЛС2; 010 – не проводить коррекций. Информация, которая кодируется кодером 4 и через КС и ЛС передается на ИСЗ.
А коррекцию отклонений ИСЗ, по азимуту и высоте, от точки должного своего стояния на ГСО и относительно РЛС2, проводят аналогичным образом, с помощью, соответственно: УПФ3; УПФ4; УПФ5; УПФ6 и УПФ7; УПФ8; УПФ9; УПФ10 с пересекающимися полосами пропускания, рис.6.3. б), следующим образом.
Пусть, например, АО=ВО=МО=ДО=15км и они перпендикулярны друг другу и ЯМ=ЯД. При этом на выходе СМ2 будет сформирован сигнал биений с частотой FМД1=ЯМg2/C - ЯДg2/C=0. Пусть, например, ИСЗ сместился, по азимуту, влево относительно РЛС2 на 15км. При этом на выходе СМ2 будет сформирован сигнал биений с частотой: FМД2=(√ЯП2+МД2=40000011,25м)g2/C-ЯПg2/C=5000001,406Гц-5000000Гц=1,406Гц, который может быть выделен УПФ3 с: fц3=1,406Гц; fн3=1,392Гц и fв3=1,42Гц. А вот если параллельно УПФ3 разместить УПФ4 с: fц4=1,42Гц; fн4=1,406Гц и fв4=1,434Гц, то тогда оба фильтра будут одновременно выделять сигналы биений с частотами от 1,406Гц до 1,42Гц, при отклонении ИСЗ от 30км до 30,08км от точки должного своего стояния. Т. е. отклонениям на (30,08-30)км=80м соответствует разность частот (1,42-1,406)Гц=0,014Гц. При применении еще двух фильтров - УПФ5 и УПФ6 с fц5=1,434Гц и fв5=1,446Гц и такими же полосами пропускания, будут образованы три интервала пропускания сигналов биений: первый от 1,406Гц до 1,42Гц; второй от 1,42Гц до 1,434Гц и третий от 1,434Гц до 1,446Гц, что позволяет: при обнаружении сигнала биений только на первом интервале заключить о том, что корректировать местоположения ИСЗ не надо; при обнаружении сигнала биений только на втором интервале заключить о том, что необходимо провести коррекцию местоположения ИСЗ и его смещают, например, вправо, и если после этого сигнал биений появляется на первом интервале, то проведение корректировки прекращают, а если сигнал биений появляется на третьем интервале, то проводят коррекцию в обратном направлении, т. е. смещают ИСЗ влево; на в 2 раза большую величину, до появления сигнала биений на первом интервале. При этом точность установки ИСЗ определяется, в данном случае, 80м от удаления ИСЗ, в данном случае, 15км от точки должного его стояния, которое, очевидно, можно уменьшить, посредством уменьшения расстояний между приемными антеннами РЛС2. Однако это приведет к уменьшению центральных частот фильтров и х уменьшению полос пропускания, что в свою очередь приведет к увеличению времён установления сигналов на выходах фильтров, что в принципе допустимо, так как отклонения ИСЗ от точки должного стояния проходят, относительно времён установления, медленно. Аналогичным образом корректируют местоположение ИСЗ и по высоте, с помощью <гребёнки фильтров> из УПФ7...УПФ10. При этом информацию, сформированную на выходах <гребёнок фильтров>, через второй и третий кодеры, КС и ЛС, в виде корректирующих команд, передают на ИСЗ.
Следует отметить, что даже при отклонении ИСЗ на 15км от точки должного его стояния, в данном случае, точность установки ИСЗ определится величиной: 3600х15км/2πхЯПх2π=0,020, а также то, что перспектива использования в РЛС2 НЛЧМ2 сигнала с повышенной частотой Fм модуляции более выражена, так как фильтрами выбираются частоты сигналов биений, формируемые отражениями от ИСЗ, удаление Нi и местоположение которого с высокой точностью заведомо известны, а удаления объектов, Нi, маловероятны, а также скоротечны (объекты – спутники могут <стоять>. сколь угодно долго, только на ГСО орбитах)
Установить факт ракетного нападения можно также и при использовании на ИСЗ, вместо антенны <О1>, узконаправленной антенны <О3> с электронным образом управляемой её ДН. При этом, при сканировании и облучении МБРi узким лучом, сигналы биений, всего лишь поочередно, будут выделяться теми же N УПФ. А в остальном факт установления ракетного нападения будет таким же.
Очевидно, что если параллельно антенне <О3> подключить такую же антенну <О4> и направить её в сторону от Земли, то, при отсутствии МБР, сигналы на выходах N УПФ будут соответствовать направлению луча ДН на появившейся в нём, например, астероид. И если потенциалы на выходах УПФ преобразовать в нули (0) и единицы (1) с помощью, например, усилителей ограничителей (УС) и закодировать, то сформированными кодами из ППЗУ можно извлекать записанную в ней информацию о местоположении астероида относительно ИСЗ.