
(Статья может редактироваться со временем по мере появления новой информации)
1.2.5.8. ОПРЕДЕЛЕНИЕ ПЕЛЕНГОВ ЦЕЛИ
Информация, формируемая на входах исполнительных устройств ИУ1 -:- ИУ48 всех восьми ОЧОЦ НЧР, рассмотренным в ст.№10, в виде 47-ми логических <0> и одной логической <1>, располагаемой на той или иной позиции между логическими <0>, может быть использована (как цифровой код) на прямую, или после преобразования, для выемки из, например, постоянно запрограммированных запоминающих устройств (ППЗУ): ППЗУХ; ППЗУY; и ППЗУZ, предварительно записанной в них информации о трёх координатах цели, оказавшейся в какой то момент времени на заданном удалении Дзад от излучателя НЛЧМ сигнала и в вычисленном заданном направлении от излучателя.
Определять помимо направления на цель ещё и её пространственные координаты необходимо при решении ряда задач. Так, например, с помощью системы орудийной наводки (СОН) можно автоматически отслеживать местонахождение цели и автоматически наводить орудие на цель. Но для осуществления первоначального захвата цели и начала функционирования СОН необходимо знать, хотя бы приблизительно, пространственные пеленги цели, т. е. её местоположение (смещение по осям X, Y и Z), например, относительно центра антенной системы <Октанта> с расположенной в нём системой координат и относительно выбранного направления, пусть, на север, или ОЮ как на рис.1.27 в предыдущей ст.№11. Очевидно, что только при знании пространственных пеленгов цели можно установить ствол орудия в нужном направлении на цель, посредством смещения его по осям: Х, Y и Z на соответствующие расстояния.
Организовать пространственную пеленгацию цели можно, например, по структурной схеме, приведённой на рис.1.29 и включающей: описанный в моей ст.№10 формирователь разностных частот сигналов биений (ФРЧ), выход которого через один из формирователей метки времени (ФМВ), описанный ранее в ст.№7, подключен к входам разрешения начала работы частотомеров в ФРЧ, и к входам описанных в ст.№10 ООЦ и 8-ми ОЧОЦ. А также включающий блок программируемых постоянно запоминающих устройств (ППЗУ), по крайней мере,
состоящий из трёх ППЗУ: ППЗУX, ППЗУY и ППЗУZ, входы списывания информации из которых подключены к 48-ми выходам ОЧОЦ, на которых формируется, как в описанном в моей ст.№10 НЧР, 48-ми позиционный десятичный код, который, при необходимости, может быть преобразован в двоичный, и под действием которого из всех трёх ППЗУ списывается хранящаяся в них ранее записанная в них информация о 48-ми пеленгах цели, находящейся на заданном удалении Дзад от центра антенной системы <Октанта> ( от антенны <О>).
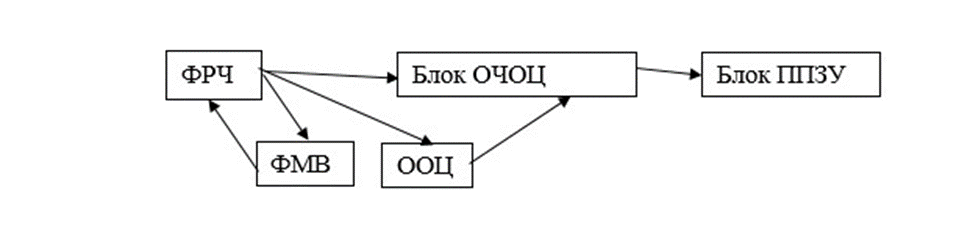
Рис.1.29.
Осуществить определение пространственных координат цели (пеленгов цели) можно, по крайней мере, тремя способами.
Один описан выше, с помощью, в принципе, нетрадиционного частотного радиолокатора, описанного в моей ст.№10.
Описанный выше способ определения пеленгов цели необходимо реализовывать тогда, когда цель необходимо обнаруживать при её нахождении на ближних рубежах подлёта к излучателю НЛЧМ сигала, например, при решении задачи по активной защите объектов типа танков, когда цель приближается к объекту с огромной радиальной скоростью и времени на сбор о ней полезной информации практически нет (сотые доли секунды).
А второй и третий способы, при использовании цифрового или аналогового нетрадиционных частотных радиолокаторов с повышенной разрешающей способностью по направлению на цель, рассмотренных в моей предыдущей ст,№11, необходимо реализовывать тогда, когда цель находится на дальних рубежах от излучателя НЛЧМ сигала, например, при решении задачи по активной защите объектов от, например, нарушителей границ охраняемого объекта, когда цель приближается к объекту с небольшой радиальной скоростью (например, квадрокоптор – нарушитель <<хулиган>> или человек, решивший похитить выставленную в музее на показ ценную охраняемую картину и находящийся от неё ещё на значительном расстоянии) и времени на сбор о ней (о цели) полезной информации вполне достаточно (секунды).
В принципе, любой из ранее отмеченных в моей ст.№11 нетрадиционных частотных радиолокаторов (НЧМР) может выполнить функцию определения пространственных пеленгов (координат) цели, если в данных НЧМР заменить ППЗУ <<направлений на цель>> на три ППЗУ: ППЗУX; ППЗУY и ППЗУZ с запаралеленными входами управления (списывания информации из ППЗУ) и на них (взоды) подавать формируемый цифровой код управления (ЦКУ). ППЗУ: ППЗУX; ППЗУY и ППЗУZ, с заранее записанными в них пеленгами (координатами) каждой выбранной точки поверхности сферы с заданным радиусом Дзад, в районе которых может в любой момент времени та, или иная, цель.
Очевидно, чтобы не терять информацию о пространственных направлениях на цель можно входы ППЗУ: ППЗУX; ППЗУY и ППЗУZ, объединить (запаралелить) с входами ППЗУ <<направлений на цель>>.
Очевидно также и то, что при необходимости знания пространственных пеленгов цели при нахождении цели на разных удалениях цели от источника излучения, необходимо иметь Nкомплектов ППЗУ: ППЗУX; ППЗУY; ППЗУZ и ППЗУ <<направлений на цель>>. Но зато, даже при двух комплектах ППЗУ, можно расширить функциональные возможности НЧР, например, за счет появления возможности определения с промахом, или точно, приближается цель к излучателю НЛЧМ сигнала, что при решении ряда задач просто необходимо. Так, например, при решении задачи по активной защите объектов от нападающих боеприпасов (НБ) посредством запуска навстречу НБ в нужный момент времени защитного боеприпаса (ЗБ), задача по определению промаха цели (НБ) является актуальной, так как позволяет более экономно расходовать запас не безграничного количества ЗБ.