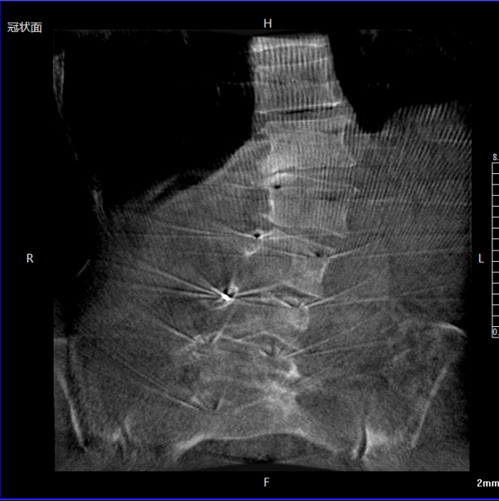
Качество визуализации 3D C-дуги имеет решающее значение для современной ортопедии, травматологии и малоинвазивной хирургии позвоночника. Несмотря на внешнее сходство многих систем по техническим характеристикам, уровень оптимизации качества 3D-изображений C-дуги может значительно различаться, что напрямую влияет на точность хирургических манипуляций, достоверность реконструкции и принятие интраоперационных решений. Понимание инженерных, физических и системных факторов, влияющих на качество изображения, является критически важным для хирургов, радиологов и биомедицинских инженеров.
Два технических принципа неизменно лежат в основе высокопроизводительной 3D-визуализации:
- Оптимизация качества визуализации 3D C-дуги
- Стабильный механизм высокопоточной экспозиции для обеспечения постоянного качества изображений 3D C-дуги
3D C-дуга Perlove наглядно демонстрирует практическую реализацию этих принципов, обеспечивая надежную визуализацию без артефактов.
1. Физические и инженерные принципы, влияющие на качество изображений 3D C-дуги
1.1 Поток фотонов и стабильность анодного тока
Высокоточная 3D-визуализация требует поддержания стабильного потока фотонов на протяжении сотен последовательных проекций. Пиковые значения напряжения (кВ) и тока трубки (мА) сами по себе не гарантируют качество — критически важны равномерность и линейность всех экспозиций. Колебания анодного тока более чем на ±2 % снижают контрастное разрешение, вызывают полосовые артефакты и ухудшают визуализацию тонких деталей трабекулярной кости или малых имплантов.
1.2 Мощность генератора и тепловое управление
Непрерывные 3D-сканирования создают значительные тепловые нагрузки. Генератор должен поддерживать стабильность напряжения и тока, предотвращая снижение выходной мощности в процессе сканирования. Недостаточное тепловое управление приводит к неравномерной экспозиции, нестабильной реконструкции и появлению артефактов. 3D C-дуга Perlove интегрирует передовые системы охлаждения и отвода тепла, обеспечивая непрерывную высокопоточную экспозицию без ухудшения характеристик рентгеновской трубки.
1.3 Механическая точность и стабильность гентри
Механическая точность является ключевым фактором оптимизации качества изображений 3D C-дуги. Для предотвращения двойных контуров кортикального слоя, размытости суставов или смещения винтов требуются субмиллиметровая точность траектории и угловая точность менее одного градуса. Высокоточные энкодеры и жесткая конструкция гентри критически важны для исключения вибрационных искажений во время быстрых вращательных движений.
1.4 Характеристики детектора и DQE
Плоскопанельные детекторы должны выдерживать сотни быстрых экспозиций, сохраняя временную однородность, минимальный лаг и стабильный темновой ток. Производительность детектора напрямую влияет на пространственное разрешение, отношение контраст/шум и динамический диапазон. Эффективная оптимизация качества изображений 3D C-дуги требует стабильного отклика детектора по всему полю зрения и при всех углах проекции.
2. Оптимизация визуализационной цепочки на системном уровне
2.1 Интеграция подсистем
Высококачественная 3D-визуализация достигается не за счет одного компонента, а благодаря оптимизации всей визуализационной цепочки, включающей:
- рентгеновский генератор и высокопоточную трубку;
- плоскопанельный детектор;
- гентри и вращательную механику;
- геометрическую калибровку;
- алгоритмы реконструкции;
- коррекцию рассеяния и упрочнения пучка.
Слабое звено в любой подсистеме приводит к распространению ошибок на весь процесс реконструкции.
2.2 Геометрическая калибровка и точность траектории
Точная 3D-реконструкция требует детального знания геометрии системы «источник–детектор». Отклонения всего на 0,3° или 0,5 мм могут искажать объемные изображения и снижать точность хирургической навигации. Непрерывные процедуры калибровки и высокоточные энкодеры обеспечивают стабильную оптимизацию качества визуализации 3D C-дуги.
2.3 Алгоритмы реконструкции
Алгоритмы преобразуют исходные проекционные данные в объемные изображения. Метод фильтрованной обратной проекции (FBP) обеспечивает быструю реконструкцию, но чувствителен к шуму и металлическим артефактам. Итеративная реконструкция (IR) улучшает подавление шума и разрешение. Алгоритмы подавления металлических артефактов (MAR) минимизируют полосы, вызванные имплантами. Дополнительная компенсация движения и моделирование шума further повышают четкость изображения.
3. Стабильный механизм высокопоточной экспозиции для постоянного качества изображений
3.1 Значение стабильности потока
Стабильная высокопоточная экспозиция обеспечивает однородную градацию серого и постоянный контраст во всех проекциях. Колебания приводят к артефактам реконструкции, ошибкам в оценке переломов и неточностям при установке имплантов.
3.2 Тепловое и электрическое управление
Во время непрерывных 3D-сканирований рентгеновская трубка генерирует значительное количество тепла. Надежное тепловое управление предотвращает автоматическое снижение мощности, поддерживая стабильный механизм высокопоточной экспозиции и постоянное качество изображений 3D C-дуги на протяжении всего сканирования.
3.3 Клинические последствия нестабильной экспозиции
- Хирургия позвоночника: стабильная экспозиция снижает частоту перфорации ножек позвонков с 8–12 % до менее чем 2 %, повышая надежность навигации.
- Травмы таза и вертлужной впадины: точная оценка переломов и установка имплантов зависят от однородной интенсивности и подавления артефактов.
- Педиатрия: низкая плотность костной ткани у детей требует стабильной экспозиции для предотвращения ошибок интерпретации кортикальных границ, что критично для планирования операции.
4. Клинические области применения и влияние
4.1 Хирургия позвоночника
Высокоточная визуализация обеспечивает точную установку винтов, достоверную оценку позвонков и надежную регистрацию навигации. Это снижает количество интраоперационных корректировок и послеоперационных осложнений.
4.2 Травмы таза и вертлужной впадины
Точная репозиция переломов и корректная установка имплантов зависят от качества 3D-реконструкций. Интраоперационная точность напрямую влияет на результат лечения и снижает риск повторных операций.
4.3 Педиатрическая визуализация
Низкая плотность костной ткани у детей повышает чувствительность к колебаниям экспозиции. Оптимизированный стабильный механизм высокопоточной экспозиции обеспечивает безопасную и надежную визуализацию, снижая риск неправильной интерпретации костных структур.
5. Расширенные аспекты оптимизации
5.1 Совместное влияние аппаратного и программного обеспечения
Оптимальное качество изображений 3D C-дуги достигается за счет синергии аппаратной стабильности и алгоритмов реконструкции. Даже незначительные колебания тока трубки, неоднородность детектора или смещение гентри могут привести к ошибкам реконструкции.
5.2 Баланс между дозой и качеством изображения
Поддержание высокого качества изображений должно сочетаться с минимизацией лучевой нагрузки. Стабильная высокопоточная экспозиция позволяет снизить суммарную дозу за один скан при сохранении высокой информативности изображения.
5.3 Подавление артефактов
Металлические импланты, движение пациента и упрочнение пучка вызывают артефакты. Системный дизайн и алгоритмы реконструкции должны включать коррекцию движения, MAR и подавление шума для сохранения клинической применимости без избыточной постобработки.
6. Ключевые принципы — резюме
Высокоточная 3D-визуализация C-дуги достигается благодаря комплексной системной инженерии, а не только за счет пиковых технических характеристик. Два ключевых принципа:
- Оптимизация качества визуализации 3D C-дуги
- Стабильный механизм высокопоточной экспозиции для обеспечения постоянного качества изображений 3D C-дуги
Благодаря точному управлению генератором, стабильности рентгеновской трубки, эффективному тепловому управлению, высокой механической точности, калибровке детектора и передовым алгоритмам реконструкции, 3D C-дуги Perlove обеспечивают воспроизводимую, свободную от артефактов интраоперационную визуализацию. Это позволяет сделать хирургические процессы более безопасными, точными и эффективными в спинальной, тазовой и педиатрической хирургии.