I. Базовое требование «прецизионности» при выполнении PVP / PKP
Перкутанная вертебропластика (PVP) и перкутанная кифопластика (PKP) в настоящее время являются одними из наиболее широко применяемых малоинвазивных методов лечения компрессионных переломов позвонков, которые чаще всего обусловлены остеопорозом, опухолевыми поражениями или травматическими повреждениями. Робот-ассистированная вертебропластика и кифопластика, как ключевой компонент навигационной малоинвазивной хирургии позвоночника (Image-Guided Minimally Invasive Spine Surgery), трансформирует данные вмешательства за счёт интеграции трёхмерной визуализации, интеллектуального планирования и высокоточного роботизированного выполнения. На практике использование роботической поддержки позволяет достичь более высокой точности пункции, оптимального распределения костного цемента и повышенного уровня безопасности, тем самым поднимая прецизионность малоинвазивных вмешательств на позвоночнике на новый уровень.
В основе PVP / PKP лежат следующие ключевые цели:
- восстановление стабильности позвонка;
- купирование болевого синдрома;
- улучшение или сохранение высоты позвонка и оси позвоночника;
- обеспечение достаточного и равномерного заполнения костным цементом при соблюдении условий безопасности.
Однако с технической точки зрения PVP / PKP не относятся к вмешательствам «низкой сложности». Напротив, это высокоточные операции на позвоночнике, критически зависящие от правильного выбора траектории пункции, точного контроля угла введения инструмента и надёжной пространственной ориентации на всех этапах процедуры.
II. Технические ограничения традиционной «ручной» PVP / PKP
Несмотря на длительный клинический опыт выполнения PVP / PKP, традиционные вмешательства, выполняемые вручную и основанные исключительно на рентгеноскопии, по-прежнему имеют ряд принципиальных ограничений.
1. Высокая зависимость точности пункции от опыта хирурга
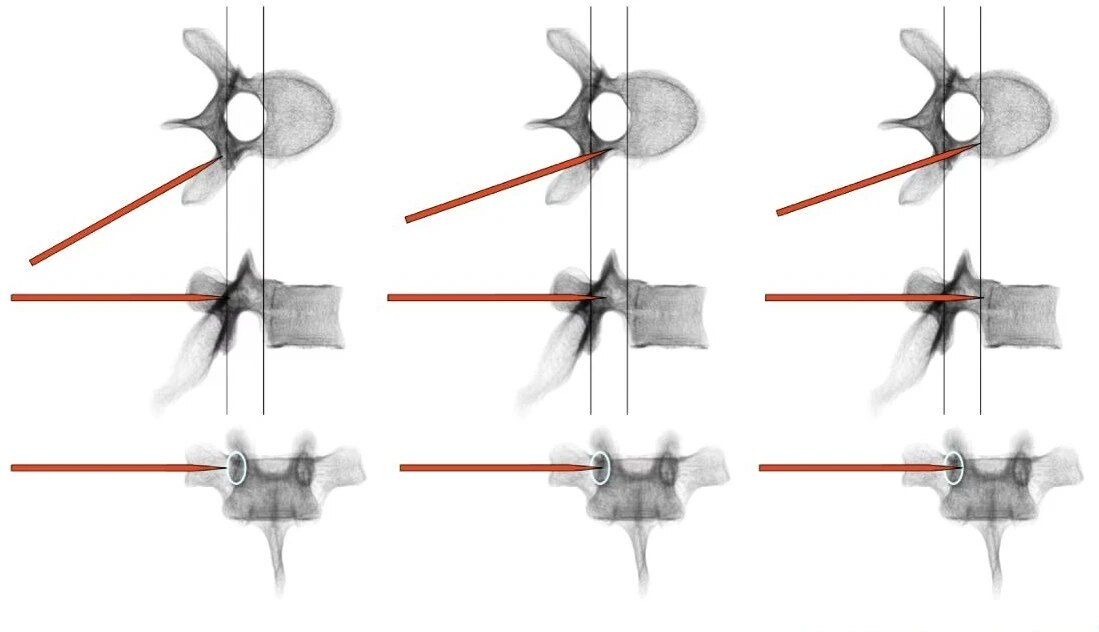
В первую очередь, точка входа и угол пункции определяются на основе двумерных рентгеноскопических изображений. В результате хирург вынужден в значительной степени полагаться на собственное трёхмерное анатомическое воображение структуры ножки позвонка. При выраженном остеопорозе, коллапсе позвонка или анатомических вариациях допустимая ошибка минимальна, а риск отклонения траектории существенно возрастает.
2. Многократные попытки пункции и частая флюороскопия
Для подтверждения безопасности пункции при ручной технике часто требуются неоднократные корректировки положения инструмента. Это неизбежно приводит к повторным попыткам пункции, повышая риск повреждения ножки позвонка, окружающих мягких тканей и близлежащих критически важных структур. Одновременно значительно увеличивается суммарная лучевая нагрузка как на пациента, так и на медицинский персонал вследствие частого рентгенологического контроля.
3. Ограниченные углы пункции и влияние на распределение цемента

Ограничения по углу введения или отклонения траектории напрямую влияют на введение костного цемента. Неоптимальный угол часто затрудняет достижение равномерного распределения цемента в теле позвонка. В результате может формироваться локально повышенное давление, что увеличивает риск утечки цемента и снижает биомеханическую стабильность. Принципиально важно, что данные проблемы не могут быть полностью устранены лишь за счёт хирургического опыта, поскольку они обусловлены самой парадигмой традиционной ручной техники.
III. Техническая логика робот-ассистированной хирургии: от опыта к данным
Робот-ассистированная хирургия не означает автоматического выполнения процедур PVP / PKP. Напротив, за счёт интеграции трёхмерной визуализации, интеллектуального планирования и стабильного исполнения полностью перестраивается весь рабочий процесс пункции и вмешательства.
В своей основе данная техническая логика может быть сформулирована следующим образом:
Видеть чётче → рассчитывать точнее → выполнять стабильнее
Таким образом, происходит переход от принятия решений, основанных на субъективном опыте, к вмешательствам, основанным на объективных данных. В этом контексте робот-ассистированная вертебропластика и кифопластика является важным этапом эволюции навигационной малоинвазивной хирургии позвоночника.
IV. Ключевая клиническая ценность роботической поддержки при PVP / PKP
1. Прецизионное планирование траектории пункции на основе 3D-визуализации
С использованием интраоперационной трёхмерной визуализации (например, 3D C-дуги) система позволяет чётко оценить:
- форму позвонка и степень его коллапса;
- внутренние и наружные границы ножки позвонка;
- позвоночный канал и прилегающие критически важные анатомические структуры.
На основе этих данных обеспечивается:
- оптимальный выбор точки входа;
- точный расчёт угла и глубины пункции;
- верификация безопасного пункционного коридора.
В результате планирование пункции переходит от субъективной оценки к полностью визуализированному и проверяемому процессу, что и составляет суть навигационной малоинвазивной хирургии позвоночника.
2. Стабильное наведение роботизированной руки и повышение успешности пункции с первой попытки
В отличие от ручной техники, даже минимальное отклонение на 1–2 градуса может привести к значительной погрешности на глубине тела позвонка. Роботизированная рука играет здесь ключевую роль, обеспечивая:
- точную фиксацию запланированной траектории;
- устранение отклонений, вызванных тремором рук, утомляемостью или изменением позы хирурга;
- поддержание постоянного угла и направления пункции на протяжении всей процедуры.
В результате существенно повышается вероятность успешной пункции с первой попытки, а количество повторных проколов и связанных с ними осложнений заметно снижается. Именно эта стабильность подчёркивает клиническую ценность робот-ассистированной вертебропластики и кифопластики в сложных клинических условиях.
3. Оптимизация распределения костного цемента и биомеханических результатов
Точная и заранее спланированная траектория пункции позволяет:
- использовать больший и более безопасный угол введения;
- добиться симметричного и равномерного распределения цемента в теле позвонка;
- снизить риск утечки цемента, обусловленной локально повышенным давлением.
Для процедур PKP это дополнительно означает:
- более эффективное восстановление высоты позвонка;
- лучшее сохранение формы позвонка;
- более благоприятную коррекцию угла Cobb.
С биомеханической точки зрения именно качество распределения костного цемента определяет долговременную стабильность позвонка. Следовательно, роботическая поддержка существенно повышает эффективность навигационной малоинвазивной хирургии позвоночника.
4. Существенное снижение лучевой нагрузки
Благодаря заранее чёткому планированию траектории и стабильному выполнению пункции:
- значительно сокращается частота интраоперационной рентгеноскопии;
- практически устраняются повторные корректировки по принципу «проб и ошибок».
В результате снижается лучевая нагрузка на пациента, а также существенно уменьшаются долгосрочные профессиональные радиационные риски для хирургов.
V. Значение роботической поддержки в сложных клинических случаях
Особенно выраженные преимущества робот-ассистированная PVP / PKP демонстрирует в сложных клинических ситуациях, таких как:
- тяжёлый остеопороз;
- выраженный коллапс или деформация позвонков;
- многоуровневое поражение позвоночника;
- анатомические вариации;
- случаи высокого риска, требующие точного контроля распределения цемента.
В подобных условиях роботическая поддержка является не просто удобным инструментом, а критически важным и системным уровнем управления рисками, подчёркивающим уникальные преимущества робот-ассистированной вертебропластики и кифопластики.
VI. Заключение: робот — не «дополнение», а основа прецизионной малоинвазивной хирургии
В целом ценность робот-ассистированной хирургии при PVP / PKP выходит далеко за рамки повышения точности выполнения процедуры. Её подлинное значение заключается в следующем:
- расширение запаса хирургической безопасности;
- снижение неопределённости, связанной с индивидуальными различиями операторов;
- повышение стабильности и воспроизводимости клинических результатов;
- продвижение стандартизации и интеллектуального развития малоинвазивной хирургии позвоночника.
По мере того как спинальные вмешательства вступают в эпоху миллиметровой точности, сама по себе стабильность и контролируемость выполнения становятся ключевой клинической ценностью. В этом контексте робот-ассистированная вертебропластика и кифопластика представляет собой важнейший этап развития навигационной малоинвазивной хирургии позвоночника.