
(Статья может редактироваться со временем по мере появления новой информации)
1.2. НЕТРАДИЦИОННЫЙ ЧАСТОТНЫЙ МЕТОД РАДИОЛОКАЦИИ
Задача по улучшению возможностей методов радиолокации, в том числе и частотного, всегда была, есть и будет актуальной из-за расширения объема полезной информации, всё более трудно решаемой, но тем более привлекательной, что подтверждается ниже приведённым.
При нетрадиционном частотном методе радиолокации (НЧМР), например, при приближении цели к источнику излучения с радиальной скоростью Vr, проводят обнаружение цели на заданном удалении Дзад, плюс (+) Vrtз, от источника излучения, посредством определения (измерения) сигнала биения с заданной (известной) частотой Fбизв и фиксирования момента окончания проводимого измерения, и по истечении известного времени tз, одновременно:
а) констатируют факт того, что цель находится на заданном удалении Дзад от источника излучения ЧМ сигнала;
б) определяют радиальную скорость Vr цели, посредством выделения и измерения частоты Доплера на удалении Дзад от источника;
в) определяют направление на цель (в пространстве, в двух плоскостях. или в одной плоскости, в зависимости от решаемой задачи) и, при необходимости, определяют пеленги цели в соответствующих плоскостях.
Аналогичным образом можно осуществить вышесказанное и при удалении цели от источника излучения, но на заданном удалении Дзад, минус (-) Vrtз, от источника излучения, что позволяет получать информацию о цели, как в первом, так и во втором случаях, не обращая внимания на скорости перемещения цели.
При этом нетрадиционный частотный метод (способ) радиолокации может быть охарактеризован, по крайней мере, формулами изобретения [31, 32], которые описывают способы возможного одновременного определения: дальности до цели; радиальной скорости цели; местоположения цели в пространстве и её пространственные пеленги (см. формулы в конце статьи <<О определении направления на цель>> и статьи <<О определении пеленгов цели>>).
1.2.1. ОПРЕДЕЛЕНИЕ ДАЛЬНОСТИ ДО ЦЕЛИ ПРИ НЧМР
Определение дальности до цели и её радиальную скорость при ТЧМР осуществляют посредством измерения разности частот прямого и отраженного сигналов от времени при модуляции сигнала по закону симметричной треугольной кривой. Причём измерение разностей частот F1 и F2 осуществляют раздельно, как при уменьшении частоты f зондируемого ЧМ сигнала (F1), так и при возрастании частоты f (F2). Разности частот F1 и F2, позволяющие определить частоты Fд [2, (1.9)] биений и частоты Fд Доплера [2, (1.9)] по формулам
Fд=0,5(F1 + F2), [2, (1.15)]
Fд=0,5(F1 - F2) [2, (1.16)]
и дальности до цели и её радиальные скорости по формулам [2, (1.17)] и [2, (1.18)].
При НЧМР дальность до цели определяют не посредством проведения ряда различного рода измерений и вычислений, как при ТЧМР, а посредством констатации факта того, что цель, например, приближающаяся к РЛС с неизвестной радиальной скоростью Vr и обнаруженная на РЛС при её нахождении на неизвестном удалении Дi от РЛС
Дi=Дзад+tзVr, (1.1)
посредством обнаружения на РЛС заданного сигнала биения с известной частотой
Fбизв=g2(Дзад+tзVr)/с-2fVr/с=g2Дзад/с, (1.2)
через известное время tз после обнаружения цели на РЛС, будет точно находится на известном заданном удалении Дзад от РЛС
Дзад=сFбзад/2g, (1.3)
где, соответственно: Fм – частота модуляции; fд – девиация частоты; g=Fмfд- скорость изменения частоты f излучаемого РЛС непрерывного линейно частотно модулированного (НЛЧМ) сигнала, частота f которого изменяется по закону ограниченной линейно возрастающей прямой, а tз=f/Fмfд=f/g – известное время, за которое свет (радиоволны), со скоростью с, проходят расстояние в f/fд раз большее чем расстояние S однозначного определения дальности до цели.
S=с/2Fм (1.4)
Т. е., очевидно, зафиксировав момент возникновения и обнаружения на РЛС сигнала биения с известной частотой Fбизв, можно утверждать, что:
а) через известное время tз цель будет находиться на известном заданном удалении Дзад от РЛС;
б) обнаруживаемый сигнал биений (биение) с известной частотой Fбизв не зависит от частоты Доплера (от скорости перемещения цели) и может быть выделен УПФ с максимально узкой полосой пропускания ∆fупф, зависящей, в данном случае, только от необходимого времени tоб обнаружения сигнала биения
tоб=1/(1-:-3)∆fупф, (1.5)
что позволяет получить максимально высокую чувствительность приемника РЛС и гораздо лучшую чем при ТЧМР;
При этом РЛС (дальномер) должна содержать, по крайней мере:
а) передающую и приёмную антенны НЛЧМ сигналов, либо только одну приемопередающую антенну <О>;
б) обнаружитель сигналов типа, приведённых ниже в разделе 1.2.1.1.1;
в) формирователь биений типа, приемопередающих модулей, приведённых выше в разделе 1.1.1.1, с входами, подключенными к антеннам и выходом к УПФ, либо выполненный, например, в виде (рис.1.4): приемопередающей антенны <О>, вход которой работающий на передачу подключен к мощному выходу передатчика (ПД) НЛЧМ сигнала, а выход работающий на прием к входу СВЧ смесителя (ССМ), второй вход которого подключен к выходу ПД малой мощности, а выход ССМ подключен к входу УПФ;
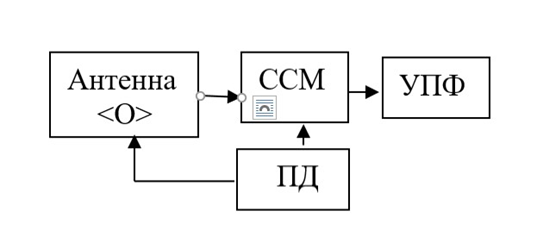
Рис.1.4.
Причём передатчики НЛЧМ сигнала, в том числе в приемопередающих модулях, могут быть не перестраиваемыми (ПД), либо перестраиваемыми, например, дискретно (ДПД) типа, приведённых ниже в разделе 1.2.1.1.2. ДПД формирующие НЛЧМ сигналы с необходимыми задаваемыми параметрами, что позволяет измерять текущие дальности до цели при НЧМР используя всего лишь один УПФ и один обнаружитель сигналов биений (при последовательном нетрадиционном способе измерения текущих дальностей). При параллельном нетрадиционном способе измерения текущих дальностей, очевидно, потребуется всего лишь один ПД и N УПФ с разными центральными частотами их полос пропускания и N обнаружителей сигналов биений, что громоздко, но иногда оправдано, особенно при определении небольшого количества заданных дальностей (например, при организации активной защиты объектов от НБ [6]).
Для осознания актуальности НЧМР и его возможностей рассмотрим более подробно принципы и схемы, позволяющие реализовать обнаружители сигналов биений, дискретно перестраиваемые передатчики и различного рода измерители частотных радиолокаторов.
1.2.1.1. Устройства для реализации нетрадиционных частотных радиолокаторов
1.2.1.1.1. ОБНАРУЖИТЕЛИ СИГНАЛОВ БИЕНИЙ
Обнаружители, в том числе, гармонических сигналов (биений), формирующие короткие импульсы (метки времени) в моменты обнаружения цели, являются обязательными частями нетрадиционных частотных радиолокаторов и совместно с формирователем сигналов биений образуют своеобразный нетрадиционный частотный дальномер. Обнаружители могут быть как аналоговыми, так и дискретными (импульсными), реализованными как традиционными методами, так и нетрадиционными (оригинальными, см. разделы 1.2.1.1.1.1 и 1.2.1.1.1.2). Главное, что требуется от обнаружителей биений, по крайней мере, таких, которые будут предназначены для решения задач, рассматриваемых в данной блог-книге, это обнаружение биений с максимально возможной точностью, за минимально короткий интервал времени.
1.2.1.1.1.1. СЕКЦИОНИРОВАННЫЙ СЕЛЕКТОР ИМПУЛЬСОВ
ПО ДЛИТЕЛЬНОСТИ
При определении дальности до цели любым радиодальномером, всегда интересует его потенциальная разрешающая способность по дальности, выведенная при использовании формулы [2, (1.1)] и определяемая выражением:
∆Д=Сtзп/2, (1.6)
а также зависящая от длительности интервала (импульса) времени tзп запаздывания. Так, например, при tзп=10-8с (10 наносекунд), ∆Д=15см.
Сформировать импульс длительностью порядка 10нс можно, а вот измерить (обнаружить), при современной элементной базе (при времени tрз=10нс естественной задержки распространения сигнала, например, в отечественных микросхемах 133 серии), проблематично, если вообще возможно.
Одним и, очевидно, единственным на настоящее время способом решения проблемы, определяемой необходимостью обнаружения коротких импульсов, соизмеримых с длительностями tрз естественных задержек распространения сигналов по микросхемам, является способ, реализуемый с помощью применения секционированного селектора импульсов [8], который позволяет обнаруживать видеоимпульсы длительностью tи=tзп=tрз и паузой между импульсами не менее 2tрз. Селектор импульсов, который из-за простоты своей структуры и электрической схемы, а также разнообразия областей возможного применения, вполне может быть реализован в виде конкретной микросхемы той или иной серии
и выполнить роль обнаружителя сигнала биения, который, очевидно, предварительно должен быть, по крайней мере, усилен до уровня логической единицы, чтобы мог был бы быть обработан цифровыми микросхемами.
Здесь интересно отметить, что данный оригинальный способ обнаружения самого короткого в мире импульса будет действенен во все времена, пока люди будут пользоваться цифровыми микросхемами для обработки импульсных сигналов (будет улучшаться технология изготовления цифровых микросхем в части уменьшения их tрз и, соответственно, увеличения быстродействия микросхем, и длительность обнаруживаемого селектором импульса будет уменьшаться и оставаться соизмеримой с длительностью tрз). К сожалению такие рекорды, по крайней мере, в реестре рекордов России не регистрируются.
Рассмотрим работу секционированного селектора импульсов по длительности.
Пусть на вход селектора импульсов по а.с. №1083355 [8], имеющего, например, три каскада селекции (рис. 1.5), поступает последовательность импульсов (рис. 1.6. а), содержащая четыре импульса длительностью, соответственно: tзр; 3tзр; 3tзр и 2tзр с паузой между ними не менее 3tзр, где tзр – время естественной задержки прохождения импульса через ту или иную микросхему, на базе которой построены каскады селекции: 1-1; 1 – 2; 1 – i; N (tзр различных микросхем выбранной серии примерно равны).
Элементы 5 задержки каждого каскада селекции задерживают поступающие на их первые входы импульсы (рис. 1.6. а, в, д соответственно) на время tзр (рис. 1.6. б, г, е), а импульсы, представленные на рис. 1.6. в, д, ж, формируются посредством проведения операции логического умножения между импульсами, поступающими на входы элементов И7. Импульсы на выходах элементов И 7 несут информацию о том, что на селектор импульсов поступил импульс, больший по длительности наперед известной (заданной) величины. Импульсы, приведенные на рис. 1.6. з, и, к, формируются посредством операции логического суммирования между импульсами, поступающими на входы элементов ИЛИ 6. Инверторы 8 производят инвертирование импульсов, поступающих с выходов элементов ИЛИ 6 (рис. 1.6. з, и, к соответственно) и задержку на время tрз (рис. 1.6. л, м, н). Импульсы, приведенные на рис. 2.8. о, п, р, формируются посредством проведения операции логического суммирования с последующим инвертированием между импульсами, поступающими на одни входы элементов ИЛИ-НЕ 9 (рис. 1.6. л, м, н соответственно) и импульсами, поступающими на другие их входы (рис. 1.6. в, д, ж соответственно) и импульсами, поступающими на третьи их входы (рис. 1.6. и, к,
Рис.1.5.
Рис. 1.6.
соответственно). Импульсы на выходах элементов ИЛИ-НЕ 9 несут информацию о том, что на селектор импульсов поступили импульсы конкретной величины той или иной длительности, в частности длительностью: tзр, 3tзр, 3tзр и 2tзр, микросхем. Информация об указанных импульсах снимается соответственно с выходов элементов ИЛИ-НЕ 9 первого, третьего и второго каскадов селекции последовательно во времени. Импульсы на выходах элементов ИЛИ-НЕ 9 появляются не только при поступлении на селектор импульсов конкретной длительности (рис. 1.6. а), но и при поступлении импульсов других длительностей, причем при поступлении импульсов длительностью tзр < tи < 2tзр информационный импульс формируется только на выходе элемента ИЛИ-НЕ 9 первого каскада селекции, при поступлении импульсов длительностью 2tзр < tи < 3tзр - только на выходе элемента ИЛИ-НЕ 9 второго каскада селекции, а при поступлении импульсов длительностью 3tзр < tи < 4tзр - только на выходе элемента ИЛИ-НЕ 9 третьего каскада селекции. При поступлении на селектор импульсов, больших 4tзр, информационные импульсы на выходе элементов ИЛИ-НЕ 9 каскадов селекции, кроме последнего, не формируются.
Секционированный селектор импульсов по длительности позволяет декодировать кодовые комбинации, составленные из коротких импульсов соизмеримых с естественными задержками микросхем, путем измерения импульсов с точностью до естественной задержки микросхем логических элементов, что приводит в случае использования селектора в цифровых системах связи к возможности увеличения числа временных каналов связи. А в случае использования селектора в цифровых радиолокационных системах – к наносекундным измерениям длительностей временных интервалов.
Очевидно, что точность обнаружения сигналов биений подобным образом определится временем tзр, если моменты обнаружения биений определять по моментам появления информационных импульсов на выходах секций селектора. А вот если обнаружение сигналов биений осуществлять, воспользовавшись интервалом, который разграничивает появление информационных импульсов на выходах соседних секций секционированного селектора импульсов, то точность обнаружения сигналов биений можно существенно повысить.
1.2.1.1.1.2. ФОРМИРОВАТЕЛЬ МЕТКИ ВРЕМЕНИ
С СЕЛЕКТОРОМ ИМПУЛЬСОВ
Обнаружить сигнал биений можно также цифровым обнаружителем реализованным оригинальным способом, блок – схема которого приведена на рис.1.7. Такой обнаружитель работает следующим образом.
При данном цифровом способе обнаружения сигнала [ХХХ] обнаруживают сигнал биений с частотой Fбi посредством селекции импульсов
рис.1.7.
секционированным селектором (СЕЛ) по а.с. №1083355 [8], который, будучи реализованный на базе, например, элементов 133 серии, имеющей естественную задержку распространения сигналов tзр=10нс, будет формировать на выходе первого своего каскада импульс - обнаружения сигнала частотой Fбi, при поступлении на его вход импульсов от tС1=10нс до tС2=20нс, не более и не менее. Т. е., например, если при Fбi=1,333МГц, видеоимпульсы длительностью 1/2Fбi=375нс задержать на 365нс линией задержки (ЛЗ) и логически перемножить, на элементе И, с незадержанными видеоимпульсами, то на выходе элемента И будут сформированы импульсы длительностью 10нс, обнаруживаемые СЕЛ. Отметим, что при частоте следования видеоимпульсов F1,299=1,299МГц длительностью 385нс и при их задержке на те же 365нс, на выходе элемента И будут сформированы импульсы длительностью 20нс, обнаруживаемые также СЕЛ. Так как на другие импульсы СЕЛ не реагирует, то, очевидно, можно считать, что объект обнаруживается с точностью, по дальности:
Добн2=Д(F1,333/Fб1,299 – 1). (1.7)
А УПФ, ПР, РГ, РВ1 и РВ2 выполняют те же самые функции, что и аналогичные устройства в цифровом обнаружителе, рассмотренном выше. При этом структурная схема ФМВ может быть изображена в виде прямоугольника, внутри которого отображены аббревиатуры: ФМВ – название устройства, Х – название входной шины и Y – название выходной шины.
Оригинальность рассмотренного обнаружителя определена применением в нем изобретенного автором оригинального секционированного селектора импульсов по длительности, защищенного авторским свидетельством за №1083355 [8], работа которого рассмотрена ниже, в следующем разделе.
1.2.1.1.1.3. ФОРМИРОВАТЕЛЬ ДВУХ МЕТОК ВРЕМЕНИ
С СЕЛЕКТОРОМ ИМПУЛЬСОВ
Обнаружить два сигнал биений, т. е. сформировать последовательно во времени две метки времени, при нахождении цели на разных заданных дальностях Д1 и Д2 от излучателя, при использовании всего лишь одного СЕЛ, можно ФМВ [ХХХ], блок – схема которого приведена на рис.1.8. Такой ФМВ работает следующим образом.
В исходном состоянии, например, когда цель приближается к дальней заданной Д1 точке её обнаружения, на входах управления электронных ключей (ЭК): ЭК1, ЭК2 и ЭК3 (рис.1.8) установлен логический 0, что позволят пройти сигналу биения с выходы узкополосного фильтра (УПФ2), через: преобразователь гармонического сигнала в меандр (ПГСМ2), делитель частоты повторения импульсов в меандре (ДЕЛ) и ЭК2 на входы ЛЗ и И15 и не позволят пройти через ЭК2 импульсам меандров с выхода ПГСМ1.
Рис.1.8.
При этом задержка импульсов линией задержки (ЛЗ) выбирается такой, чтобы на выходе И15 сформировался импульс длительностью, на который среагировал бы СЕЛ в момент нахождения приближающейся с радиальной скоростью Vr цели на удалении Д2+Vrtз от излучателя НЛЧМ сигнала. Так, например, импульсы ЛЗ должны задерживаться на время tлз=2Тб1 - tзр=365нс при: радиальной скорости Vr=4км/с цели; заданных расстояниях должного обнаружения цели Д1=2м и Д2=8м; параметрах НЛЧМ сигнала: f=100ГГц, g=1014Гц2 (обеспечиваемых, например, КВЧ модулем из раздела 1.1.1.1.1); частоте биения формируемого при обнаружении цели, при её нахождении на заданном удалении Д2 от излучателя, Fб2=2Д2Fмfд/с=5,333МГц и Fб2/4=1,333МГц; длительностях полупериодов частоты 0,25Fб2 сигнала равной Т=375нс (длительность импульсов на выходе ДЕЛ); селекторе импульсов по длительности (СЕЛ) реализованном по а.с.№1083355, на базе отечественных микросхем 133 серии, имеющих время естественной задержки распространения сигнала tзр=10нс. При этом на 1-ом выходе СЕЛ, при поступлении на его вход только импульсов длительностью от 10нс до 20нс, будет сформирован короткий импульс (метка времени) длительностью 2tзр=20нс, свидетельствующая об обнаружении цели на удалении Д2+Vrtз=12м от излучателя. Метка времени, которой ТР устанавливается в состояние с логической 1 на выходе, и которая разрешает пройти на выход ЭК2 уже только импульсам меандра с выхода ПГСМ1 и сформировать аналогичным образом вторую метку времени, при нахождении цели на более близком удалении Д1+Vrtз=6м от излучателя. Таким образом при приближении цели на входе сначала реле времени (РВ1) формируется метка времени, а затем на входе РВ3. РВ имеющие время выдержки tв=tз=f/g=10-3с, через которое срабатывают РВ2 и РВ4 формирующие импульсы длительностью, обеспечивающей работу последующих схем. При этом структурная схема ФМВ может быть изображена в виде прямоугольника, внутри которого отображены аббревиатуры: ФМВ – название устройства, Х1 – название входной шины и: Y3, Y4, – название выходных шин.
1.2.1.1.1.4. АНАЛОГОВЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ
Аналоговый обнаружитель сигналов узкополосного спектра частот [6], блок-схема которого приведена на рис.1.9. работает следующим образом
Рис.1.9. Блок - схема обнаружителя сигналов узкополосного спектра частот.
1 – генератор опорного сигнала; 2- НЧ смеситель; 3 - широкополосный фильтр; 4-усилитель – ограничитель; 5 - узкополосный полосовой фильтр (УПФ); 6 – амплитудный детектор; 7 – компаратор; 8 – формирователь импульса.
Пусть, например, с генератора опорного сигнала на первый вход низкочастотного (НЧ) смесителя поступает сигнал частотой f1, а на его второй вход исследуемые сигналы частотой f1±∆f1. Тогда на вход широкополосного фильтра с широкой полосой пропускания сигналов, после перемножения непрерывных сигналов в НЧ смесителе, поступят сигналы частотой 2f1±∆f1, которые далее преобразуются усилителем – ограничителем в меандр, содержащий, как известно, только нечетные гармоники. После чего УПФ, имеющим полосу пропускания не менее 21×2∆f1, пусть выделяет только 21УЮ гармонику сигнала частотой
F21=21×2f1± 21∆f1
и значительно подавляет все другие сигналы преобразования.
Амплитудный детектор преобразует переменное напряжение сигналов частотой F21 в постоянное напряжение, которое на компараторе сравнивается с опорным напряжением. При этом, если уровень сформированного постоянного напряжения превысит уровень опорного напряжения, то считают, что на вход обнаружителясигналов узкополосного спектра частот поступают сигналы в полосе частот от f1-∆f1 до f1+∆f1 и формируют короткий импульс на выходе формирователя импульсов. При этом время восстановления сигналов на выходе УПФ с общей полосой пропускания 21×2∆f1 определится, примерно, величиной
tвос1= 1/3×21×2∆f1
Очевидно, что сигналы полосы частот от от f1-∆f1 до f1+∆f1 можно обнаружить и напрямую, однако за более продолжительное время восстановления tвос2
tвос2= 1/3×2∆f1
Выигрыш во времени восстановления сигнала на выходе узкополосной системы, в данном случае в 21 раз, определяют преимущества метода обнаружения непрерывных сигналов с многократным увеличения их частоты, над методом обнаружения непрерывных сигналов без изменения их частоты, что в ряде случаев, имеет исключительное значение. Очевидно, что отмеченный выигрыш во времени восстановления сигнала на выходе узкополосной системы делает перспективным использование данного обнаружителя в приемных системах РЛС и особенно, в РЛС высокоскоростной радиолокации.
Обнаружители сигналов можно использовать в качестве формирователей меток времени (ФМВ) – коротких импульсов, относительно появления которых можно организовывать работу того или иного устройства в целом.
1.2.1.1.1.5. ЦИФРОВОЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ –
ФОРМИРОВАТЕЛЬ МЕТКИ ВРЕМЕНИ
Обнаружить сигнал биений можно также и цифровым обнаружителем, реализованным классическим способом [ХХХ],, блок – схема которого приведена на рис.1.10, который работает следующим образом.
При цифровом классическом способе обнаружения сигнала подсчитывают счетчиком импульсов (СЧ1) периоды частот, например, Тбi=1/Fбi сигналов биений за установленный интервал времени tизм и подсчитанное целое (Nсч=tизмТбi) количество периодов далее, на цифровом компараторе (ЦК), сравнивают с числом Nуст установленным на шине Х. И если оказывается что Nсч>Nуст, то метку времени не формируют, а если Nсч<Nуст, или при равенстве чисел, то формируют и считают сигнал биений обнаруженным. При этом максимальная ошибка обнаружения объекта по дальности определится как:
Добн1=С/g2tвос, (1.8)
где tизм – время измерения частот сигналов биений большее, или равное, tвос - времени восстановления сигналов биений на выходе узкополосного фильтра, выделяющего сигналы биений. А интервалы измерения, в виде последовательности импульсов измерения длительностью tизм и паузой между импульсами, например, в один период частоты сигнала генератора счетных импульсов (ГСИ), формируют схемой, в которой импульсы ГСИ постоянно подсчитываются СЧ2 нагруженным тремя дешифраторами (ДШ). При этом ДШ1 обнаруживает цифровое число, соответствующее 1,
Рис.1.10
ДШ2 – максимальному числу К импульсов, которое может подсчитать СЧ2, ДШ3– числу К-1. Таким образом на выходе триггера (ТР) формируется последовательность импульсов измерения, в течении длительности которых, через элемент И1, на СЧ1, с выхода преобразователя (ПР) гармонического сигнала в меандр – последовательность положительных импульсов длительностью 1/2Fбi, поступают видеоимпульсы сигнала биений с частотами Fбi, выделенные УПФ и подсчитываемые СЧ1, формирующим, периодически, числа Nсч и обнуляемый импульсом с выхода ДШ2. Очевидно, что только при сформированном цифровом числе Nсч сопоставимым с числом Nуст, на выходе ЦК будет сформирован потенциал пропускаемый на регистр сдвига (РГ), через элемент И2, в течении паузы между импульсами в последовательности, формируемой элементом НЕ. При этом на предпоследнем выходе РГ импульс – метка времени появится только после нескольких раз обнаружения объекта, что повышает надежность и точность его обнаружения. После чего импульсом метки времени запускается реле времени (РВ1) с временем выдержки, например, tз и далее РВ2, формирующее интервал времени для работы устройства – нагрузки ФМВ. При этом структурная схема ФМВ может быть изображена в виде прямоугольника, внутри которого отображены аббревиатуры: ФМВ – название устройства, Х – название входной шины и Y – название выходной шины.
1.2.1.1.2 ДИСКРЕТНО ПЕРЕСТРАЕВЫЕМЫЕ ПЕРЕДАТЧИКИ
ЧАСТОТНЫХ РАДИОЛОКАТОРОВ
Составной частью любой РЛС является передатчик радиосигнала, включающий, как правило, задающий генератор малой мощности и усилитель мощности сигнала задающего генератора, выполняемые, в зависимости от метода, последовательного или параллельного, обнаружения сигнала с перестраиваемыми, или нет, параметрами радиосигнала (с изменяемой по величине скоростью изменения частоты f НЛЧМ сигнала).
1.2.1.1.2.1. ПЕРЕДАТЧИК С ДИСКРЕТНО ПЕРЕСТРАИВАЕМОЙ
ЧАСТОТОЙ МОДУЛЯЦИИ
Блок – схема передатчика с дискретно перестраиваемой частотой Fм модуляции приведена на рис. 1.11. Передатчик работает следующим образом.
При подаче на СЧ1 импульса, на его выходах устанавливается цифровой код, согласно которому на выходе электронного коммутатора (ЭК) устанавливается соответствующий уровень постоянного напряжения, сформированный в блоке эталонных напряжений (БЭН), согласно которому на выходе ГУН1 формируется непрерывный сигнал с соответствующей частотой fгун1, который далее преобразуется,
ПР, в последовательность видеоимпульсов, подсчитываемых СЧ2, формирующим на своем выходе цифровой код меняющийся, за разное время, определяемое fгун1, от установленных минимума до максимума. Цифровой код, согласно которому на выходе цифроаналогового преобразователя (ЦАП) формируется периодически
Рис. 1.11.
повторяющееся и ограниченное по времени и амплитуде линейно возрастающее напряжение. Повторяющееся с частотой Fм, являющейся функцией цифрового кода на выходах СЧ1 и очередности поступающих на его вход Х импульсов. И после подачи данного напряжения на вход управления ГУН2, на его выходе формируется ЛЧМ сигнал с неизменной fд девиацией и, при необходимости, изменяемой частотой Fм модуляции, который поступает на выход Y1 и усиленным усилителем мощности (УМ), на выход Y2. При этом структурная схема ПД может быть изображена в виде прямоугольника, внутри которого отображены аббревиатуры: ПД – название устройства, Х – название входной шины и: Y1, Y2 – название выходных шин.
1.2.1.1.2.2. ПЕРЕДАТЧИК С ДИСКРЕТНО ПЕРЕСТРАИВАЕМОЙ
ДЕВИАЦИЕЙ ЧАСТОТЫ
Блок – схема передатчика с дискретно перестраиваемой девиацией fд частоты приведена на рис. 1.12. Передатчик работает следующим образом.
Рис. 1.12
Частота сформированного на выходе ГУН ЛЧМ сигнала, последовательно, удваивается в смесителях (СМ) ячеек и сигналы с удвоенными частотами выделяются фильтрами суммарной частоты (ФСЧ) ячеек. Т. е. на выходах ФСЧ формируются ЛЧМ сигналы с постоянной частотой Fм модуляции и изменяемыми f и fд, которые, через управляемый цифровым кодом с выхода СЧ коммутатор ЭК, поступают на выходную шину Y1 и усиленными УМ на выходную шину Y2. При этом структурная схема ПД может быть изображена в виде прямоугольника, внутри которого отображены аббревиатуры: ПД – название устройства, Х – название входной шины и: Y1, Y2 – название выходных шин.
1.2.1.1.2.3. ПЕРЕДАТЧИК С ДИСКРЕТНО ПЕРЕСТРАИВАЕМЫМИ
ДЕВИАЦИЕЙ ЧАСТОТЫ И ЧАСТОТОЙ МОДУЛЯЦИИ
Блок – схема передатчика с дискретно перестраиваемыми девиацией fд и частотой Fм модуляции приведена на рис. 1.13 и представляет собой объединенный вариант
Рис. 1.13.
двух предыдущих передатчиков (ПД), при котором, сформированный одним ПД, с необходимой частотой Fм модуляции ЛЧМ сигнал, подают на другой ПД, которым изменяют его девиацию fд. Т. е. изменение скорости g частоты ЛЧМ сигнала осуществляют посредством одновременного дискретного изменения и девиации fд и частоты модуляции Fм. При этом структурная схема ПД может быть изображена в виде прямоугольника, внутри которого отображены аббревиатуры: ПД – название устройства, Х – название входной шины и: Y1, Y2, Y5, – название выходных шин.
1.2.1.1.2.4. ДВУХЧАСТОТНЫЙ ПЕРЕДАТЧИК С ОДНОВРЕМЕННО
ВОЗРАСТАЮЩЕЙ И УБЫВАЮЩЕЙ ЧАСТОТАМИ СИГНАЛОВ
Известно [2], при модуляции зондируемого ЧМ сигнала по закону симметричной треугольной кривой можно раздельно мерить расстояния до цели и скорость ее движения. Раздельно, но не одновременно. Очевидно, что если мерить расстояния до цели и скорость ее движения одновременно, то можно сократить время, затрачиваемое на измерения параметров цели. Последнее становится осуществимым если, например, сформированные вышерассмотренными передатчиками НЛЧМ сигналы с изменяемой частотой fГУН подавать на смеситель (СМ), на второй вход которого подавать сигнал с генератора (ГНЧ) несущей частоты f (рис. 1.14).
Рис. 1.14.
А с выхода СМ полосовым фильтром (ПФ) выделять, одновременно, и суммарный сигнал: f+fГУН, и разностный сигнал: f-fГУН, у одного из которых несущая частота будет возрастать, а у другого убывать, то это позволит одновременно излучать в пространство два НЛЧМ сигнала модулированные: один по закону возрастающей ограниченной прямой, а другой по закону убывающей ограниченной прямой.
1.2.1.1.3. ИЗМЕРИТЕЛИ ЧАСТОТНЫХ РАДИОЛОКАТОРОВ
Неотъемлемой частью любого радиолокатора являются измерители сигналов, в том числе у ЧРЛС это, по крайней мере, частотомеры (ЧАСТ). Наиболее просто измерить частоту гармонического сигнала (биения) можно, если сосчитать количество импульсов эталонной частоты за период следования сигнала. При этом, очевидно, необходимо преобразовать гармонические сигналы в меандры из, например, положительных импульсов длительностью в половину периода биения, следующих с частотой следования равной частоте гармонического сигнала.
1.2.1.1.3.1.ИЗМЕРИТЕЛЬ ОДИНОЧНОГО ВИДЕОИМПУЛЬСА В МЕАНДРЕ
Измерить длительность импульса в последовательности или пачке импульсов, можно только после выделения данного импульса, например, с помощью измерителя одиночных импульсов (ИОИ), блок-схема которого приведенной на рис. 1.15, работающий следующим образом.
Через входную шину <FА> на ПР поступает гармонический сигнал частотой FА, преобразуемый ПР в меандр с импульсами длительностью ТА=1/2FА, которые, после подачи на элемент И строб – импульса (СИ) с шины <FО>, проходят через него на регистр сдвига (РГ), полноценным и длительностью ТА, либо частью ТА из-за несинхронности видеоимпульсов и СИ, сразу после подачи СИ, переключая РГ в состояние с положительным потенциалом, сначала на первом его выходе, затем на втором и далее на третьем. Это позволяет после второго импульса, поданного на РГ, сформировать передний фронт одиночного импульса длительностью ТА, а после третьего – его задний фронт и, через элемент НЕ, запретить дальнейшее
Рис. 1.15.
формирование импульсов длительностью ТА. После чего, импульсом с выхода РГ открывается второй элемент И2, для прохождения через него на СЧ счетных импульсов с генератора ГСЧ, в течении времени ТА и отображения показаний счетчика на индикаторе отградуированном в единицах времени.
1.2.1.1.3.2. ИЗМЕРИТЕЛЬ ПОВТОРЯЮЩИХСЯ ИНТЕРВАЛОВ ВРЕМЕНИ
Измеритель частоты повторения импульсов в меандре (ИЧПИ) в принципе – частотомер, в котором может отсутствовать преобразователь гармонического сигнала с частотой FА в, например, положительные видеоимпульсы, следующие с той же частотой FА повторения. Очевидно, что частоту повторения таких видеоимпульсов можно определить по величине длительности измеренного одиночного импульса, сформированного способом, отмеченным в предыдущем разделе и равного пол периода частоты повторения импульсов в меандре. Однако, для повышения надежности результата измерения, целесообразно вход элемента НЕ подключить не к третьему выход РГ, а к его N выходу и подсчитать количество счетных импульсов за время измерения (N-1)ТА. И после деления количества подсчитанных счетных импульсов на число (N-1), усредненное значение отобразить на индикаторе ЧАСТ.
Как видно, составной частью частотомеров являются измерители повторяющихся интервалов времени (ИПИ). При этом определение истинного значения интервала времени с вероятностью Рi>0,9 считается удовлетворительным, а повышение вероятности Рi – желаемой целью при конструировании измерителей временных интервалов и частотомеров.
Известен измеритель временных интервалов, содержащий первый и второй формирователи, входы которых подключены к шинам соответственно старт и стоп – импульса, временной селектор, первый и второй входы которого соединены с выходами соответственно первого и второго формирователей, третий вход временного селектора подключен к выходу генератора счетных импульсов, а выход временного селектора соединен со входом счетчика [10, с. 140-141].
Недостаток измерителя – малая вероятность определения истинного значения временного интервала, которую можно повысить измерителем повторяющихся интервалов времени, блок схема которого приведена на рис.1.16, который работает следующим образом.
По приходу старт-импульса формирователь 1 формирует импульс, открывающий временной селектор 3, и счетные импульсы с генератора 4 через временной селектор 3 и открытый высоким потенциалом с первого выхода счетчика 6 элемент И10 поступают на суммирующий вход счетчика 7.
Пришедший затем стоп-импульс формирует на выходе формирователя 2 сигнал, закрывающий временной селектор и переводящий счетчик 6 в положение, при котором теперь на его втором выходе существует высокий потенциал, открывающий элемент И11, а элемент И10 – закрывается. В счетчике 7 оказывается записанным код, соответствующий первому измеренному интервалу между первым старт – и стоп – импульсами с некоторой вероятностью Р1.
По приходу второго старт-импульса цикл повторяется только теперь счетные импульсы проходят через открытый элемент И11 на счетчик 8, где к приходу второго стоп-импульса записан код временного интервала с вероятностью Р2.
Код временного интервала между третьим старт – и стоп – импульсами с вероятностью Р1 записан в счетчик 9, и третий стоп-импульс сосчитанный счетчиком 6, открывает элемент И13. Счетные импульсы через элемент И13 начинают поступать на вычитающие входы счетчиков 7–9 и на счетный вход счетчика 5. Содержимое счетчиков 7-9 уменьшается и синхронно увеличивается содержимое счетчика 5.
Когда содержимое любых двух из трех счетчиков 7-9 достигает нуля, на выходах нуля этих двух счетчиков возникает высокий потенциал, срабатывает соответствующий один из трех элементов И 14-16, низкий потенциал с элемента ИЛИ-НЕ 17 перекрывает элемент И13 и счет прекращается – в счетчике 5 сформирован код измеряемого временного интервала, соответствующий его истинному значению с вероятностью Р.
Рис.1.16.
Вероятность такого события определяется так.
Положим Р1=Р2=Р3=Р
Отсюда, вероятность того, что в одном из счетчиков записан результат больше или меньше истинного, равен
(1-Р)/2.
Тогда: вероятность события, что во все три счетчика 7-9 записывается количество импульсов, соответствующих истинному значению измеряемых интервалов, равна
Р1=Р1Р2Р3=Р3;
вероятность события, что, например, в два из трех счетчиков 7-9 записывается количество импульсов, соответствующих истинному значению длительности измеряемых интервалов, а в один из счетчиков 7-9 – количество импульсов, соответствующих длительности ложного интервала времени, равна
Р11=Р2[(1-Р)/2];
вероятность события, что в один счетчик 7 записывается информация об истинном интервале времени, в другой счетчик 8 – информация о ложном интервале времени, большем истинного, а в третий счетчик импульсов 9 – информация о ложном интервале времени, меньше истинного, равна
Р111=Р[(1-Р)/2]2.
Полная вероятность события Рп определяется
Рп=Р1+6Р11+6Р111=Р3+6Р2[(1-Р)/2]+6Р[(1-Р)/2]2.
Так, например, при вероятности однократного измерения Р=0,9, вероятность измерения рассмотренным измерителем составит Р=0,9855.
Т. е. данный измеритель, по сравнению с известным, позволяет повысить вероятность определения повторяющегося временного интервала с допустимой точностью измерения [9].
1.2.1.1.3.3. ИЗМЕРИТЕЛЬ ПЕРИОДА СЛЕДОВАНИЯ
ВИДЕОИМПУЛЬСОВ В МЕАНДРЕ
Формирование меандра и импульсов в нём наиболее просто можно осуществить, если гармонический сигнал, лучше усиленный и симметрично ограниченный, подать на вход аналогового компаратора с заземленным входом опорного напряжения.
Рис. 1.17.
Однако даже такой способ формирования меандра не гарантирует того, что импульсы в меандре по длительности будут точно соответствовать половине периода следования гармонического сигнала, в том числе, из-за: нестабильности опорного напряжения, несимметричности усиленного и ограниченного гармонического сигнала, климатических и других воздействий на элементы схемы и т. п.
Для того чтобы всё - таки более точно измерить частоту гармонического сигнала, можно воспользоваться частотомером, блок схема которого приведена на рис. 1.17, который, в принципе, представляет собой два измерителя одиночных импульсов в меандре, один из которых измеряет положительные импульсы в меандре, а другой <отрицательные>, формируемые на выходе элемента НЕ – нагрузки преобразователя (ПР) и заменяющего собой преобразователь второго канала измерения. Очевидно, что после суммирования сумматором двух результатов измерения на его выходе будет получен наиболее достоверный результат истинного периода частоты Fо измеряемого гармонического сигнала, достоверность которого можно будет в очередной раз повысить способом, рассмотренным в предыдущем разделе.
1.2.1.1.4. ПРИЁМНИКИ ЧАСТОТНЫХ РАДИОЛОКАТОРОВ
Приёмники частотных радиолокаторов можно разделить на приемники параллельного и последовательного анализа информации (многоканальные и одноканальные). Так, например, в американской РЛС обнаружения AN/FPS-50 [15] применен анализатор частот Доплера, который представляет собой набор узкополосных фильтров, частотные характеристики которых частично перекрываются. Фильтры анализатора обеспечивают перекрытие всего диапазона возможных доплеровских частот. Максимальное значение амплитуды сигнала получается на выходе того фильтра, резонансная частота которого совпадает с частотой сигнала. Все фильтры нумеруются, и номер фильтра, на выходе которого формируется сигнал максимальной величины, несет информацию о радиальной скорости цели. Очевидно, что аналогичным способом и при небольших скоростях перемещения цели, можно определять и текущую дальность до цели.
Измерить скорость цели также можно, если использовать приёмник с перестраиваемым фильтром, которую принудить в каждый момент времени обеспечивать выделение только одной частоты доплеровского сигнала, получаемого, после преобразования излученного и отраженного от цели непрерывных не модулируемых СВЧ сигналов. Скорость перестройки таких фильтров рекомендуют выбирать такой, чтобы время воздействия сигнала на фильтр было в 2 - 3 раза больше, чем величина, обратная его полосе пропускания. Разрешающая способность такой РЛС, а значит и точность измерения скорости цели при данном способе ее измерения будут зависеть и определяться полосой пропускания перестраиваемого фильтра.
Известно, что непрерывная перестройка фильтра приводит к потере части энергии отраженного сигнала, что уменьшает дальность действия РЛС.
К недостаткам отмеченного способа измерения скорости цели можно отнести и жесткое требование к долговременной стабильности параметров перестраиваемого фильтра. Эта нестабильность, для достижения минимально возможной погрешности измерения скорости, определяется несколькими порядками, что приводит к значительным трудностям в осуществлении данной идеи.
Очевидно, что часть из отмеченных выше недостатков, а также трудности, связанные с обнаружением нужного сигнала доплеровской частоты, усугубляются пропорционально увеличению диапазона исследуемых частот Доплера.
Кроме сказанного можно отметить, что пассивный фильтр, перестраиваемый в широком диапазоне частот, создать трудно, поэтому чаще всего применяются фильтры с перестраиваемым гетеродином. Такой фильтр включает в себя смеситель, перестраиваемый гетеродин и не перестраиваемый фильтр.
Как известно, преимуществом последовательного анализа является относительная простота (необходим только один фильтр), недостатком - большое время анализа.
При комбинированном анализе весь диапазон доплеровских частот разбивается на поддиапазоны. В каждом поддиапазоне используются свои гетеродины и фильтры, что сокращает время поиска, но не решает проблемы в целом.
Традиционный частотный радиолокатор принимает все отражения от неподвижных предметов (<местников>) окружающих излучатель электромагнитной энергии, что формирует мощную пассивную помеху на входе приемника радиолокатора, и приводит к уменьшению отношения сигнал/помеха (С/П) и, порой, к невозможности различения цели на фоне помех из-за плохой чувствительности приёмника, пропорциональной отношению С/П. Особенно данная ситуация усугубляется <местниками> расположенными вблизи излучателя (например, бортом танка, на котором установлен радиолокатор). Для снижения мощности помех обычно используют подавляющие помеху фильтры (в частности режекторные фильтры) с узкими полосами подавления того или иного спектра частот помех. А вот тот факт, что не вся собираемая на РЛС информация из пространства вокруг излучателя является полезной и частью из нее, попросту, можно пренебречь, не всегда рассматривается, а это может существенно упростить существующую проблему. Так, например, это можно осуществить при нетрадиционном частотном методе радиолокации, посредством покрытия радиопоглощающим материалом (РПМ) только участков соприкосновения <чувственных зон> с поверхностью, создающей сигналы помехи, что позволяет также решать и проблему радиолокационной маскировки объектов на принципиально ином уровне. В этом случае электромагнитная энергия поглощается и превращается в тепловую, которая недостаточна для тепловизионного обнаружения даже с близких расстояний. Эффективность радиолокационной маскировки с помощью РПМ зависит от степени закрытия ими отражающих поверхностей и от их поглощающей способности. Считается, что при закрытии РПМ менее половины площади поверхностей, их применение не дает существенного эффекта. С увеличением же степени закрытия отражающей радиосигналы поверхности, что, как видно, возможно при нетрадиционном частотном методе радиолокации, эффективность маскировки возрастает, так же как и повышается отношение С/П и, соответственно, чувствительность приёмника. То есть цель обнаруживается при её нахождении в <чувственной зоне> шириной не более Ш=tзVr и этого достаточно. А остальная информация, в том числе отражения от неподвижных предметов вокруг излучателя, будет избыточной и удалена узкополосным фильтром (УПФ), формирующим <<чувственную зону>>.
Следует отметить, что при проведении процесса обнаружения цели при традиционном методе радиолокации, например, при последовательном методе её обнаружения, используют полосовые фильтры с центральной частотой определяемой средней дальностью до цели [(Дмакс+Дмин)]/2, на которой предполагается проводить её обнаружение и полосой пропускания спектра частот, определяемым разностью расстояний – Sр = (Дмакс – Дмин) и диапазоном спектра допплеровских частот, определяемым предполагаемым диапазоном радиальных скоростей целей. То есть, в данном случае, в приемниках РЛС используют полосовые фильтры с очень широкими полосами пропускания, что существенно сказывается на чувствительности каналов обнаружения РЛС, которую желательно иметь высокой. Очевидно, что при нетрадиционном методе радиолокации, можно использовать УПФ с полосой пропускания не зависящей от ширины спектра частот Доплера, так как цель обнаруживается посредством обнаружения сигнала биений известной конкретной величины, определяемой выражением Fб=g2Д/С, что в свою очередь позволяет повысить чувствительность тракта обнаружения приемника Избавиться от избыточной информации, связанной с отражениями от земной поверхности, или от ее части, например, с помощью селекции движущихся целей (СДЦ), не просто, а порой невозможно (например, при малых временах отводимых на обнаружение целей, в частности, при осуществлении активной защиты танков).
1.2.1.1.5. ОПРЕДЕЛИТЕЛЬ ДИАПАЗОНА СКОРОСТЕЙ ЦЕЛЕЙ
Определять диапазон перемещения скоростей целей необходимо, по крайней мере, для того, чтобы оценить, какую из себя опасность цель может представлять. И это можно сделать с помощью устройства, блок - схема которого приведена на рис.1.18, содержащая: измеритель одиночного импульса (ИОИ) типа, описанного в статье выше, позволяющий измерить частоты Fс сигнала, соответствующие скорости цели; два цифровых компаратора (ЦК) для сравнения величины Fс с двумя известными величинами, F1 и F2; элемент И для констатации того факта, что если F2< Fс< F1, то цель движется со скоростью относящейся к диапазону средних скоростей перемещения (высокий потенциал на выходной шине YVС), а при Fс>F1 или Fс<F2, на выходах, соответственно, первого и второго ЦК (выходные шины YVБ и YVМ), формируются высокие потенциалы
Рис. 1.18
свидетельствующие, соответственно, о больших и малых скоростях перемещения целей.
1.2.1.1.6. ЭЛЕКТРОННЫЙ ФАЗОМЕТР
Электронные фазометры являются составной частью измерительных приборов, предназначенных для работы, по крайней мере, с одинаковыми радиосигналами (гармоническими сигналами, одиночными видеоимпульсами, меандрами и т. п.) задержанными относительно друг друга по времени (например, по фазе)
Известны [7 (стр. 494-495) из ст.№5]: фазовый детектор с запоминанием знака и срабатывающий по фронту фазовый детектор с запоминанием знака, которые при любом сдвиге фаз формируют сигнал с правильным знаком и которые состоят в основном из двух RS-триггеров. Фазовые детекторы обрабатывают два коротких импульса, образующихся из входных напряжений, например, двух, одинаковых по частоте, гармонических сигналов, сдвинутых по фазе, при переходе каждой синусоиды гармонического сигнала через ноль. Очевидно, что фазовые детектора, совместно с формирователями импульсов, представляют собой электронные фазометры, имеющие недостаток - формируемые ими сигналы, которые должны соответствовать истинным сдвигам фаз между входными гармоническими сигналами, зависят от ухода нулевых линий формирователей импульсов (усилителей – ограничителей, аналоговых компараторов и т. п.).
От данного недостатка свободен электронный фазометр [11 из ст.№5], блок – схема которого приведена на рис.1.19, в котором повышение точности формирования сдвигов фаз достигается за счет сложения или вычитания амплитуд импульсов, соответствующих по длительности сдвигу фаз между исследуемыми сигналами, подаваемыми на один из входов вычитателя, и сигналом, подводимым к второму входу вычитателя, т. е. за счет двухполупериодного формирования фазовых интервалов.
Рис. 1.19
Рис.1.20
.Электронный фазометр работает следующим образом.
Исследуемые напряжения (рис.1.20 а, б) преобразуются усилителями-ограничителями к и 5 (компараторами, например, 521СА4) в прямоугольные (рис..1.20 в, г) и инверсные прямоугольные (рис.1.20 д, е) импульсы, которые поступают на фазовые детекторы 6 и 7 с запоминанием знака, выполняющие функцию преобразования сдвига фаз между прямоугольными импульсами в длительность импульсов, а также распределения импульсов, соответствующих сдвигам фаз, по каналам (рис.1.20 ж, з, и, к). Элементы ИЛИ 8 и 9 выполняют функцию логического сложения соответственно импульсов, поступающих с первых выходов фазовых детекторов 6 и 7 (рис.1.20 ж, и), и импульсов, поступающих с вторых выходов фазовых детекторов 6 и 7 (рис.1.20 з, к). Импульсы (рис.1.20 л), сформированные на выходах элементов ИЛИ 8 и 9, несущие информацию о сдвиге фаз между исследуемыми напряжениями, поступают на вычитатель 10 и далее на фильтр 11 нижних частот, выделяющий постоянную составляющую (рис.1.20 м) последовательности импульсов. величина которой не зависит от ухода нулевой линии в усилителях – ограничителях.
1.2.1.1.7 ОПРЕДЕЛИТЕЛИ НАПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯ ЦЕЛИ
Часто, для того чтобы принять то или иное решение, например, решение по началу определения координат цели, появившейся в обозримом пространстве, необходимо знать, приближается или удаляется цель от излучателя НЛЧМ сигнала. Очевидно, что при удалении цели, она, с высокой вероятностью, будет про игнорирована, а при приближении, наоборот.
Определить направление перемещения цели, т. е. сближаются, или удаляются объекты друг от друга, можно с помощью определителя направление перемещения цели (ОНПЦ), установленных на объектах. Блок - схема такого ОНПЦ приведена на рис.1.21. ОНПЦ содержит:
- один из формирователей метки времени (ФМВ1) приведённых выше и подключенный к выходу узкополосного полосового фильтра (УПФ) частотной РЛС, например, реализованной по схеме рис.1.4, приведённой выше, образующих нетрадиционный частотный радиолокатор (НЧР) одного из без вычислительных КАЗ, рассмотренных в моих статьях №13 или №14;
- второй ФМВ2, подключенный параллельно первому;
- фазовый детектор с запоминанием знака - ФДЗ [7(стр. 493-495) из ст.№5] с выходами, подключенными к
Рис.1.21.
выходным шинам YНО и YНК, высокие потенциалы на которых определяют: сближаются, или удаляются объекты друг от друг, и входами ФДЗ подключенными к выходам, соответственно, первого и второго ФМВ, импульсы на выходах которых определяют моменты возникновения и обнаружения сигналов биений, при нахождении цели в районе той или иной сформированной <<чувственной зоны>> (поверхности сферы удалённой от излучателя НЛЧМ сигнала на заданном удалении Дту плюс (+) расстояние tзVri, гдеVri-радиальная скорость приближающейся к излучателю цели, или на заданном удалении Дту минус (-) расстояние tзVri, гдеVri-радиальная скорость удаляющейся от излучателя). При этом, например, если первым был сформирован импульс на выходе ФМВ1, когда цель была на более дальнем рубеже от излучателя ЛЧМ сигнала, а затем на выходе ФМВ2, когда цель была на более ближнем рубеже, то высокий потенциал будет сформирован, например, на выходной шине Yно фазового детектора, что будет означать, что цель приближается к объекту, и наоборот.
Определить направление перемещения цели можно также с помощью ОНПЦ с одним ФМВ, блок-схема которого приведена на рис.1.22, и который может быть выполнен в чисто аналоговом исполнении. Рассмотрим работу такого ОНПЦ.
ОНПЦ содержит:
- ФМВ, подключенный к РЛС, образующих частотный радиолокатор;
- электронный ключ (ЭК), пропускающий сигналы биений на частотный дискриминатор (ЧД) после формирования ФМВ метки времени, при пересечении целью <<чувственной зоны>> на соответствующем удалении от излучателя;
- аналоговый компаратор (АК) с входом опорного напряжения подключенным к шине Х, на которой устанавливают постоянный уровень напряжения, который мог бы был получен на выходе ЧД при подаче на его вход биения с частотой Fб=2Rg/C;
- элемент НЕ, инвертирующий потенциал сформированный на выходе АК;
- выходные шины Yно и Yнк, высокий потенциал на выходах которых отображает направление перемещения цели.
Рис.1.22.
При этом, если после сформированной метки времени на входе ЧД будет формироваться сигнал биений, частота которого будет возрастать, из-за удаления цели от излучателя, то высокий потенциал будет сформирован, например, на выходной шине Yнк, что будет свидетельствовать о том, что цель удаляется. И наоборот, при приближении цели к излучателю, частота сигнала биений на входе ЧД будет уменьшаться, при том же изменении частоты f зондируемого ЛЧМ сигнала по закону ограниченной возрастающей прямой, и высокий потенциал будет сформирован на выходе элемента НЕ – выходной шине Yно.
10.1.6. ОПРЕДЕЛИТЕЛЬ НАПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯ ЦЕЛИ
ОТНОСИТЕЛЬНО ИСТОЧНИКА ИЗЛУЧЕНИЯ НЛЧМ СИГНАЛА
Для того чтобы принять решение, например, стоит ли обращать внимание на внезапно возникшую цель, необходимо, по крайней мере, определить, к нам, или от нас, цель перемещается, например, определителем направления перемещения цели относительно источника излучения НЛЧМ сигнала (ОНПЦОИ), блок-схема которого может быть такой как на рис.1.23.
Рис.1.23
ОНПЦОИ работает следующим образом. Сформированные на выходе СВЧ смесителя (ССМ) традиционного частотного радиолокатора (ТЧР), рассмотренного в моей ст.№6, сигналы биения (сформированные биения после смешивания в ССМ отраженного от цели сигнала с излучённым антенной <О> НЛЧМ сигналом, сформированным передатчиком – ПД) поступают на два узкополосных фильтра (УПФ1 и УПФ2) с одинаковыми полосами пропускания и разными их центральными частотами (fц1 и fц2). При этом УПФ1 выделяет биения, например, формируемые на дальних подступах к излучателю НЛЧМ сигнала, а УПФ2 на ближних, которые далее своими усилителями-ограничителями (Уогр) усиливаются до уровней срабатывания логических элементов НЕ и И и интегрируются (накапливаются в конденсаторах интеграторов) интеграторами (Интегр).
Таким образом, если цель приближается к излучателю НЛЧМ сигнала, то сигнал биения будет сформирован сначала на выходе УПФ1 и только затем на выходе УПФ2, что приведёт к тому, что информация (в виде, например, логической 1) появится только на выходе элемента И1. При удалении же цели от излучателя НЛЧМ сигнала логическая 1 будет сформирована только на выходе элемента И2.
Блок-схема варианта определителя направления перемещения цели относительно источника излучения НЛЧМ сигнала (ОНПЦОИ) с одним формирователем метки времени (ФМВ) приведена на рис.1.24. ОНПЦОИ. Данный ОНПЦОИ является цифровым аналогом аналогового определителя, рассмотренного в моей ст.№7 (рис.1.22) и работает следующим образом
Рис.1.24
ОНПЦОИ, рис.10.4, представляет сбой нетрадиционный частотный радиолокатор (НЧР) рассмотренный, например, в моей ст.№10, формирующий метку времени в момент нахождения приближающейся к излучателю НЛЧМ сигнала цели на заданном удалении Дзад плюс (+) tзVr (то есть Дзад+tзVr, где Vr – радиальная скорость цели, а tз=f/Fмfд=f/g - известное время, определяемое заданными параметрами НЛЧМ сигнала), когда между излучателем и целью будет расстояние Дзад+tзVr и на радиолокаторе будет формироваться сигнал биения с частотой
Fфмв=[2(Дзад+tзVr)g/c]-(Fд=2fVr/c)=g2Дзад/с,
а через время tз сигнал биения с частотой
Fприбл=[2(Дзад+tзVr)g/c],
где Fд- частота Доплера.
При удалении же цели от излучателя НЛЧМ сигнала метка времени на выходе ФМВ будет формироваться в момент, когда между излучателем и целью будет расстояние Дзад-tзVr и на радиолокаторе будет формироваться сигнал биения с частотой
Fфмв=[2(Дзад-tзVr)g/c]+(Fд=2fVr/c)=g2Дзад/с,
а через время tз сигнал биения с частотой
Fудал=[2(Дзад-tзVr)g/c]
При этом значения частот сигналов биений Fприбл и Fудал, через время tз после обнаружения на НЧР сигнала биения с частотой Fфмв (после обнаружения цели) и после их измерения частотомером (ЧАСТ), будут сравниваться, на цифровом компараторе (ЦК), с известным значением частоты Fфмв. И если, например, логическая 1 появится сначала на первом выходе ЦК, а затем на втором, то будет зафиксирован факт удаления цели от излучателя НЛЧМ сигнала. И на оборот, когда будет зафиксирован факт приближения цели к излучателю НЛЧМ сигнала.