В статье рассмотрена модификация математической модели парашютной посадки беспилотного летательного аппарата (БЛА) самолётной схемы, реализованной в программной среде REPEAT с использованием блока решения обыкновенных дифференциальных уравнений. Представлены особенности обновлённой модели и методы её верификации для повышения точности расчёта динамики снижения БЛА.

Описание модели
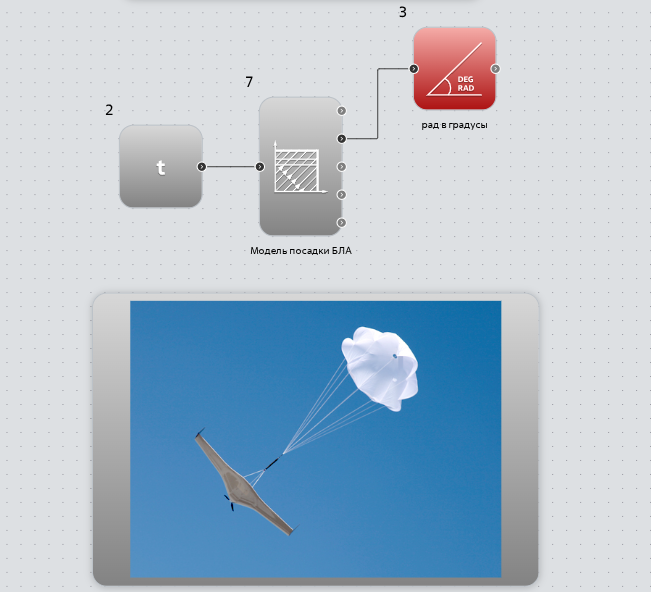
Модель парашютной посадки беспилотного летательного аппарата самолётной схемы реализована в программной среде REPEAT с использованием блока решения обыкновенных дифференциальных уравнений (ОДУ). Модель описывает динамику снижения БЛА под парашютом, учитывая аэродинамические силы парашютной системы, гравитацию и внешние возмущения. В неё введены уточнённые коэффициенты сопротивления, площадь купола и параметры нагрузки, обеспечивающие точное моделирование траектории. Начальные условия задаются в момент отделения парашюта, включая скорость, высоту и ориентацию аппарата.
Модификация модели посадки – столкновение БЛА с землей
Для демонстрации способности блока ОДУ решать жесткие задачи и добавления визуальной реалистичности, модель может быть дополнена четвертым этапом - упругим столкновением БЛА с земной поверхностью. Данная модификация реализует классическую задачу отскока мяча с энергетическими потерями.
Столкновение моделируется как пружинно-демпферная система:
- Жесткость пружины (stiffness = 1e4 [Н/м]) - определяет упругость отскока;
- Демпфирование (damping = 50 [Н·с/м]) - обеспечивает постепенную потерю энергии.
Уравнение движения при контакте с землей:
где:
k - коэффициент жесткости;
c - коэффициент демпфирования;
y - глубина проникновения в землю (координата y).
Так как момент столкновения (координата y<0) – это резкое, прерывистое событие, продолжение расчета с прежними производными может привести к нестабильному расчету решателя ОДУ, поэтому необходимо добавить событие, которое при изменении знака координаты y производило сброс производных.
Помимо нового события, был модифицирован код для обработки столкновения, изменения коснулись разделов Основной блок и После интегрирования в Дополнительных блоках:
Результаты моделирования модифицированной модели
Графики высоты и скорости БЛА в до и после столкновения с землей имеют вид:
Результаты расчета модифицированной модели демонстрируют, что блок ОДУ может работать не только непрерывными процессами, но и с жёсткими системами, где параметры дифференциальных уравнений меняются скачкообразно.
Выводы
В рамках данной статьи была успешно модифицирована и верифицирована математическая модель парашютной посадки беспилотного летательного аппарата самолётной схемы в ПО REPEAT с использованием блока ОДУ.
1. Достигнутые результаты и верификация модели
Проведенное исследование демонстрирует высокую эффективность и точность применения блока ОДУ для решения сложных динамических задач. Результаты расчёта с высокой точностью соответствуют данным, приведённым в монографиях (В.С. Моисеев [1], [2]), служат убедительным доказательством корректности модели.
2. Функциональность и надежность блока ОДУ
В ходе работы была подтверждена способность блока ОДУ ПО REPEAT устойчиво решать системы ОДУ с прерывистой динамикой.
3. Практическая значимость и область применения
Разработанная модель представляет собой готовый инструмент для проектных расчётов, позволяющий с высокой достоверностью определять траекторию и точку приземления БЛА.
Список литературы
1. Моисеев В.С. Динамика полета и управление беспилотными летательными аппаратами: монография. – Казань: Редакционно-издательский центр «Школа», 2017. 416 с.
2. Моисеев В.С. Прикладная теория управления беспилотными летательными аппаратами: монография. Казань: Республиканский центр мониторинга качества образования (РЦ МКО), 2013. 768 с.
3. Разработка математической модели парашютной посадки беспилотного летательного аппарата - URL: https://app.repeatlab.ru/docs/ru/howto/aircraft/development_of_mathematical_model_for_UAV_parachute_landing/index.html#id2