
Введение
Представьте, что у вас есть личный водитель-робот, который никогда не устает, не отвлекается на телефоне и идеально соблюдает все правила дорожного движения. Это уже не фантастика, а реальность, которая постепенно входит в нашу жизнь. Тема беспилотного транспорта на основе искусственного интеллекта (ИИ) сегодня актуальна по нескольким очень важным причинам.
Каждый день в авариях гибнут люди. Чаще всего это происходит из-за человеческих ошибок: кто-то переутомился, отвлекся, превысил скорость. Беспилотники же не могут "заснуть" за рулем или поссориться с другим водителем. Они всегда внимательны.
Все мы стоим в пробках и тратим время впустую. Беспилотные машины могут "договариваться" друг с другом, чтобы ехать более организованно. А значит мы будем гораздо быстрее добираться до работы и домой.
Пожилые люди, люди с ограниченными возможностями, подростки - многие не могут сесть за руль. Беспилотный транспорт даст им свободу передвижения без помощи других.
Актуальность данной темы заключается в ее потенциале изменить нашу повседневную жизнь: сделать дороги безопаснее, разгрузить мегаполисы, снизить вредные выбросы, предоставить новые возможности для мобильности миллионам людей.
В данной статье мы рассмотрим:
- Ключевые понятия темы;
- Принципы автономного управления;
- Алгоритмы восприятия среды и принятия решений;
- Плюсы и минусы технологии.
Основы беспилотного транспорта
Чтобы перейти к принципам автономного управления и алгоритмам восприятия среды, предварительно нужно прийти к пониманию: а что же такое искусственный интеллект, беспилотный транспортных комплекс и машинное обучение! Ниже будут представлены определения из Wikipedia и впоследствии объяснены простыми словами.
- Беспилотный транспортный комплекс (БТК) - это вид транспорта, основанный на автономной системе управления. Управление таким средством автоматизировано и осуществляется без водителя при помощи оптических датчиков, радиолокации и компьютерных алгоритмов;
- Искусственный интеллект (ИИ) - это направление науки, которое занимается разработкой компьютерных систем, способных выполнять задачи, свойственные человеческому интеллекту. В состав таких задач входит: анализ данных, распознавание образов, обработка текстов и запросов, сформулированных естественным языком, обучение на потоках данных и принятие решений;
- Машинное обучение (МО) - это класс методов искусственного интеллекта, характерной чертой которых является не прямое решение задач, а обучение за счет применения решений за счет решений множества исходных задач.
На первый взгляд, может показаться то, что определения достаточно трудны в понимании из-за большого количества, казалось-бы непонятных, научных слов и словосочетаний. Однако стоит лишь разложить определение на отдельные составляющие, выделить главные слова, оно становится более понятным.
Простыми словами:
- Беспилотный транспортный комплекс (БТК) - это не просто машина без руля. Это транспортное средство, которое состоит из двух основных частей: тело и мозг. Тело - это само транспортное средство, которое состоит из механических частей (колеса, двигатель), а мозг - это мощный компьютер, оснащенный множеством датчиков (камер, радаров, лазерных сканеров) и сложным программным обеспечением (ПО) на основе ИИ;
- Искусственный интеллект - это очень многогранное понятие. Это как компьютерная программа, которая умеет решать задачи, которые обычно требуют человеческого ума. Например, распознать на картинке кошку;
- Машинное обучение - это один из самых эффективных способов создания ИИ. Вместо того, чтобы вручную программировать каждое правило дорожного движения (например, если светофор горит красным цветом - остановись, если зеленым - продолжай движение), разработчики создают алгоритм, который учится на примерах. Они показывают ему миллионы фотографий с дорог, где отмечены машины, пешеходы, знаки. Алгоритм, как ребенок, начинает находить закономерности и учится распознавать объекты.
Уровни автономности вождения
Чтобы во всем мире не было путаницы, инженеры и разработчики договорились о единой шкале. Это стандарт SAE J3016. Он включает 6 уровней.
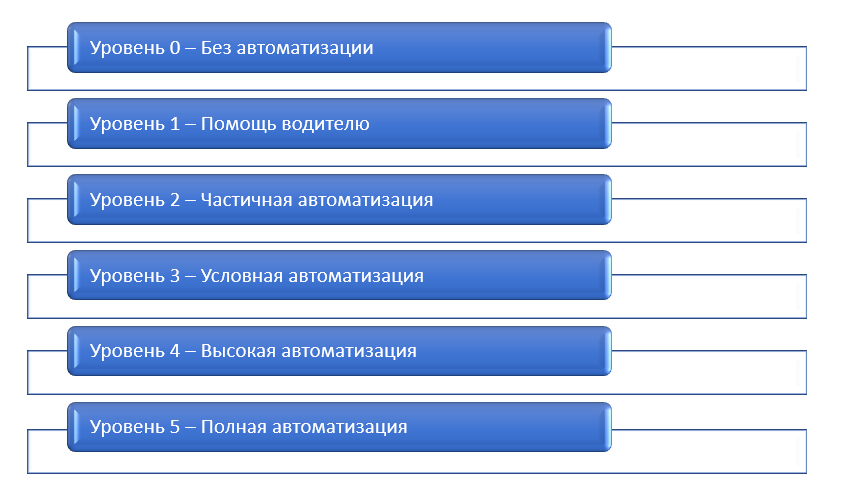
- Уровень 0 - Без автоматизации. Водитель единственный командир в машине;
- Уровень 1 - Помощь водителю. Водитель + одна автоматическая функция. Появился скромный помощник. Он может взять на себя либо руление, либо газ или тормоз;
- Уровень 2 - Частичная автоматизация. Водитель + две автоматические функции. Помощник водителя стал умнее и теперь может одновременного и рулить, и контролировать скорость;
- Уровень 3 - Условная автоматизация. В определенных условиях (например, на трассе) машина полностью берет на себя управление. Однако за пределами трассы внимание водителя должно быть приковано к дороге;
- Уровень 4 - Высокая автоматизация. Машина ездит полностью самостоятельно, но в ограниченной зоне (например, в центре конкретного города). Внутри этой зоны водителю не нужно беспокоиться об управлении транспортным средством;
- Уровень 5 - Полная автоматизация. Автомобиль движется самостоятельно в любых условиях. Снег, ливень, бездорожье - системе все не по плечу.
Архитектура беспилотного транспортного средства
После рассмотрения теоретических основ автономного вождения, переходим к практическому воплощению этих технологий.
Ярким примером такого воплощения является система Waymo Driver пятого поколения. В отличие от других прототипов с громоздким оборудованием, это поколение демонстрирует отличную интеграцию, где мощность скрыта за продуманным дизайном.
Чтобы наглядно представить, как организовано восприятие у этого автомобиля, рассмотрим его схематическое расположение.
Основные элементы восприятия окружающей среды:
- Радар;
- Камера;
- Лидар.
Разберемся же, как эти элементы работают (их принцип действия), а также взаимодействуют друг с другом.
- Лазер генерирует тысячи импульсов в секунду в разные стороны. Импульсы, отражаясь от объектов, возвращаются обратно. Процессор вычисляет расстояния до различных объектов и строит облако точек. Облако точек выглядит как трехмерный скелет окружающего мира, где каждая точка имеет точные координаты.
- Камеры расположены по периметру, обеспечивая круговой обзор. Они отвечают за распознавание цветов (например, светофоры, знаки), чтение текста и детальное распознавание объектов.
- Радар использует радиоволны и его работа основана на эффекте Доплера. Если объект приближается - отраженная волна имеет более высокую частоту, если удаляется - более низкую частоту. Радар необходим для того, чтобы определять: как быстро движется объект и в каком направлении.
Взаимодействие элементов восприятия окружающей среды
Представим ситуацию: впереди нашего транспортного средства произошла авария с включенными аварийными сигналами.
- Лидар создаст пространственную модель местности, но не сможет определить: что это - автомобиль или другое препятствие. "Недалеко находится неподвижный объект сложной формы".
- Радар определит расстояние до объекта, измерит относительную скорость. "Неподвижный объект находится на расстоянии 85 метров".
- Камеры распознают цвет мигалок, человека, стоящего у автомобиля, и сам транспорт. "Это автомобиль с включенными аварийными сигналами".
Центральный компьютер получает комплексную информацию: "В 85 метрах аварийный автомобиль с включенной аварийной сигнализацией, рядом находится человек. Объект неподвижен, необходимо перестроиться в соседний ряд".
Мозг и сознание беспилотного автомобиля
Сенсорная система - это лишь, так сказать, "органы чувств" беспилотника. Она генерирует гигантские объемы данных: миллионы точек лидара, пиксели с камер, радиолокационные эхо-сигналы. Однако сами по себе эти данные бесполезны. Ключевой вопрос заключается в том, а как это информация превращается в осмысленное понимание дорожной ситуации.
Этот процесс осуществляет мозг автомобиля - сложная иерархическая система программного обеспечения, построенная на алгоритмах искусственного интеллекта и машинного обучения. Его работа напоминает работу человеческого сознания, проходя путь от восприятия данных до сложного прогнозирования и принятия решений.
Уровень 1 - Восприятие
На данном этапе происходит сбор данных с помощью "органов чувств" автомобиля. Вся полученная информация сливается в единую, целостную модель окружающей среды.
Результатом уровня восприятия является следующее: машина создает пространственную карту вокруг себя с размеченными, классифицированными объектами.
Уровень 2 - Предсказание
Обладая точной картиной настоящего, мозг автомобиля пытается заглянуть на несколько секунд вперед. Это одна из самых сложных и интеллектуальных частей.
Система анализирует движение каждого объекта и пытается предугадать его намерения. Например, если автомобиль в соседнем ряду включил правый поворотник и начал смещаться к обочине, то с высокой вероятностью он собирается остановиться или припарковаться.
Результатом уровня предсказания является следующее: машина имеет набор вероятных сценариев развития событий на ближайшие 5-10 секунд.
Уровень 3 - Планирование
Имея на руках карту настоящего и набор прогнозов на будущее, автомобиль должен принять решение и о своих дальнейших действиях. Планирование происходит на трех подуровнях:
1. Маршрутное планирование. Система строит оптимальный маршрут по дорогам. Пример: как доехать из точки А в точку Б.
2. Поведенческое планирование. Система выбирает одну из поведенческих стратегий (как вести себя на текущем отрезке пути):
- Оставаться в своей полосе;
- Перестроиться для обгона;
- Снизить скорость, потому что впереди поворот;
- Уступить дорогу пешеходу.
3. Локальное планирование. Система просчитывает идеальную траекторию - плавную кривую, по которой должен двигаться автомобиль.
Результатом уровня планирования является следующее: машина генерирует точную, безопасную и плавную траекторию движения на несколько секунд.
Уровень 4 - Исполнение
На этом этапе мозг отдает физические команды телу автомобиля. Результатом уровня является следующее: автомобиль выполняет маневр.
Реализация уровней в единой системе
Все четыре уровня, которые относятся к сознанию автомобиля, реализуются в единой системе. Представим бесконечный цикл, которые повторяет десятки раз в секунду. Разберем реализацию уровней на конкретном примере.
1. Восприятие. Я вижу: впереди идущая машина замедляется, а пешеход на тротуаре повернул голову в мою сторону;
2. Предсказание. С вероятностью 80 % машина впереди будет тормозить. С вероятностью 20 % пешеход может выйти на дорогу.
3. Планирование. Моя текущая стратегия - двигаться с потоком. Но из-за торможения машины впереди, я должен сменить ее на "снизить скорость и увеличить дистанцию". Моя траектория - плавно замедлится.
4. Исполнение. Команда тормозной системе.
5. Возврат к уровню восприятия. Через, примерно, 0.1 секунду цикл повторяется с новыми данными.
Преимущества и недостатки технологии
Преимущества
- Наиболее очевидным и значительным преимуществом беспилотного транспорта является повышение безопасности на дорогах;
- Повышение безопасности приведет к росту эффективности и оптимизации транспортных систем. Когда беспилотные автомобили могут координировать свои действия. Так, согласованный стиль вождения не только разгружает дороги, но и приводит к экономии топлива и энергии, что делает транспорт более экологичным и дешевым в эксплуатации;
- Повышение эффективности, в свою очередь, открывает третье преимущество - социально-экономические преобразования. Пожилые люди, подростки, люди с ограниченными возможностями получат возможность самостоятельного передвижения, что резко повысит их качество жизни и социальную вовлеченность.
Недостатки
- Несмотря на преимущества данной технологии, путь к светлому будущему сопряжен с рядом серьезных технологических вызовов. Искусственный интеллект все еще сталкивается с трудностями. Одна из таких - этическая проблема. Заключается проблема в том, как должен поступить автомобиль в ситуации неминуемой аварии, когда любой выбор приведет к негативным последствиям.
- На сегодняшний день в большинстве стран мира отсутствует законодательная база, регулирующая использование беспилотного транспорта. Самый острый вопрос: кто будет нести ответственность в случае аварии ? (владелец автомобиля, производитель программного обеспечения или же компания-разработчик алгоритма).
- Но даже если правовые барьеры будут преодолены, то общество столкнется с масштабными социально-экономическими последствиями. Наиболее болезненным из них станет массовое вытеснение профессий, связанных с управлением транспортом. Миллионы водителей такси, грузовиков, автобусов могут оказаться без работы, что потребует глобальных программ переобучения.
Выводы
В рамках данной статьи было проведено небольшое изучение роли искусственного интеллекта и его механизмов в системе управления беспилотным транспортом.
Результаты показали: с одной стороны открываются колоссальные перспективы в повышении безопасности, мобильности и оптимизации транспортных систем, с другой - на пути массового внедрения стоят серьезные технологические, юридические, этические и социально-экономические вызовы.
Однако, несмотря на преимущества и недостатки, можно с уверенностью утверждать: мы стоим на пороге самой масштабной трансформации транспорта со времен изобретения самого автомобиля!
А вы бы рискнули поехать в беспилотном такси прямо сейчас? Делитесь мнением в комментариях!