
(Дополнение к статье №5)
ГЛАВА 1
ЧАСТОТНЫЕ МЕТОДЫ РАДИОЛОКАЦИИ
Как не бывает будущего без настоящего и
настоящего без прошлого, так невозможно
осознать новое не познав старого.
На настоящий момент времени существуют два частотных метода радиолокации, традиционный [2] и нетрадиционный [6, 31, 32 из статьи №5], которые позволяют осуществить раздельное измерение, по крайней мере, расстояния до цели и радиальную скорость её движения. Причём, как будет показано далее, при использовании нетрадиционного частотного метода радиолокации можно организовать также и всестороннюю пеленгацию цели [31, 32 из статьи №5], что делает данный метод, по сравнению с традиционным, более соответствующим своему названию, т. е. методу радиолокации, так как позволяет определять не два, а, по крайней мере, три параметра цели (дальность до цели, её радиальную скорость, направление на цель и её пеленги). И сделать это не только раздельно как при традиционном частотном методе радиолокации, а и практически одновременно. Очевидно, что представить себе, что такое нетрадиционный частотный метод радиолокации (НЧМР), не познав того, что собой представляет традиционный частотный метод радиолокации (ТЧМР), невозможно.
1.1. ТРАДИЦИОННЫЙ ЧАСТОТНЫЙ МЕТОД РАДИОЛОКАЦИИ
Старое отличается от нового,
по крайней мере тем, что они
полностью не совпадают друг
с другом, а только частично.
Традиционный частотный метод радиолокации (ТЧМР) с момента его изобретения в 30-е годы 20-ого столетия американским инженером Дж. О. Бентли [15] был описан в разных источниках информации, в том числе в [2]. Сущность метода заключается в получении разностного сигнала (биения) частотой (Fб) на выходе сверхвысокочастотного смесителя (ССМ), используемого для перемножения двух частотно модулированных сигналов (ЧМ) и в последующем выделении биения, например, узкополосным полосовым фильтром (УПФ). Двух ЧМ сигналов: одного, излучённого приёмопередающей антенной <О> радиолокатора и второго, отражённого от цели и принятого антенной <О> через время задержки (tз) после прохождении ЧМ сигналом расстояния (2Д), от антенны <О> до цели и обратно, с постоянной скоростью (с=3×108м/сек) распространения радиоволн. Величину запаздывания отражённого сигнала во времени можно определить по формуле
tо=2Д/с, [2, (1.1)]
Если расстояние от отражающей цели с течением времени не меняется, т. е. цель неподвижна, то частота биений при линейной частотной модуляции равна
Fб = 2ДfдFм/с=2Дg/с, [2, (1.9)]
а при модуляции ЧМ сигала по закону симметричной треугольной кривой равна
Fб = 4ДfдFм/с=4Дg/с, [2, (1.10)]
где: fд–девиация частоты; Fм–частота модуляции; g–скорость изменения частоты
Формула [2, (1.10)] является приближенной и дает дискретные значения, кратные частоте модуляции. Вследствие этого измеренное расстояние может отличаться от истинного на величину, доходящую до (+/-)До, а при измерении малых расстояний даже до 2До, где
До=с/4fд, [2, (1.5)]
что определяет точность традиционного частотного метода радиодальнометрии и возможность применения ТЧМР для решения тех или иных конкретных задач.
Так, например, при решении актуальной задачи по активной защите танков [15], когда требуется определить нахождение приближающегося к танку нападающего боеприпаса (НБ) с точностью не хуже До=0,1м, необходимо иметь девиацию частоты ЧМ сигнала не менее
fд=с/4До=3×108(м/сек):4×0,1м=750МГц
и несущую частоту радиолокатора f порядка 500 ГГц, что трудно реализуемо, если вообще выполнимо при существующих на настоящее время технологиях (для сравнения см. параметры экспериментально разработанного КВЧ модуля, имеющего fд=160МГц при f=100ГГц и представленного в [3 и статье №6]
То есть использовать ТЧМР для осуществления активной защиты танков не целесообразно, хотя возможность раздельно мерить расстояния до цели и скорость её движения, а, следовательно, определять момент выдачи команды на пуск защитного боеприпаса (ЗБ) в точку упреждения, предрасполагают к этому [6 из статьи №5].
Если расстояние между радиолокатором и целью меняется (цель перемещается в пространстве), то закон изменения частоты отраженного сигнала отличается от закона изменения частоты прямого сигнала за счет эффекта Доплера.
В этом случае частота биений равна
Fб = | Fд (±)Fд |, [2, (1.6)]
где Fд – частота биений, возникающая вследствие запаздывания отраженного сигнала и определяемая по формуле [2, (1.9)]
Fдоп - частота Доплера.
Fдоп =2Vrf/с, [2, (1.7)]
где f – несущая частота радиолокатора (радиодальномера);
Vr – радиальная скорость цели, т. е. скорость перемещения цели в направлении на радиодальномер.
При движении цели и модуляции ЧМ сигнала по закону симметричной треугольной кривой можно раздельно мерить расстояния до цели и скорость её движения используя, соответственно выражения
Д=сFд/2g, [2, (1.17)]
Vr=cFдоп/2f. [2, (1.18)]
Анализируя выражение [2, (1.17)] можно заключить, что дальности до цели определяются при использовании спектров частот биений, ширина которых, также, как и ширина полос пропускания УПФ, зависит от предполагаемого диапазона дальностей, подлежащих измерению. Так, если снова обратиться к решению задачи по активной защите танков от НБ, то этот диапазон определится расстоянием порядка 100 метров [15], используемых, по крайней мере, для измерения текущих дальностей и радиальных скоростей НБ необходимых для определения моментов выдачи команд на пуск ЗБ в точку упреждения. А ширина полосы пропускания УПФ определяет чувствительность тракта обнаружения сигналов биений приемника радиолокатора и желаема быть минимально узкой, а чувствительность максимально высокой. Т. е. чувствительность приёмника зависит от мощности сигналов помех формируемых, по крайней мере, отражениями радиосигнала от Земли и выделяемых УПФ, особенно вблизи радиолокатора. Здесь следует отметить, что при неподвижном радиолокаторе спектр частот расположенный вблизи нуля и существенно влияющий на общую мощность помехи может быть подавлен, например, заградительным (режекторным) фильтром (ЗФ), подавляющим максимально частот биений расположенные вблизи нуля.
При движении же радиолокатора, например, установленном на танке, появляются сигналы со смещенными относительно нуля частотами Доплера, формируемыми отражениями радиосигнала от Земли, которые не будут подавляться в нужной мере ЗФ и чувствительность приёмника будет падать.
Таким образом, очевидно, что точность ТЧМР определяемая выражением [2, (1.5), из сатьи №5] и невозможность получения высокой чувствительности приемников радиолокаторов из-за их широких полос УПФ, определяют недостатки данного метода радиолокации, к которым можно также отнести и значительное время измерения дальности и скорости цели, которое зависит от суммарной длительности возрастающего и спадающего участков симметричной треугольной кривой, по закону которой должна изменяться частота ЧМ сигнала.
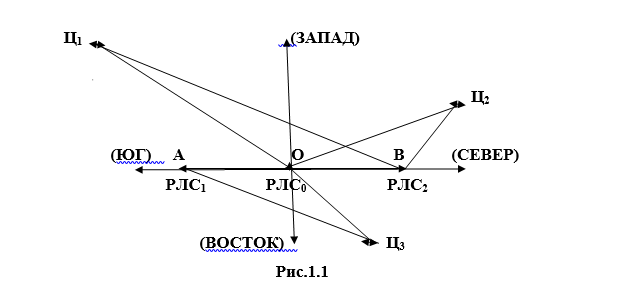
Очевидно, что о полной информации о цели можно судить лишь после того, как будут, по крайней мере, определены: дальность до цели, её скорость и местоположение в пространстве (пространственные пеленги цели). Как видно из вышесказанного, при использовании ТЧМР определить дальность до цели и её радиальную скорость возможно. А вот о применении ТЧМР для пространственной пеленгации цели в открытой печати ничего неизвестно. Возможно потому, что как следует из рис. 1.1, для определения пеленга, например, низколетящей над Землёй цели и, например, относительно направления на север, находясь при этом в точке <О> (на РЛС2), необходимо, по крайней мере, иметь три радиолокатора (три радиолокационных станции: РЛС1, РЛС0 и РЛС2).
При этом пеленг цели Ц1 (угол ВОЦ1) можно определить, если воспользоваться теоремой косинусов для треугольника ВОЦ1, в котором являются известными: сторона ОВ (задаваемая база между РЛС0 и РЛС2); сторона ВЦ1 (дальность до цели Ц1, определяемая на РЛС2) и сторона ОЦ1 (дальность до цели Ц1, определяемая на РЛС0). Аналогичным образом можно определить пеленги целей Ц2 и Ц3, определяя расстояния от РЛС до целей на трёх РЛС при заданных базах ОВ и ОА между ними. Причём при определении пеленгов целей в направлении СЕВЕР – ЗАПАД – ЮГ необходимо использовать данные с РЛС2 и РЛС0, а в направлении СЕВЕР – ВОСТОК – ЮГ данные с РЛС1 и РЛС0, чем и определяется необходимость применения трёх, а не двух, РЛС для пеленгации целей от 0 до 360 град.
Следует отметить, что для целей, перемещающихся на разных эшелонах над Землёй и излучении РЛС ЧМ сигналов, например, во все стороны (применения антенн РЛС типа изотропных излучателей), пеленги будут такими же, как и для целей, перемещающихся по Земле. А поэтому, возможно, для определения направлений на цель предпочитают использовать, например, импульсный метод радиолокации [2] и РЛС кругового обзора (РЛС с антенной вращающейся вокруг вертикальной относительно Земли оси и индикатором кругового обзора для отслеживания на нём дальностей до цели и направлений на цель). Что, очевидно, оказывается проще (всего одна РЛС кругового обзора и определения дальности) при решении задач по определению направлений на цель, а метод их пеленгации с использованием ТЧМР неактуальным, а потому малоизвестным, если вообще существующим, по крайней мере, в общеизвестной литературе [2] не отмечен.
Т. е., очевидно, можно с большой долей вероятности утверждать то, что до настоящего времени ТЧМР для определения пеленгов целей не использовался и тем более для всесторонней их пеленгации, что, как бы, наводит на мысль, что ТЧМР не совсем отвечал названию <частотный метод радиолокации>. Скорее названию <частотный метод радиодальнометрии и измерения скорости>.
Как будет показано далее, в следующих разделах блог-книги, данный пробел в полной мере может быть устранён и довольно таки успешно.
1.1.1.Устройства для реализации частотных радиолокаторов
1.1.1.1. ПРИЕМОПЕРЕДАЮЩИЕ МОДУЛИ ЧАСТОТНЫХ РАДИОЛОКАТОРОВ
Современные достижения науки позволяют успешно конструировать основные узлы высокочастотных и сверхвысокочастотных частотных радиолокаторов совмещая передатчики и СВЧ смесители приёмников , совмещенными, в минимальных объёмах.
1.1.1.1.1. ПРИЕМОПЕРЕДАЮЩИЙ МОДУЛЬ КВЧ ДИАПАЗОНА ВОЛН
В начале двух тысячных годов специалистами ФГУП <<Салют>>, г. Н. Новгород, был разработан приемо – передающий преобразовательный модуль коротковолнового частотного диапазона (КВЧ) для частотного дальномера [3из статьи №5], предназначенный для использования в качестве датчика препятствий системы предупреждения столкновений крупногабаритных транспортных средств. Состав модуля приведен на структурной схеме рис.1.2.
Основные параметры модуля, при занимаемом объеме порядка 1дм3:
- частота зондирующего сигнала – 71 ГГц;
- излучаемая мощность на частоте зондирующего сигнала – 20 мВт;
- девиация частоты – 160 МГц; коэффициент шума – 20 дБ.
По мнению разработчиков, модуль являлся пионерской в России полномасштабной ОКР – овской разработкой в 4 мм диапазоне, а оригинальность заложенных в ней технических решений являлся добротной базой разработки приборов мм диапазона.
Конструкция модуля (рис.1.3) базируется, в основном, на применении КВЧ узлов, предусмотрительно разрабатывающихся ФГУП в конце 90 – х годов прошлого столетия как научно – технический задел для продвижения на продолжающийся формироваться ещё и сейчас рынок приборов миллиметрового и КВЧ диапазонов К ним, в частности относятся: генератор, управляемый напряжением, 4 – мм диапазона на диоде Ганна типа АА763, с применением кристалла варикапа
Рис.1.2. Структурная схема приемно-передающего преобразовательного модуля
1-Стабилизатор напряжения генератора СВЧ; 2- КВЧ-генератор с электронной перестройкой частоты; 3-Масштабирующий усилитель модулирующего сигнала; 4-Вентиль; 5-Направленный ответвитель; 6-Балансный смеситель; 7-Предварительный усилитель ПЧ; 8-Приемная антенна; 9-Излучающая антенна.
Рис.1.3. Приемо – передающий преобразовательный модуль
специальной конструкции и оригинальным способом его монтажа; компактный волноводный ответвитель и балансный смеситель со стабильно реализуемыми потерями преобразования не хуже 6 дБ, на балочных смесительных диодах; однокаскадный транзисторный малошумящий предварительный усилитель с 4–х полюсным активным Чебышевским фильтром. позволяющим реализовать АЧХ с неравномерностью 0,5 дБ и обеспечивающим подавление внеполосной помехи на 30 дБ; волноводный переход с прямоугольного сечения на круглое и т. д.
1.1.1.1.2. ПРИЕМОПЕРЕДАЮЩИЙ МОДУЛЬ СМ – ДИАПАЗОНА ВОЛН
В России уже давно серийно выпускаются приемно – передающие модули сантиметрового диапазона длин волн, типа блока М45311 [4].
Электрические параметры этих блоков, согласно техническим условиям, должны соответствовать следующим техническим нормам (для М45311):
- фиксированная рабочая частота - от 15,2 до 15,4 ГГц;
- относительная точность установки рабочей частоты, отн. ед. – 2×10-4;
- относительная длительная нестабильность частоты, отн. ед. – 5×10-4;
- мощность на выходе передающего модуля – 100 мВт;
- крутизна электрической перестройки частоты при ЧМ – 75 КГц/В;
- коэффициент усиления приемного модуля – 45 дБ; - чувствительность приемного модуля в полосе 7,5 МГц - (-127 дБ/Вт);
- коэффициент шума приемного модуля на промчастоте 20КГц – 20 дБ,
при массе блока не превышающей 0,6 кг. Причем ряд параметров блока обеспечиваются конструкцией и технологией изготовления блока, гарантируются изготовителем и проверке не подлежат.
1.1.1.1.3. СЕЛЕКТОР ТЕЛЕВИЗИОННЫХ КАНАЛОВ СК-М-15.
На частотах до нескольких ГГц можно использовать схемы и технологии, по которым спроектирован, например, селектор телевизионных каналов СК-М-15 [5] или схемы и технологии сотовой связи. К преимуществам таких конструкций можно отнести, как низкую себестоимость приборов, так и отработанные технологии их изготовления, что позволяет проектировать мини РЛС даже в домашних условиях и кружках юных техников, как для практического применения, так и в познавательных целях для повышения знаний в области радиолокации.
На входе транзисторного селектора имеется высокочастотный фильтр, подавляющий помехи на частотах ниже первого телевизионного канала. Входную цепь селектора образуют переключаемые катушки индуктивности и конденсаторы.
Усилитель высокой частоты собран по схеме с общей базой. Автоматическая регулировка осуществляется изменением напряжения на базе транзистора от 4 до 9 В, нагрузкой транзистора является полосовой фильтр.Гетеродин собран на втором транзисторе по схеме емкостной трехточки с общей базой. Частота гетеродина определяется параметрами контура и емкостью варикапа Д902. На варикап через резистор подается управляющее напряжение, что позволяет осуществить электронную подстройку частоты гетеродина, при изменение управляющего напряжения от 1 до 11 В, в пределах +/-1,5МГц.
Смеситель селектора выполнен на третьем транзисторе по схеме с общим эммитером. Нагрузкой смесителя является контур. При приеме сигналов дециметрового диапазона волн смеситель селектора используется как дополнительный усилитель высокой частоты.