Гуманоидные роботы надёжно управляют разными объектами с 87% успеха, используя новый фреймворк
Роботизированные системы, которые отражают людей как по внешнему виду, так и по передвижениям, также известные как гуманоидные роботы, лучше всего подходят для выполнения многих задач, которые сейчас выполняют человеческие агенты. К ним относятся домашние дела, такие как уборка, уборка и приготовление пищи, а также транспортировка вещей или сборка продуктов.
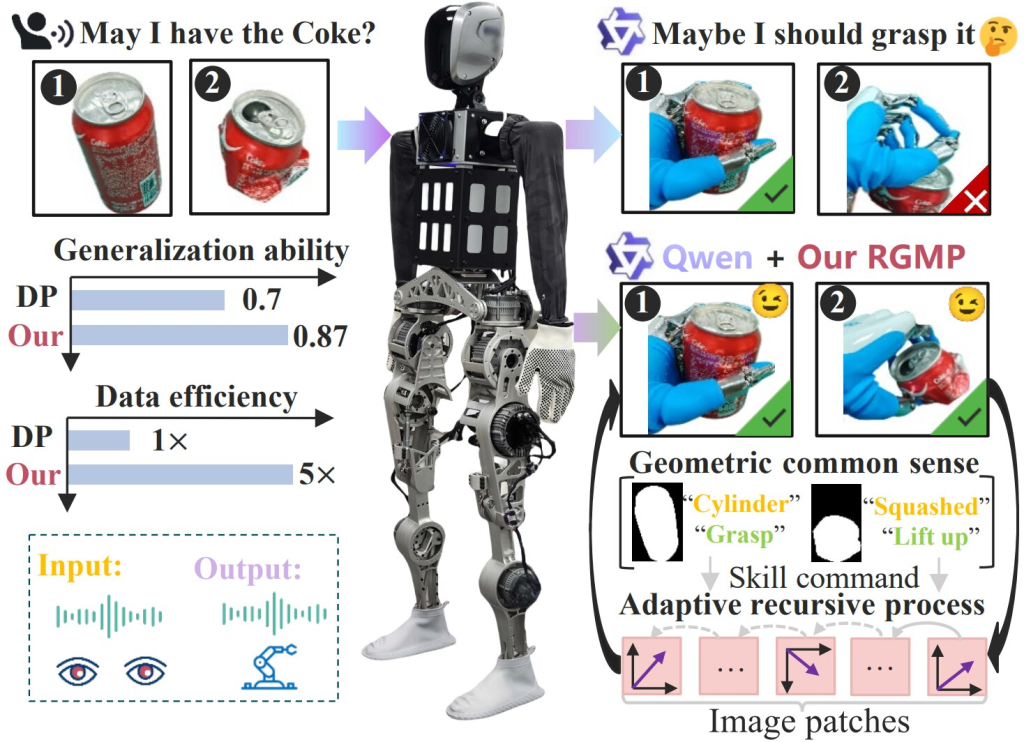
Однако для автономного выполнения этих задач гуманоидные роботы должны уметь надёжно управлять разными объектами в различных ситуациях. Однако большинство существующих моделей машинного обучения для управления роботами хорошо показывают себя в тех же условиях, что и во время обучения, но плохо — в ранее неизвестных ситуациях.
Исследователи из Уханского университета разработали RGMP (рекуррентная геометрическо-априорная мультимодальная политика) — новую структуру, которая может улучшить возможности гуманоидных роботов по манипуляции объектами. Эта структура, представленная в статье, опубликованной на сервере препринта arXiv, могла бы позволить роботам надёжно захватывать более широкий спектр объектов и успешно выполнять более ручные задачи.
«Статья была вдохновлена проблемами, которые мы наблюдали в манипуляции гуманоидными роботами, в частности ограничениями современных подходов, основанных на данных, требующих больших наборов данных для достижения надёжной производительности», — рассказал Сюэтао Ли, первый автор статьи, Tech Xplore.
«Мы стремились разработать более эффективный по данным метод, который мог бы лучше обобщать в невидимых условиях, включая геометрическое мышление в выбор навыков роботов.»
Введение фреймворка RGMP
Основной целью этой недавней работы Ли и его коллег было создание модели машинного обучения, интегрирующей геометрическо-семантическое мышление с визуомоторным роботизированным управлением гуманоидными роботами. Эта структура могла бы повысить адаптивность роботов, позволяя им надёжно управлять объектами в различных условиях даже при обучении на небольших наборах данных, учитывая контекстную информацию.
Структура команды состоит из двух основных компонентов. Первый — так называемый селектор навыков геометрического априора (GSS), а второй — адаптивно-рекурсивная гауссовская сеть (ARGN).

«GSS интегрирует геометрические априоры в модель языка зрения, чтобы помочь роботу выбирать подходящие навыки на основе формы и положения объекта», — объяснил Ли.
«ARGN, напротив, позволяет эффективно синтезировать движение, рекурсивно моделируя пространственные отношения между роботом и объектами, с которыми он взаимодействует. Такое сочетание компонентов позволяет надёжно выполнять задачи с минимальными данными, решая задачу обучения на редких демонстрациях.»
Исследователи протестировали свою структуру в серии экспериментов, применяя её на гуманоидном роботе, разработанном в их лаборатории, и на настольном роботе с двойной рукой. Их первоначальные выводы были очень многообещающими, поскольку их каркас позволял роботам успешно управлять разными объектами в большинстве тестовых сценариев.
«Наша структура сочетает пространственное мышление с эффективным обучением на основе данных, достигая 87% успеха в обобщающих тестах и на 5× более высокой эффективности данных по сравнению с современными моделями, такими как политика диффузии», — сказал Ли.
Применение робототехники и будущие направления исследований
Недавно представленная командой структура вскоре может быть дополнительно усовершенствована и протестирована на ещё более широком спектре гуманоидных роботов. В будущем это может способствовать надёжному развертыванию этих роботов в различных реальных условиях.
Фреймворк RGMP может быть особенно полезен для автоматизации задач, требующих от роботов быстрой адаптации в невидимых условиях без дополнительной подготовки. К ним относятся домашние задачи, предоставление различных услуг и ручные производственные процессы.
«Наши будущие исследования будут сосредоточены на повышении способности фреймворка RGMP обобщать в более широком спектре задач», — добавил Ли.
«Мы также планируем изучить автоматический вывод траекторий действий, специфичных для задач, что позволит роботам делать выводы о манипуляциях с новыми объектами на основе минимального человеческого участия или предварительных знаний, что ещё больше устранит необходимость в исчерпывающем обучении в динамичных условиях.»