Прогнозирование траектории движения космических аппаратов — классическая задача в астродинамике, требующая учета множества нелинейных сил. Сети с долговременной кратковременной памятью (Long Short-Term Memory, LSTM), являющиеся разновидностью рекуррентных нейронных сетей (RNN), зарекомендовали себя как высокоэффективный инструмент для решения этой проблемы. Их способность улавливать долговременные зависимости и обрабатывать последовательные данные делает их идеальными для моделирования орбитальных траекторий.
🧠 Почему именно LSTM?
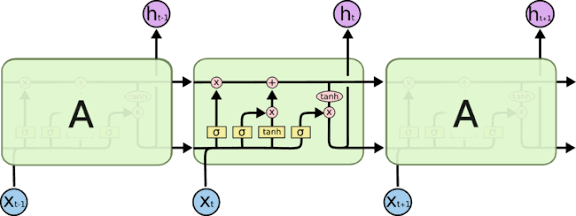
Орбитальное движение — это классический временной ряд, где состояние объекта в следующий момент времени зависит от его состояния в текущий момент и от истории движения. Традиционные RNN страдают от проблемы исчезающего/взрывающегося градиента, что делает их неэффективными для запоминания информации на длительных временных интервалах. LSTM решает эту проблему благодаря своей внутренней структуре, состоящей из ячеек памяти (cell state) и вентилей (gates), которые контролируют поток информации.
Вентиль забывания (Forget Gate): Решает, какая информация из предыдущего состояния ячейки должна быть забыта.
Вентиль ввода (Input Gate): Решает, какая новая информация будет сохранена в текущем состоянии ячейки.
Вентиль вывода (Output Gate): Решает, какая часть состояния ячейки будет использоваться в качестве выходного сигнала.
Эта механика позволяет LSTM эффективно запоминать влияние незначительных, но кумулятивных возмущений (например, малые гравитационные аномалии или световое давление) на протяжении всего полета.
⚙️ Основные архитектуры LSTM для прогнозирования
В зависимости от требований к точности и доступности данных, используются различные конфигурации LSTM-сетей.
1. Многослойная (Stacked) LSTM
Это наиболее распространенная архитектура. Несколько слоев LSTM накладываются друг на друга, где выход предыдущего слоя служит входом для следующего.
Преимущество: Увеличение глубины сети позволяет ей извлекать более сложные и абстрактные пространственно-временные признаки из входных данных. Первый слой может выучить основные законы Кеплера, а более глубокие слои могут специализироваться на обработке нелинейных возмущений.
Применение: Используется для прогнозирования долгосрочных траекторий (например, межпланетные перелеты), где кумулятивная ошибка численного интегрирования становится значительной.
2. Кодировщик-Декодировщик (Encoder-Decoder) LSTM
Эта архитектура идеальна для задач прогнозирования последовательности в последовательность (Sequence-to-Sequence).
Кодировщик (Encoder): Представляет собой одну или несколько LSTM-ячеек, которые сжимают всю входную историю орбиты (например, данные за последние 100 временных шагов) в фиксированный вектор контекста. Этот вектор содержит "суть" динамики орбиты.
Декодировщик (Decoder): Представляет собой вторую LSTM-сеть, которая развертывает этот вектор контекста, генерируя последовательность прогнозируемых состояний (например, следующие 50 временных шагов орбиты).
Применение: Эффективен для прогноза на фиксированную временную горизонт и для работы с зашумленными или неполными входными данными.
3. Бидирекциональная (Bidirectional) LSTM (Bi-LSTM)
Bi-LSTM состоит из двух независимых слоев LSTM: один обрабатывает входную последовательность вперед (от t=0 до t=T), а другой — назад (от t=T до t=0).
Преимущество: Такая структура позволяет сети учитывать как прошлые, так и будущие зависимости при формировании вектора состояния в каждый момент времени t. В контексте орбитального прогнозирования, Bi-LSTM может быть полезна для коррекции или сглаживания траектории после того, как были получены новые измерения (задача "сглаживания" или постобработки).
Применение: Чаще используется не для прямого прогноза, а для уточнения уже существующих траекторий или для повышения точности фильтрации зашумленных телеметрических данных.
📊 Входные и выходные данные
Для любой из этих архитектур ключевыми являются входные и выходные данные, которые сеть обрабатывает:
Вход: Вектор состояния АМС в момент t, который обычно включает шесть параметров (три координаты положения x, y, z и три компоненты скорости dx, dy, dz. Также могут добавляться параметры возмущений (например, текущая сила тяги или коэффициент солнечного давления).
Выход: Вектор состояния АМС в момент t+Delta t или последовательность таких векторов.
Использование LSTM в Simulink позволяет инженерам быстро импортировать обученную сеть, интегрировать ее в полный контур навигации (вместе с блоками сенсоров и контроллеров маневров) и генерировать эффективный код для бортового компьютера АМС.