В данной статье представлен обзор поэтапной разработки и верификации модели парашютной посадки беспилотного летательного аппарата (БЛА) самолётной схемы в ПО REPEAT, с использованием блока ОДУ.
Описание процесса парашютной посадки БЛА
Моделирование процесса парашютной посадки БЛА позволяет определить точку его приземления, что сократит время его поиска для повторного применения.
В типовую моделируемую системы парашютной посадки (СПП) БЛА входят следующие элементы:
- вытяжной парашют (ВП);
- основной парашют (ОП);
- метательный (пиротехнический) заряд (МЗ);
- контейнер для размещения ВП и ОП.
Процесс парашютной посадки БЛА разбивается на следующие основные этапы:
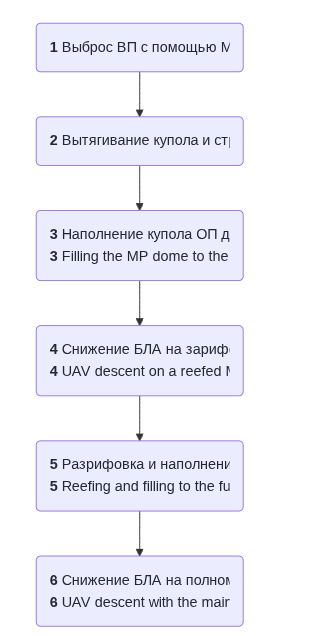
Моделирование парашютной посадки БЛА выполняется при следующих допущениях:
1. Не учитываются массы заряда и контейнера;
2. Применяемые в СПП парашюты являются безынерционными объектами;
3. Все действующие в процессе посадки БЛА силы приведены к его центру масс (ЦМ);
4. Движение БЛА в процессе посадки рассматривается как движение его ЦМ в вертикальной плоскости;
5. Сила лобового сопротивления БЛА нулевая.
Математическая модель процесса парашютной посадки БЛА
Общие уравнения движения ЦМ БЛА в процессе посадки имеют вид:
где:
X - сила лобового сопротивления БЛА;
X_п=Φ_вп⋅(ρ⋅V1^2)/(2⋅m) - сила лобового сопротивления парашюта;
G - сила тяжести БЛА: G=m⋅g
V - скорость посадки БЛА;
m - масса БЛА;
θ - угол посадки БЛА;
x - координата БЛА по Х координате;
y - координата БЛА по Y координате.
Так как отсутствуют данные по коэффициенту лобового сопротивления БЛА, X = 0.
Начальные условия для этой системы дифференциальных уравнений записываются следующим образом:
Достаточно подробный анализ модели приведен в монографии [2].
При моделировании посадки БЛА рассматриваются следующие основные этапы:
Вследствие этого общую систему сведем к трем системам дифференциальных уравнений с взаимосвязанными начальными условиями, каждая из которых описывает соответствующий этап посадки БЛА.
Модель процесса посадки БЛА на этапе 1 имеет вид:
Этап 2 посадки БЛА начинается при раскрытии основного парашюта и описывается следующей системой дифференциальных уравнений:
Этап 3 предлагается описывать моделью вида:
Исходные данные
Пусть БЛА, взлетевший с МПУ после выполнения полетного задания, осуществляет парашютную посадку в стартовой СК:
Считается, что посадка БЛА происходит при нормальных атмосферных условиях (р0 = 760 мм.рт.ст., τ0 = +15 C) и отсутствии ветра.
Исходные данные:
- Беспилотный летательный аппарат:
- Вытяжной парашют (ВП):
- Основной парашют (ОП):
- Укладка ОП:
- Остальные параметры посадки:
Начальные условия ОДУ (1 этап):
Разработка модели процесса посадки БЛА в REPEAT
Блок ОДУ предназначен для численного решения систем обыкновенных дифференциальных уравнений (ОДУ), выраженных в форме Коши (относительно старшей производной): y″=f(t,y,y′). При помощи этого блока можно описать комплексную динамическую систему.
Весь процесс настройки блока ОДУ состоит из 5 ключевых шагов:
Перед написанием системы ОДУ необходимо в блоке добавить:
- параметры входных и выходных портов;
- параметры, участвующие в процессе расчёта ОДУ;
- параметры интегрирования.
Параметры входного порта:
- timer – для снятия значения времени моделирования, участвует в формуле опΦоп(t,V).
Параметры выходных портов:
- velocity_sensor – для снятия значения параметра скорости посадки БЛА;
- theta_sensor – для снятия значения параметра угла БЛА, [рад];
- x_sensor – для снятия значения координаты x, [м];
- y_sensor – для снятия значения координаты y, [м];
- L_OP_sensor – для снятия значения длины вытянутой части ОП, [м].
Параметры :
m (double) – масса БЛА;
c_VP (double) – коэффициент сопротивления вытяжного парашюта;
f_VP (double) – площадь купола вытяжного парашюта;
ro (double) – плотность воздуха;
mu (double) – удельный вес укладки из парашютного шелка;
k (double) – эмпирический коэффициент при вычислении Φ_оп(t,V);
n (double) – эмпирический коэффициент при вычислении Φ_оп(t,V);
g (double) – ускорение свободного падения;
phi_VP (double) – эффективное сопротивление ВП;
phi_OP (double) – эффективное сопротивление ОП;
u (double) – множитель при расчете Φ_оп;
gndHit (int) – переменная-сигнал при приземлении БЛА;
c_OP (double) – коэффициент сопротивления основного парашюта;
f_OP (double) – площадь купола основного парашюта;
D_OP (double) – номинальный диаметр ОП;
d_OP (double) – средний диаметр укладки ОП.
Параметры интегрирования:
velocity – основной параметр для интегрирования производной ускорения посадки БЛА V˙, необходимый для вычисления скорости V;
theta – параметр для интегрирования производной угла θ˙;
x – параметр для интегрирования производной координаты x˙;
y – параметр для интегрирования производной координаты y˙;
l_OP – параметр для интегрирования производной ускорения раскрытия основного парашюта;
L_OP – параметр для интегрирования производной скорости раскрытия основного парашюта для определения ее длины опLоп.
После добавления параметров, в редакторе кода переходим в блок Инициализация, где созданным постоянным параметрам присваиваем значения и формируем начальные условия системы ОДУ, т.е. задаем начальные значения интегрируемых параметров. Далее описываем все три этапа в основной части кода ОДУ.
Код в редакторе блока ОДУ:
Осталось модифицировать сам проект, добавив блоки:
- Время моделирования (в разделе Симуляция), который подключается ко входному порту блока ОДУ и передает значения времени расчета модели;
- Единицы измерения угла (в библиотеке Автоматика, подраздел Функции) для перевода значения угла посадки БЛА из радиан в градусы:
Время моделирования проекта выберем равным 200 [с], шаг интегрирования и дискретизации 1 [мс]:
Результаты моделирования, верификация расчетов
Таблица 1 – Сравнительный анализ параметров при спуске БЛА
Таблица 2 – Сравнительный анализ конечных параметров при приземлении БЛА
Результаты моделирования в REPEAT показали высокую точность расчета математической модели посадки БЛА при помощи блока ОДУ, максимальная абсолютная погрешность составила 0.14 [м] (0.28 % в отн. погр.) при расчете высоты БЛА Y.
Список литературы
1. Моисеев В.С. Динамика полета и управление беспилотными летательными аппаратами: монография. – Казань: Редакционно-издательский центр «Школа», 2017. 416 с.
2. Моисеев В.С. Прикладная теория управления беспилотными летательными аппаратами: монография. Казань: Республиканский центр мониторинга качества образования (РЦ МКО), 2013. 768 с.
3. Разработка математической модели парашютной посадки беспилотного летательного аппарата - URL: https://app.repeatlab.ru/docs/ru/howto/aircraft/development_of_mathematical_model_for_UAV_parachute_landing/index.html#id2