Лесные пожары перестали быть сезонной новостью и превратились в постоянный глобальный риск. Рост температуры, засухи и сильные ветра приводят к тому, что огонь распространяется быстрее, чем успевают реагировать классические службы. Всё чаще в научных статьях и профессиональных обзорах прямо говорится: без ИИ, дронов и автономных роботов мы просто не успеем адаптироваться к новой пожарной реальности.
Автономные системы в этой области -это не один «робот-герой», а целая связка технологий:
- ИИ-обнаружение пожаров по камерам, спутникам и датчикам;
- воздушные дроны для разведки и локального тушения;
- наземные роботы-пожарные и автономные лафеты;
- единый координационный «мозг», который сводит всё в общую картину.
Ниже -без «сказок», с акцентом на реальные решения, исследования и ограничения.
Почему обычной пожарной технике уже не хватает
С точки зрения физики процесса у лесного пожара два ключевых параметра: скорость распространения фронта и интенсивность тепловыделения. В условиях сильного ветра и низкой влажности фронт может смещаться на километры в час, а локальная температура в очаге достигает 800–1000 °C. При таких сценариях:
- наземные расчёты не успевают безопасно выйти на кромку;
- видимость в дыму резко падает;
- любые ошибки в оценке направления ветра приводят к «обходу» огнём и гибели людей.
Как подчёркивают обзоры по робототехнике для лесных пожаров, одна из главных задач роботов -не заменить пожарных, а убрать людей из наиболее опасных зон, оставив им функции принятия решений и общей тактики.
Уровень 1: ИИ для сверхраннего обнаружения
Чем раньше найден очаг, тем меньше нужны «героические» усилия на земле. Поэтому первая линия обороны -не роботы с водой, а системы наблюдения.
Камеры + ИИ
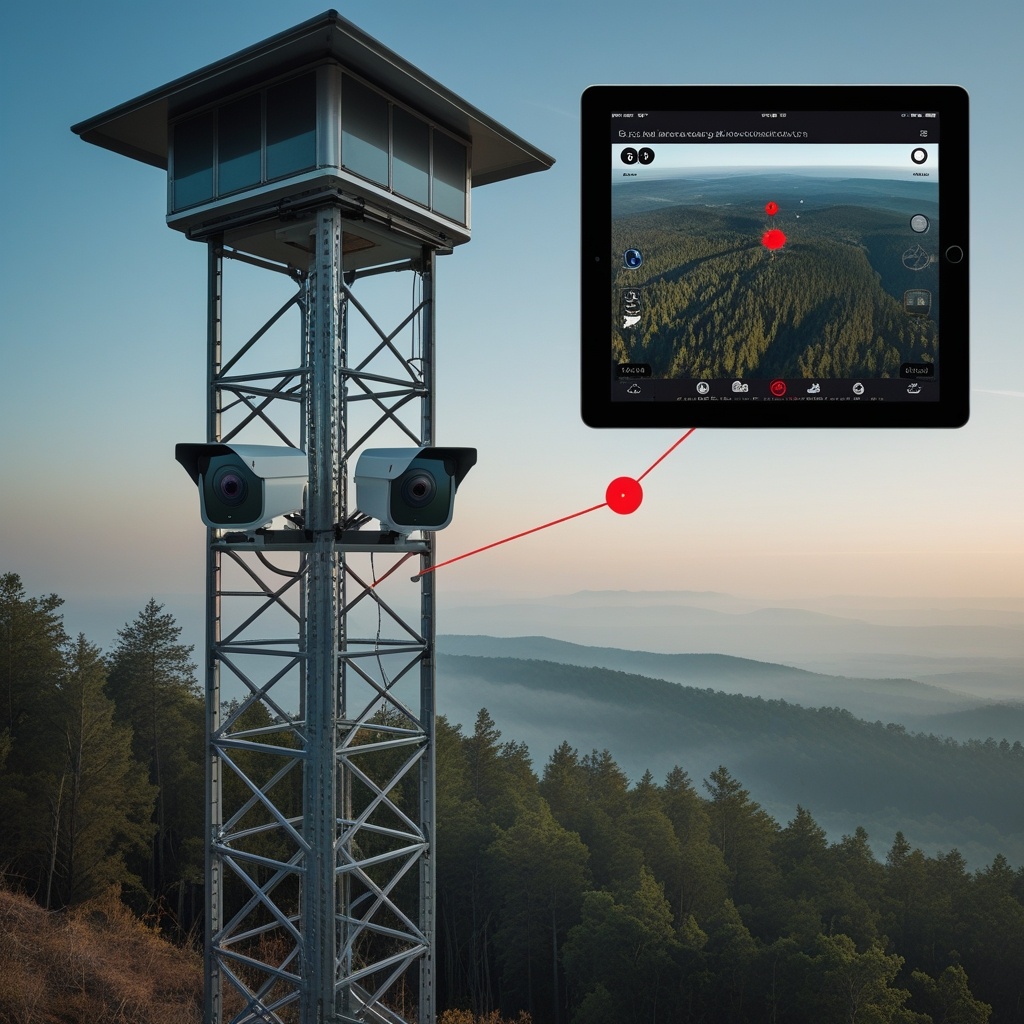
Стартапы вроде Pano AI разворачивают сети из ультра-HD камер на вышках сотовой связи и пожарных башнях. Камеры делают 360-градусный обзор примерно раз в минуту, а нейросеть анализирует картинку на наличие дыма и других признаков пожара. При обнаружении система триангулирует координаты и отправляет данные в диспетчерский центр, где дежурные уже подтверждают инцидент.
По данным компаний и региональных программ, такие системы способны фиксировать задымление за 3–15 минут после начала пожара, в том числе ночью, когда обычные очевидцы спят.
Сети датчиков в лесу
Другой подход реализует, например, Dryad Networks: на деревьях размещаются маломощные газовые/дымовые сенсоры, объединённые в IoT-сеть с использованием энергоэффективной связи. Они реагируют на тлеющую фазу – возгорание подстилки ещё до появления открытого пламени. При обнаружении аномальной концентрации газа система отправляет сигнал в центр мониторинга и, при необходимости, активирует дрон-разведчик.
Спутники и тепловизоры
Спутниковые системы с тепловыми каналами (FLIR, системы на базе Sentinel и др.) обеспечивают широкий охват и позволяют автоматически выделять горячие точки, особенно в труднодоступных регионах. Их разрешения и периодичность съёмки пока уступают камерным и датчиковым системам, но они важны как фоновая «сеть-радар» на большие площади.
Уровень 2: дроны как воздушный компонент
После первичного сигнала нужно быстро понять:
- где именно находится очаг;
- какова площадь и высота пламени;
- какие препятствия и дороги есть вокруг;
- есть ли смысл отправлять людей.
Здесь подключаются беспилотники.
Разведка и мониторинг
Современные UAV для пожаротушения оборудуются:
- тепловизорами (FLIR);
- оптическими камерами;
- иногда - газовыми датчиками.
Нейросети на борту или на земле анализируют потоки видео, выделяют контур пожара, прогнозируют направление распространения по данным о ветре и рельефе.
В недавних работах показано, что связка «сенсорная сеть в лесу + автономный дрон, вылетающий по сигналу» позволяет уменьшить время до получения детальной картины очага до единиц десятков минут, а в некоторых тестах -до считанных минут.
Локальное воздействие
Пока что дроны в основном используются как глаза и карта. Но уже тестируются:
- сбросы небольших порций воды/химикатов на ранних стадиях;
- управляемый «плановый поджог» (отжиг) с воздуха, когда маленькие дроны с зажигательными капсулами создают полосы выгоревшей земли на пути фронта пожара.
Такие методы требуют строгой регуляции, но с точки зрения физики позволяют тонко управлять топливной нагрузкой леса.
Уровень 3: наземные автономные роботы-пожарные
Здесь начинается то, что обычно и представляют под словом «робот-пожарный».
Классы наземных роботов
- Тактические гусеничные платформы крупного размера
Примеры - системы Magirus AirCore/FireBull и похожие tracked fire engines: машины на гусеницах с турбинной установкой для распыления воды/пены и термокамерами. Они способны работать в зонах высокой температуры, отгоняя людей на безопасное расстояние. - Тактические роботы сопровождения
Например, Wolf R1 от Magirus -дистанционно управляемый робот для работы в зонах с высоким риском обрушения, химических выбросов или сильного нагрева. Он тянет рукава, проводит разведку в дыму, может нести лафетный ствол. - Специализированные роботы для дикой природы
Компании вроде Wildfire Robotics развивают платформы (Firewall Robot), рассчитанные именно на работу в условиях высокой задымлённости и неровного рельефа, минимизируя необходимость присутствия людей на кромке огня. - Стационарные/полустационарные автономные системы
Например, FlameRanger -система автономного пожаротушения, которая с помощью компьютерного зрения обнаруживает очаги и управляет лафетным стволом без оператора. Сейчас она ориентирована на промышленные объекты, но принципы идентичны: ИИ локализует источник и наводит воду/пену за доли секунды.

Где здесь ИИ
В наземных роботах ИИ отвечает не за «героизм», а за вполне конкретные задачи:
- компьютерное зрение для распознавания пламени, дыма, препятствий;
- построение карты местности в условиях слабой видимости (SLAM в дыму, по лидарам и радару);
- планирование маршрута так, чтобы минимизировать риск «запирания» робота огнём;
- Стоимость и обслуживание
Современные гусеничные роботы и сложные ИИ-системы стоят дорого, их нужно обслуживать, обучать персонал, интегрировать с существующей инфраструктурой. Отчёты и обзоры подчёркивают, что экономические факторы -одна из главных причин, почему массовое внедрение идёт медленно.
В работах последних лет активно исследуется связка «воздушный дрон + наземный робот»: дрон сверху видит картину, наземный робот снизу выполняет физическое тушение и работу с завалами.
Ограничения и проблемы внедрения
На бумаге и в демонстрационных роликах всё выглядит почти идеальным. В реальности список трудностей немалый.
- Стоимость и обслуживание
Современные гусеничные роботы и сложные ИИ-системы стоят дорого, их нужно обслуживать, обучать персонал, интегрировать с существующей инфраструктурой. Отчёты и обзоры подчёркивают, что экономические фак одна из главных причин, почему массовое внедрение идёт медленно. - Непредсказуемый рельеф
Лес - не ровное поле. Ветви, корни, камни, овраги. Робот должен быть достаточно проходимым и умным, чтобы не застрять или не перевернуться. Это требует сложной механики (шарнирные гусеницы, артикулированные шасси) и продвинутых алгоритмов навигации. - Надёжность ИИ в экстремальных условиях
Дым, жара, блики, пепел - всё это усложняет работу камер и сенсоров. Алгоритмы компьютерного зрения приходится обучать на специальных датасетах, имитирующих реальный «ад» на пожаре. Даже так в сложных ситуациях всё ещё нужны операторы, которые могут взять управление на себя. - Регуляторика и ответственность
Кто отвечает, если автономный робот повредит технику, нанесёт вред инфраструктуре или ошибётся с направлением огнетушения? Как регулировать массовые вылеты дронов над пожарами, чтобы не мешать авиации? Законодательство во многих странах пока догоняет технологии.
Что реально будет меняться в ближайшие 5–10 лет
Если убрать маркетинговый шум, довольно реалистичными выглядят следующие тенденции:
- массовое распространение систем раннего ИИ-обнаружения на базе камер и спутников, как у Pano AI и аналогичных проектов -уже сейчас они работают в США, Канаде, Австралии, расширяясь за счёт инвестиций и партнёрств с энергокомпаниями и страховщиками;
- развитие больших пилотных зон с IoT-датчиками в лесу (подход Dryad и др.), особенно вокруг населённых пунктов и критической инфраструктуры;
- увеличение парка наземных роботов сопровождения и тяжёлых гусеничных платформ в пожарных службах -сначала как редкий, но стандартный ресурс для самых опасных сценариев;
- постепенный переход от чисто дистанционного управления к настоящей автономности «под контролем человека»: роботы сами выбирают маршрут и режим тушения, а оператор утверждает задачи и следит за безопасностью.
Автономные роботы-пожарные и ИИ в лесных пожарах - это не про «железного супергероя», а про постепенное превращение системы реагирования в распределённую, многослойную сеть. Чем раньше она «увидит» огонь и чем меньше людей окажется на прямой линии фронта, тем больше шансов, что лес, дома и сами пожарные выстоят.
теги: лесные пожары, искусственный интеллект, роботы-пожарные, дроны, спутниковый мониторинг, IoT датчики, Pano AI, Dryad Networks, автономные системы, климатические изменения, пожарная безопасность, современные технологии, робототехника