Несмотря на отчаянную нехватку времени, я таки начал работу над статьями посвященными британским зенитным ракетам)
Еще не успели отгреметь последние сражения Второй Мировой Войны, а британский флот уже начал размышлять “а как быть дальше?” Военная технология за время войны изменилась радикально, и все указывало на то, что эта тенденция будет только продолжаться.

Торпедоносцы и пикирующие бомбардировщики, чей звездный час пришелся на военные годы, стремительно уходили в прошлое. Основной угрозой военным кораблям в ближайшем будущем виделся скоростной высотный бомбардировщик, запускающий управляемые бомбы или ракеты с безопасного удаления – из-за пределов досягаемости обычных зениток.
Пытаясь решить проблему, британский флот сделал ставку на разработку универсальных 152-мм орудий с автоматическим заряжанием и новой системой управления огнем, способной обеспечить поражение целей на вдвое большей дистанции, чем у обычных 114-мм и 133-мм орудий. Но многие специалисты высказывали сомнения в эффективности тяжелых зениток, и указывали, что относительно небольшой прирост дальности действия авиационного вооружения сделает их малоэффективными.
Решением могла бы стать управляемая зенитная ракета большой дальности. И тут у британцев был козырь в рукаве – революционная на тот момент концепция полностью автоматического наведения ракеты методом “оседланный луч”. Вкратце она сводилась к тому, что ракета автоматически удерживала себя в узком вращающемся луче сопровождающего цель радара. Преимуществами такой концепции были:
* Полная автоматизация наведения – радар автоматически сопровождал цель, и ракета автоматически шла по лучу радара;
* Возможность выпустить по одной цели несколько ракет – любое количество ракет одновременно могли идти по одному и тому же лучу, не требуя отдельного канала наведения для каждой;
* Нечувствительность к помехам – приемная антенна ракеты была направлена назад, и принимала мощный и четко модулированный сигнал радара. Никакая помеха от цели не сумела бы “забить” управляющий сигнал;
Британское Министерство Снабжения с 1944 года работало над экспериментальной зенитной ракетой “Brakemine”, использующей технологию “оседланный луч”. Первые испытания состоялись в сентябре 1944. Хотя программа и не увенчалась успехом, она продемонстрировала жизнеспособность концепции, что привлекло внимание адмиралов.
В декабре 1944, комиссия Адмиралтейства по управляемым снарядам сформулировала требования к корабельной зенитной ракете, предназначенной для зональной обороны конвоев и соединений от воздушных атак. Ракета должна была перехватывать тяжелые бомбардировщики и патрульные самолеты, летящие на высоте не менее 12.000 метров на скорости не менее 800 км/ч. Максимальная длина ракеты задавалась не более 6 метров (12 футов), вес не более 230 кг (500 фунтов), и весь ракетный комплекс должен был вмещаться в пространство, занимаемое стандартной 133-мм спаренной артиллерийской установкой.
Проект получил название LOPGAP, что расшифровывалось как Liquid Oxygen-Petrol Guided Anti-aircraft Projectile, т.е. Кислород-Бензиновый Управляемый Противовоздушный Снаряд. Впрочем, в исходном виде он просуществовал недолго – морякам до такой степени не нравилась идея работать на кораблях с жидким кислородом, что они категорически потребовали изыскать ему замену.
К работе над проектом приступила компания “Fairey Aviation”, уже работавшая над небольшой зенитной ракетой “Stooge”, предназначенной для самообороны кораблей от камикадзе. По распоряжению Адмиралтейства, работу над “Stooge” прекратили и усилия перебросили на проект LOPGAP.
В конце 1945, программу – как и все британские ракетные программы – передали государственной корпорации RAE (англ. Royal Aircraft Establishment), в ведение Отдела Управляемых Вооружений. В начале 1947, требования к программе уточнили: ракета сильно подросла в размерах, и теперь ее максимальный вес задавался уже в 820 кг (1800 фунтов).
Примерно в это же время впервые в официальных документах появилось и название “Seaslug” – что расшифровывалось как “морская пуля”. Название оказалось созвучно “Sea Slug”, т.е. “морской слизень” (вид голожаберных моллюсков). Флоту такое созвучие не понравилось, но попытка переименовать программу в “Triumph” успехом не увенчалась.
В 1947 году, флот, обеспокоенный низким темпом работ над программой (связанным с послевоенным оттоком кадров из военной промышленности) связался с сэром Генри Тизардом, главой Комитета Политики Оборонных Исследований и настоял на включении “Seaslug” в список четырех приоритетных направлений – вместе с наземной зенитной ракетой “Red Heathen” (будущая “English Electric Thunderbird”), управляемой противокорабельной планирующей бомбой “Blue Boar” и ракетой “воздух-воздух” “Red Hawk” (будущая “Fairey Fireflash”).
Но уже весной 1948 года над программой стали сгущаться тучи. Комитет Политики Оборонных Исследований решил, что инженерных кадров не хватает для всех ведущихся ракетных программ, и рекомендовал исключить “Seaslug” из числа приоритетных. Аргументировалось это тем, что воздушная угроза флоту в ближайшем будущем невелика, и гораздо более актуальна угроза со стороны подводных лодок.
Тут флот нашел неожиданную поддержку со стороны армии. Генералы опасались, что их дальнобойная зенитная ракета “Red Heathen” (будущая “English Electric Thunderbird”) - включающая множество технических новинок, таких, как полуактивное самонаведение – окажется слишком сложной и технологически рискованной. “Seaslug”, по которому работы уже вовсю шли, выглядел хорошим “аварийным” решением.
В итоге в 1949 программе “Seaslug” вновь дали высший приоритет. Саму программу разделили при этом на две стадии. На первой, предполагалось к середине 1950-ых создать ракету с дальностью около 32 км (20 миль), способную перехватывать только дозвуковые цели. На второй, предполагалось к концу 1960-ых создать усовершенствованную ракету, способную справляться со сверхзвуковыми целями на значительно большей дистанции.
В 1949 начались испытания первых прототипов, разделенных на две серии. Серия CTV (англ. Control Test Vehicle) предназначалась для испытаний аппаратуры управления, и представляла собой маленькие сверхзвуковые планеры без двигателей, запускаемые с помощью связки твердотопливных ускорителей. На них отрабатывали способность автоматики удерживать ракету в луче радара – сначала неподвижном, затем движущемся. Серия RTV (англ. Rocket Test Vehicle) предназначалась для отработки двигательной установки; жидкостного ракетного двигателя на азотной кислоте и керосине (рассматривались и иные варианты топливных пар).
Тогда же в рамках программы “проект 502” министерство снабжения начало подыскивать будущего производителя для серийных ракет. В итоге был сформирован консорциум из авиакомпании “Armstrong Whitworth Aircraft”, производителя автопилотов “British Sperry и электронного гиганта “General Electric Company” (не путать с американской “General Electric”!). Вместе, они представили проект серийной ракеты в начале 1950-ых. На тот момент, она еще напоминала LOPGAP, т.е. имела тандемную компоновку со стартовым ускорителем позади.
Результат морякам не понравился. Длинная и тонкая ракета, по их мнению, была бы очень неудобна в обращении – и непригодна для размещения на небольших кораблях. С точки зрения адмиралов короткая и толстая ракета была бы гораздо лучше. Инженеры переработали проект, заменив один хвостовой ускоритель – пакетом из четырех, охватывающих корпус ракеты.
Для первых тестов в 1954 году использовали специальный стенд “Clausen Rolling Platform” на базе Аберпорт. На 750-тонной стальной платформе, плавающей в специальном бассейне, установили прототип пусковой установки и системы управления огнем с радаром Тип 901. Система гидравлических актуаторов двигала и накреняла платформу в желаемом темпе, имитируя качку и крен корабля в море; таким образом ряд ключевых аспектов корабельного комплекса удалось отработать на земле.
Для дальнейших экспериментов, британский флот переоборудовал вспомогательное судно – самоходную плавмастерскую “Пинли Пойнт”. На нем смонтировали полноценный ракетный комплекс, включавший пусковую установку, магазин боеприпаса, отсеки обслуживания и проверки ракет, РЛС управления ракетами Тип 901, РЛС обнаружения воздушных целей Тип 960, РЛС сопровождения воздушной цели Тип 982 и радар-высотомер Тип 983. Переименованное в HMS “Гирдл Несс”, оно рассматривалось не только как плавучий стенд для испытаний “Seaslug”, но еще и как прототип будущих ракетоносных эскортов для сопровождения конвоев.
Первоначально, “Seaslug” должен был поступить на вооружение в 1957 году. Но еще в середине 1950-ых появилась идея заменить жидкотопливный двигатель ракеты на сопоставимой эффективности твердотопливный, на смесевом пластиковом топливе. Моряки, которым идея жидкотопливных ракет на корабле совершенно не нравилась, радостно уцепились за эту возможность. Командование флота было вынуждено пойти навстречу, и согласиться на переработку “Seaslug” под твердое топливо. Что, естественно, привело к очередному затягиванию проекта.
Продолжали меняться и тактические требования к ракете. Если в начале 1950-ых ее основной задачей виделась оборона авианосных соединений в масштабном мировом конфликте – и в качестве носителей предполагались относительно крупные ракетные крейсера – то к середине десятилетия ситуация изменилась. Основной приоритет был отдан ведению локальных конфликтов – вроде только что отгремевшей Корейской Войны - а основной приоритет был отдан не обороне авианосных соединений (которые, как считалось, в локальном конфликте смогут защитить себя сами), а прикрытию конвоев и небольших боевых групп. А это означало, что основными носителями “Seaslug” становятся не большие, хоть и дорогие, крейсера, а относительно компактные эсминцы и эскортные корабли.
КОНСТРУКЦИЯ:
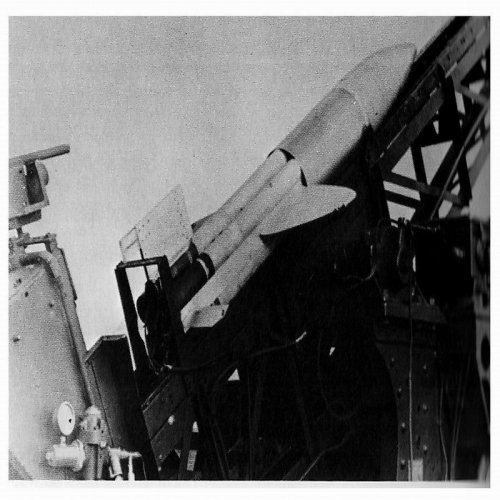
Необычно для зенитных ракет, “Seaslug” имела “пакетную” компоновку, с кольцом стартовых ускорителей, охватывающих фюзеляж ракеты. Еще необычнее – эта компоновка была реверсной. Четыре твердотопливных ускорителя размещались вокруг головной части ракеты, их сопла были направлены под углом наружу и чуть влево от фюзеляжа. При запуске, ускорители в буквальном смысле тянули ракету вперед за нос, одновременно придавая ей плавное вращение вокруг продольной оси; это было необходимо, чтобы компенсировать неизбежные флюктуации тяги твердотопливных двигателей.
Такое нестандартное решение было продиктовано, в первую очередь, габаритными соображениями. Британский флот считал, что длинной и тонкой ракетой будет неудобно оперировать в ограниченном пространстве корабля; короткая и толстая подходила для этого куда лучше. Также, расположение сопел ускорителей вблизи центра тяжести ракеты позволяло лучше стабилизировать ее в первые секунды полета – и обойтись без широких стабилизаторов, необходимых для стабилизации на дозвуковой скорости.
Суммарно, четыре ускорителя вырабатывали почти 15 тонн тяги – достаточно, чтобы разогнать массивную ракету до сверхзвуковой скорости в 2 Маха всего за три секунды. После выгорания ускорителей, резкое падение испытываемого ракетой ускорения приводило в действие механизм сброса стартовых двигателей и зажигания основного двигателя.
Сама же ракета имела достаточно традиционную компоновку. По форме она напоминала цилиндр с оживальной формы головной частью, неподвижными крестообразными крыльями в центре корпуса и аналогично расположенными воздушными рулями на корме. Длина ракеты составляла около 6 метров, диаметр – 0,41 метра. Весила ракета (без ускорителей) около тонны, из которых примерно 390 килограмм приходилось на топливо.
В движение ракету приводил твердотопливный маршевый двигатель “Foxhound”, работающий на смесевом топливе. Топливная шашка состояла из 50% перхлората аммония, 20% пикрата аммония, 15% алюминиевой пудры и 15% связывающего пластика на основе полибутана. В центре шашки был просверлен простой канал в виде звезды с восемью лучами, частично заполненный пиротехнической смесью-воспламенителем. Поджиг двигателя выполнялся электрическим запалом после отделения ускорителей; двигатель горел на протяжении 38 секунд, поддерживая скорость ракеты около 2 Маха. После выгорания двигателя, ракета могла продолжать полет еще около 27 секунд, прежде чем ее скорость упадет ниже скорости звука (после чего ее рули уже не смогли бы управлять полетом).
Необычной деталью двигателя был химический огнетушитель на тетрахлорметане. Его задачей было погасить остаточное пламя двигателя после выгорания топливной шашки. На испытаниях “Seaslug” выяснилось, что это остаточное пламя – вырывающееся из сопла под низким давлением и оттого сильно расходящееся в стороны – нарушает прием управляющих сигналов антеннами ракеты, так как ионизирует воздух позади нее. Поэтому, когда давление в двигателе падало ниже установленного, огнетушитель впрыскивал 0,58 литров тетрахлорметана и полностью гасил остатки топлива.
Системы наведения и управления ракеты размещались в хвостовой секции, вокруг длинной трубы, соединявшей камеру сгорания двигателя (в центре корпуса) с соплом. Ламповый электронный блок отвечал за прием и декодирование управляющих сигналов из луча радара. Автопилот ракеты – включавший гироскоп для стабилизации по крену и систему акселерометров для контроля по тангажу и рысканью – преобразовывал управляющие сигналы в команды для гидравлических сервоприводов рулей. Питание сервоприводов осуществлялось от газогенератора на кордитовой шашке; он приводил в действие турбонасос, поддерживающий давление в гидравлических приводах рулей, и раскручивал динамо-машину, питающую электронику ракеты.
Гидравлика управления рулями имела ограничители, которые не позволяли ракете маневрировать слишком резко на ранних стадиях полета – иначе она могла бы “вывалиться” из ведущего луча. По мере полета, ограничения степени поворота рулей постепенно ослаблялись. В непосредственной близости от цели – когда ракета получала команду на активацию взрывателя – все ограничения снимались, и ракета могла маневрировать так резко, как только выдерживал бы ее фюзеляж.
Носовой обтекатель ракеты был почти полностью занят неконтактным взрывателем. Его созданию и совершенствованию британцы уделили особое внимание. Первоначально предполагалось, что боевая часть “Seaslug” будет подрываться по команде с корабля, посылаемой, когда дистанция между ракетой и целью сократится до минимума. Однако такое решение сочли недостаточно точным (хотя и сохранили как запасную опцию).
В итоге, флот склонился к неконтактному радарному взрывателю Допплеровского типа. Размещенный в головном обтекателе, взрыватель посылал в пространство радиоимпульсы, улавливал “эхо” от цели и измерял Допплеровское смещение частоты вернувшегося сигнала. Когда Допплеровский сдвиг становился равен нулю – что означало, что цель находится точно напротив ракеты – взрыватель подавал команду на подрыв.
Первая модель взрывателя, GM1, была довольно примитивной и излучала сигнал во все стороны разом. Усовершенствованная модель GM2 использовала направленные антенны, излучавшие сигнал только по бокам от ракеты. Но даже доработанный взрыватель был ненадежен на малой высоте (отраженный от поверхности воды сигнал мог вызвать подрыв боевой части) и восприимчив к радиопомехам.
Чтобы решить проблему, инженеры разработали логический блок, называемый “Pranger” (англ. Pulse Range Gate). Этот контур проводил селекцию принимаемых сигналов по времени, отсекая те, которые приходили вне расчетного интервала – то есть со слишком большой или слишком малой задержкой. За счет этого удалось значительно повысить устойчивость взрывателя GM2 к случайным или ложным сигналам.
Однако уязвимость к ложным сигналам все еще оставалась. Поэтому специально для ракеты “Seaslug” Mk-II, инженеры разработали новый неконтактный взрыватель GW17, основанный на пассивном приеме инфракрасного излучения от цели. Теперь вокруг головного обтекателя ракеты шел ряд окошек с охлаждаемыми жидким азотом до -200 градусов фотоэлементами. Каждый фотоэлемент имел две полосы чувствительности, одну в 4300 микрон, другую в 1 микрон; вторая служила фильтром для отсечения солнечного излучения. Взрыватель срабатывал, когда на одном из фотоэлементов в полосе 4300 микрон происходил резкий скачок интенсивности излучения (т.е. цель проскакивала рядом с ракетой), в то время как в полосе 1 микрон такого скачка не происходило (т.е. источником излучения было не солнце).
Тем не менее, надежность срабатывания GW17 по-прежнему вызывала определенные сомнения, и поэтому в 1971 были рассмотрены несколько вариантов его замены, в основном на основе взрывателей для ракет других моделей. Впрочем, по финансовым соображениям пришлось ограничиться модернизацией GW17 с установкой логического блока FSSU (англ. Fuse Segment Selection Unit – Блок Селекции Сегментов Взрывателя), который фильтровал сторонние помехи - например, отражение теплового излучения цели от поверхности воды – селективно отключая часть фотоэлементов взрывателя. GW17 с блоком FSSU получили обозначение SW42.
Контактного взрывателя ракета не имела. Считалось, что прямое попадание, во-первых, слишком маловероятно, а во-вторых – само по себе будет катастрофическим для цели, учитывая вес и габариты ракеты. Первое предположение не оправдалось (на учениях, “Seaslug” неоднократно поражал беспилотные мишени прямым попаданием), а вот второе оказалось совершенно верным.
Боевая часть ракеты размещалась между взрывателем и двигателем. Модель Mk-1 несла осколочную боевую часть весом в 90 кг, из которых 73 приходились на взрывчатку. Поражающее действие осколков, впрочем, считалось неудовлетворительным, и поэтому модель Mk-2 оснащалась неразрывно-стержневой боевой частью, где поражающим элементом служил 10-мм металлический прут, сложенный “гармошкой” вокруг взрывчатого. При подрыве боевой части, прут стремительно распрямлялся в кольцо радиусом около 10 метров, способное буквально разрубить фюзеляж неприятельского самолета или ракеты.
В ходе работ над “Seaslug” неоднократно поднимался вопрос об оснащении ракеты ядерной боевой частью – призванной компенсировать недостаточную точность наведения и гарантировать поражение скоростных и маневренных целей. Несколько типов атомных боевых частей были рассмотрены: сначала “Winkle” (теоретический дизайн, не реализованный), затем “Pixie” (малогабаритная плутониевая боевая часть, испытанная в 1957 году), и наконец “Gwen” (британская версия американской W54). Все эти планы не были реализованы потому, что малогабаритные атомные требовали примерно вдвое больше дефицитного плутония, чем полноценные стратегические бомбы.
В попытке решить эту проблему, британский флот предложил использовать боеголовку “Tony” (британская версия американской атомной глубинной бомбы W44), которая работала по принципу бустирования ядерной реакции нейтронным потоком от небольшого количества термоядерного топлива. Это решало проблему с плутонием – но в начале 1960-ых британское правительство решило сократить число атомных зарядов на вооружении, и ядерный “Seaslug” был отменен.
Имелся еще один тип “боевой” части, которая могла быть вставлена на место обычной – телеметрическая. Эта “боевая” часть несла записывающую аппаратуру и радиопередатчик, и предназначалась для трансляции на корабль-носитель деталей полета ракеты. Интересно, что телеметрическая часть все-таки имела внутри небольшой взрывчатый заряд – задачей которого было безопасно разрушить ракету в конце полета и не дать ей упасть кому-нибудь на голову.
НАВЕДЕНИЕ РАКЕТ:
Как уже упоминалось, “Seaslug” наводился методом “осёдланный луч”, т.е. ракета следовала к цели вдоль луча радара, сопровождающего цель. Ведущий луч радара вращался вокруг линии визирования цели, и каждое положение луча кодировалось определенной последовательностью передаваемого сигнала – таким образом, ракета всегда могла определить, куда и насколько она отклонилась от линии визирования цели, и внести необходимые поправки.
Для наведения ракет “Seaslug” использовалась специальная РЛС Тип 901 (и ее улучшенная версия, Тип 901М). Этот радар был изначально разработан еще в годы Второй Мировой как часть системы управления огнем для перспективных 152-мм универсальных орудий; предполагалось, что за счет очень узкого луча, радар сможет обеспечить тяжелым пушкам необходимую точность целеуказания. Потом этот же радар решили использовать для наведения корабельных зенитных ракет.
Прототип радара выглядел довольно неуклюже: на станке от зенитной пушки “пом-пом” размещались две параболические антенны, одна для сопровождения цели, другая для наведения ракет. Такая конструкция морякам не нравилась, и они потребовали совместить функционал в одной антенне.
В итоге, антенна РЛС Тип 901 напоминала по форме конический барабан, увенчанный массивной диэлектрической линзой, использующейся как фокусировочная система. Позади линзы размещались три рупора-облучателя, переключаясь между которыми в определенном порядке радар перемещал луч для поиска и сканирования цели. Значительный диаметр фокусирующей системы и использование сигналов высокой частоты позволили РЛС Тип 901 продемонстрировать впечатляющие результаты: угол расхождения луча не превышал 1.6 градуса, радар обладал разрешающей способностью в 0.33 градуса по азимуту и 70 метров по дальности, т.е. мог спокойно различать несколько целей в плотном построении. Для 1950-ых, это были впечатляющие результаты, значительно превосходившие ожидания.
Но столь тонкий луч предоставлял и определенную проблему. Во-первых, стартующая ракета могла попросту промахнуться мимо луча и потерять его. Чтобы решить проблему, справа от основной антенны установили небольшую вспомогательную, генерирующую более широкий луч вокруг узкого луча основной антенны. Стартующая ракета сначала входила в широкий луч, и уже по нему приводилась к узкому.
Во-вторых, навести Тип 901 на цель оказалось нелегкой задачей. Нельзя было просто нацелить его луч по данным поисковых РЛС корабля; их лучи были гораздо шире и не давали требуемой точности. Чтобы решить проблему, в системе управления огнем были заложены несколько режимов поиска цели. Антенна радара выполняла круговые, спиральные, либо синусоидальные движения, сканируя указанную область пространства, пока не засекала цель.
Чтобы в полярных широтах линза радара не обледеневала, в пространство между ней и пластиковым обтекателем подавался аммиак – который, реагируя с водяными парами, выделял тепло, разрушающее ледяную корку. Избыток аммиака затем удалялся с антенны сжатым воздухом. На испытаниях, противолёдная система успешно удаляла слой льда с антенны примерно за полминуты.
Наведение ракеты осуществлялось по принципу “оседланный луч”. Узкий луч радара, вращающийся на 66,7 оборотах в секунду, сопровождал цель методом конического сканирования; передаваемый сигнал при этом модулировался таким образом, чтобы каждому положению луча соответствовала бы определенная характеристика сигнала. Движущаяся в луче ракета принимала сигнал, и по нему всегда могла определить – где именно относительно оси луча она находится, и в какую сторону ей надо повернуть, чтобы оставаться вблизи оси луча.
Управляющий сигнал передавался на частоте 9485 мегагерц. Он представлял собой комбинацию из восьми 38-микросекундных импульсов, передаваемых последовательно сначала вспомогательной, затем основной антенной с интервалом 2, 4 или 6 микросекунд. Промежутки между сигналами синусоидально модулировались по времени. Синхронизированный с вращением луча, этот сигнал определял для ракеты каждую конкретную позицию луча.
Аналогичным образом вырабатывался и сканирующий сигнал на частоте 9600 мегагерц, используемый РЛС Тип 901 для непрерывного сопровождения цели. По “эху” этого сигнала радар определял текущее положение цели и ориентировал антенну так, чтобы цель оставалась точно на оси луча. На случай, если неприятель попытался бы сорвать сопровождение луча с помощью радиопомех, сигнал сопровождения непрерывно варьировал случайным образом в пределах 12,5 микросекунд.
Захват цели радаром выполнялся вручную. Для начала, командир ракетной секции выбирал цель на экране кругового обзора (данные на который поступали с обзорно-поисковой РЛС Тип 965) и вербально указывал на нее оператору консоли TIU (англ. Target Indication Unit). Оператор TIU использовал джойстик чтобы навести на выбранную цель РЛС сопровождения цели Тип 992Q и РЛС-высотомер Тип 278 и затем переводил оба этих радара в режим автоматического сопровождения.
Теперь цель отслеживалась двумя радарами и данные о ней (по азимуту и углу места) непрерывно поступали в систему управления огнем корабля. Командир ракетной части активировал радар Тип 901 и выбирал режим поиска. Тип 901 начинал поиск цели в пределах определенных другими РЛС приблизительных координат. Двое операторов – один отвечал за направление, другой за дальность – наводили Тип 901 на отслеживаемую цель и устанавливали строб. После этого Тип 901 переводился в режим автоматического сопровождения цели, и система была готова к стрельбе.
Вся эта процедура занимала около 30 секунд – хотя опытный экипаж мог справиться с задачей вдвое быстрее – и считалась весьма архаичной, основанной на опыте наведения зенитных орудий. Изначально предполагалось, что РЛС Тип 901 будет наводиться при помощи поисково-сопровождающей РЛС Тип 984 (способной выдавать координаты цели с необходимой точностью), но этот радар оказался слишком большим и сложным, и в итоге устанавливался только на некоторые авианосцы – по иронии, “Seaslug” не оснащенные!
На кораблях, оснащенных ракетным комплексом “Seaslug” Mk-2, использовалась автоматизированная СУО ADAWS (англ. Action Data Automation Weapon System) на основе коммерческого цифрового компьютера Ferranti POSEIDON. Этот программируемый компьютер получал данные непосредственно от корабельных РЛС и осуществлял поиск и распределение целей, автоматическое отслеживание выбранных, наведение РЛС Тип 901М и подготовку ракет к запуску.
Система ADAWS значительно облегчала работу с комплексом “Seaslug”, а также позволяла нескольким кораблям с такими системами обмениваться данными по радиоканалу и распределять цели между собой. Она также делала возможными более сложные режимы стрельбы, чем простое движение ракеты вдоль трассы луча.
РЕЖИМЫ СТРЕЛЬБЫ:
Существовали три основных режима наведения ракет – и еще один дополнительный, использовавшийся только при стрельбе по надводным целям:
· LOSBR (англ. Line Of Sight, Beam Riding – Следование Лучу Вдоль Линии Визирования) – этот режим использовался при стрельбе по высотным целям. Запущенная ракета просто двигалась по лучу, сопровождающему цель. “Seaslug” Mark-1 мог использовать только этот режим.
· CASWTD (англ. Constant Angle (of) Sight With Terminal Dive – Постоянный Угол Визирования (с) Терминальным Пикированием) – этот режим использовался при стрельбе по низколетящим целям. Простое следование лучу в этом случае было неэффективно; “эхо” вращающегося луча от поверхности воды сбивало ракету с толку. Поэтому в режиме CASWTD ракета запускалась по азимуту цели с небольшим постоянным углом подъема – обычно около 0,5 градуса. Когда же ракета оказывалась в непосредственной близости от цели, система управления передавала команду на переход в пикирование под углом в 45 градусов.
· MICAWBER (англ. Midcourse Constant Angle (of sight) With Beam Riding – Следование Лучу с Постоянным Углом Визирования) – использовался для поражения целей на “средней” высоте около 500-800 футов (150-240 метров). В этом режиме ракета сначала запускалась под постоянным углом подъема в 0,5 градуса (чтобы избежать проблем с отражением луча от воды) а затем переводилась в режим следования ведущему лучу и шла по нему в точку перехвата цели.
· UAO (англ. Up And Over – Вверх И Через) – дополнительный режим, использовавшийся при стрельбе по надводным целям. В этом случае, радар наведения ракет Тип 901 не сопровождал цель самостоятельно, но “привязывался” к радару управления артиллерийским огнем Тип 903, получая от него данные о положении цели. Ракета запускалась вверх под большим углом, после чего луч радара Тип 901 постепенно опускался вниз, в рассчитанном системой управления огнем темпе. Следующая за лучом ракета двигалась по траектории, близкой к баллистической. Когда наклон луча радара Тип 901 уменьшался до 0,5 градусов, система управления автоматически посылала на ракету команду “планировать”. Получив эту команду, автопилот ракеты удерживал ее на постоянном угле тангажа, наводясь только по азимуту. Ракета поражала надводную цель сверху, из пологого пикирования. Неконтактный взрыватель в этом режиме отключался, чтобы не спровоцировать преждевременный взрыв ракеты.
Еще один режим стрельбы был предложен – но по всей видимости, не реализован – как альтернатива UAO для стрельбы по надводным целям. Он предполагал использование специально доработанной ракеты, оснащенной радарным альтиметром, то есть способной удерживать заданную высоту над водой. В этом режиме, ракета запускалась бы как в режиме UAO, но команда “планировать” передавалась вскоре после старта. Получив эту команду, ракета должна была перейти в горизонтальный полет на заданной высоте, поддерживая ее с помощью альтиметра и ориентируясь на луч радара Тип 901 только по азимуту.
Такой режим полета превращал бы “Seaslug” в “Си Скиммер” – противокорабельную ракету, летящую к цели над самой поверхностью воды. Малая высота полета чрезвычайно затрудняла бы перехват. При этом, поскольку единственной доработкой ракеты был бы компактный альтиметр, ее все еще можно было бы использовать против воздушных целей. Однако нет сведений, что этот режим вышел за рамки концептуального предложения.
Как уже упоминалось выше, “Seaslug” (как и большинство корабельных зенитных ракет того времени) мог также использоваться как противокорабельная ракета против надводных целей. Хотя дальность полета была ограничена линией горизонта, эффект от попадания в корабль сверхзвуковой ракеты весом около тонны был бы сравним с попаданием снаряда линкора. Правда, ввиду отсутствия у “Seaslug” контактного взрывателя, боевая часть при этом не сработала бы (в лучшем случае, можно было надеяться на частичную детонацию взрывчатки от сотрясения) и полагаться приходилось только на кинетическую энергию снаряда. Которой, впрочем, было вполне достаточно, чтобы прикончить на месте катер и вывести из строя эсминец – да и крейсеру такой удар явно не пошел бы на пользу.
ПУСКОВОЙ КОМПЛЕКС:
Магазин ракет “Seaslug” на эсминцах типа “Каунти” имел уникальную конструкцию. Он представлял собой две длинные и узкие “галереи”, тянувшиеся бок-о-бок на добрую половину длины корабля. Ракеты в магазине лежали в ряд одна за другой, и подавались на пусковую установку последовательно, по направляющим рельсам. В конце магазина – ближе к носу корабля – находился отсек обслуживания ракет.
Такое необычное решение было вызвано стремлением британского флота любой ценой избежать “single point of failure” (англ. единственной точки отказа), и катастрофической детонации боекомплекта в случае попадания прямо в ракетный магазин. Длинная “галерея”, разделенная несколькими взрывозащитными переборками, гарантировала, что даже в худшем случае экипажу придется иметь дело только с одной взорвавшейся в магазине ракетой – а не с детонацией всего боекомплекта разом. Другим фактором было также желание иметь возможность подавать ракеты на пусковую вручную, в случае отказа автоматики (конечно, довольно трудно придумать такую ситуацию, когда относительно простая электромеханика ракетного магазина сломалась, а куда более сложная электроника радара Тип 901 и пусковой установки – работают исправно…)
Боекомплект на кораблях различался в зависимости от конкретной серии. На трех эсминцах первой серии (HMS “Девоншир”, HMS “Хэмпшир” и HMS “Кент”) весь боезапас состоял из 28 ракет – 24 собранных и готовых к пуску, 1 на обслуживании, 1 инертной учебной и 2-х “демонстрационных” ракет. Последние были просто макетами, выкрашенными в ярко-красный цвет, и предназначавшимися для демонстрации на пусковой установке во время иностранных визитов и парадов.
Такой боекомплект выглядел недостаточным, и поэтому на последнем корабле первой серии – HMS “Лондон” – позади секции обслуживания ракет добавили небольшое отделение долговременного хранения. В нем на стеллажах хранились еще шесть ракет со снятыми крыльями и стабилизаторами. При необходимости пополнить боекомплект, эти ракеты собирали в секции обслуживания и подавали в магазин. Общий боекомплект, таким образом, увеличился до 34 ракет.
На четырех эсминцах второй серии (HMS “Антрим”, HMS “Файф”, HMS “Гламорган” и HMS “Норфолк”) секцию долговременного хранения значительно расширили, что позволило довести общий боекомплект до 39 ракет (включая учебные и демонстрационные). В случае боевых действий, считалось возможным довести боекомплект до 48 ракет, сгрузив все учебные и демонстрационные и заняв разобранными ракетами часть секции обслуживания.
Существовала альтернативная конфигурация ракетного магазина, предназначавшаяся для более крупных кораблей (крейсеров), но в итоге использованная только на опытовом судне HMS “Гирдл Несс”. В нем ракеты размещались на двух палубах, в четырех изолированных отделениях (по девять в каждом), между которыми проходила шахта подъемника – направлявшего ракеты к пусковой установке. Так как магазин этого типа был разработан еще тогда, когда “Seaslug” предполагался жидкотопливным, он оснащался системами автоматической заправки ракет.
Пусковая установка “Seaslug” также была уникальной в своем роде. Это громоздкое сооружение представляло собой сложной формы решетчатую раму на массивном вращающемся основании. Заряженные ракеты лежали на специальных “полках” внутри рамы, удерживаемые сложной системой фиксаторов. Такая необычная конструкция пусковой была вызвана особенностями конструкции ракеты: охватывающие головную часть “Seaslug” ускорители не позволяли удерживать ракету с помощью обычных держателей.
Первоначально, пусковая установка “Seaslug” должна была быть трёхракетной; это было вызвано тем соображением, что эффективность комплекса оценивалась довольно невысоко, и предполагалось, что не менее трёх ракет будет необходимо для 80% вероятности поражения одной цели. По мере работ над ракетой стало, впрочем, очевидно, что эти требования избыточны, и двухракетного залпа вполне достаточно. В результате, трёхракетная установка была смонтирована только на экспериментальном корабле “Girdle Ness”, а эсминцы типа “Каунти” получили двухракетные пусковые.
МОДИФИКАЦИИ
Существовали две основные модели ЗРК “Seaslug”, обозначенные как Mark-1 и Mark-2. Эти версии отличались не только моделью ракеты, но и модификациями РЛС наведения, системой управления огнем и рядом других особенностей – из-за чего были не совместимы по боекомплекту (Mark-2 изначально планировался обратно совместимым с ракетами от Mark-1, но эта возможность не была реализована):
“Seaslug” Mark-1 (GWS.1) – базовая версия с ламповой электроникой, состоявшая на вооружении с 1962 года. Ракета использовала двигатель “Foxhound” и ускорители “Gosling”; максимальная скорость составляла 2 Маха, но в момент атаки обычно сокращалась до 1,3 Маха – что ограничивало применение ракеты дозвуковыми и трансзвуковыми целями. Дальность действия ЗРК составляла 25.000 метров, потолок – 14.000 метров. Ракета оснащалась осколочно-фугасной боевой частью с радарным взрывателем.
“Seaslug” Mark-2 (GWS.2) – значительно усовершенствованная версия с твердотельной электроникой, состоявшая на вооружении с 1971 года. Ракета использовала двигатель “Deerhound” и ускорители “Retriever”; максимальная скорость составляла 3 Маха, скорость в момент атаки – 1,8 Маха, что позволяло перехватывать сверхзвуковые цели. Дальность действия – 32.000 метров, потолок – 20.000 метров. Ракета оснащалась неразрывно-стержневой боевой частью с инфракрасным взрывателем.
“Seaslug” Mark-3 (проект) – предложенное в середине 1960-ых дальнейшее развитие ракеты, с увеличенной дальностью действия. Проект рассматривался как альтернатива “Sea Dart”, но не получил развития.
“Blue Slug” (проект) – предложенная в середине 1950-ых противокорабельная ракета, использующая систему наведения и пусковой комплекс “Seaslug”. Должна была оснащаться 1500-фунтовой (680-кг) полубронебойной боевой частью, и использовать радарный альтиметр для прохода к цели на сверхмалой высоте. Проект не был реализован.
ИСТОРИЯ:
Кажется удивительным, но, несмотря на неуклюжий внешний вид и громоздкую конструкцию, “Seaslug” был достаточно точным и эффективным оружием. При стрельбе по целям на высоте более 1000 футов (300 метров), вероятность поражения одной ракетой составляла около 65%. Однако, по низковысотным целям вероятность поражения существенно снижалась и составляла лишь около 25%.
Примечательно, что на учениях “Seaslug” достаточно часто поражал цели прямым попаданием. “Тяжелые потери” неоднократно отмечались даже для сверхзвуковых дронов “Stiletto” (британская версия американского AQM-37 “Jayhawk”, способная развивать скорость до 3 Маха), по которым на учениях стреляли инертными ракетами. В попытке сберечь мишени, операторы заставляли “Stiletto” летать зигзагом – но практика показала, что маневры уклонения практически не сказывались на вероятности поражения.
Эффективность комплекса “Seaslug” оценить достаточно сложно. По своим возможностям, британская ракета как минимум не уступала ранним моделям американского ЗРК RIM-2 “Terrier” (также имевшим наведение по лучу радара), и даже превосходила его в ряде параметров. Однако, поздние версии “Terrier” – имевшие полуактивное самонаведение – были значительно эффективнее “Seaslug” практически по всем параметрам. Следует также учитывать, что реально эффективным оружием “Seaslug” стал только на второй модели, появившейся лишь в конце 1960-ых…
Первыми (и единственными) носителями “Seaslug” в итоге стали эскадренные миноносцы – впрочем, часто считавшиеся легкими крейсерами – типа “Каунти”. Восемь этих крупных кораблей вступили в строй двумя сериями в 1962-1970 годах. Первая серия оснащалась базовым “Seaslug” Mark-1 GWS.1; вторая серия изначально строилась под “Seaslug” Mark-2 GWS.2. Планы по модернизации кораблей первой серии под систему GWS.2, хотя и прорабатывались неоднократно, тем не менее, не были реализованы.
Вне зависимости от того, насколько эффективным был «Seaslug», он, несомненно, был чрезвычайно эффектным. Эсминцы типа «Каунти» с могучими зенитными ракетами на корме стали, своего рода, «визитной карточкой» Королевского Флота 1960-ых; их заходы в иностранные порты неизменно привлекали значительный интерес, а учебные стрельбы (сопровождавшиеся громадными облаками пламени и рокотом взлетающих ракет) впечатляли всех присутствующих.
К началу Фолклендской Войны, комплекс “Seaslug” считался уже безнадежно устаревшим, не соответствующим требованиям времени. Основой дальней противовоздушной обороны британского флота уже был “Sea Dart” – вдвое превосходящий по дальнобойности, более точный, а также куда как более компактный. И тем не менее, британцы взяли с собой два из трех остававшихся в строю “Каунти” – HMS “Антрим” и HMS “Гламорган” – и всерьез рассматривали реактивацию стоявшего в резерве HMS “Кент” (еще один эсминец, HMS “Файф”, стоял в ремонте, и на войну опоздал).
Все дело было в том, что составлявший основу ПВО британского флота “Sea Dart” у аргентинцев тоже был. В 1970-ых аргентинцы купили пару эсминцев с “Sea Dart”, и, таким образом, имели прекрасное представление о возможностях и ограничениях этого зенитного комплекса. Британские адмиралы всерьез опасались, что аргентинцы могли отыскать в “Sea Dart” какую-то техническую или тактическую уязвимость – и, таким образом, лишить британский флот его ключевого защитного вооружения. В этом случае на старые эсминцы с их древними “Seaslug” легла бы вся тяжесть противовоздушной обороны авианосных соединений.
21 мая 1982 года, HMS “Антрим” в первый (и в последний) раз выпустил “Seaslug” по настоящей воздушной цели – аргентинскому штурмовику IAI “Dagger”. Штурмовик шел над самой водой, и ракета, вполне естественно, промахнулась. Ряд источников утверждает, что радар Тип 901М эсминца не смог взять цель на сопровождение, и ракета была запущена “вслепую”, в надежде отпугнуть аргентинцев.
26 мая, эсминец HMS “Гламорган” тоже запустил “Seaslug” – но на этот раз по наземной цели. Аргентинский навигационный радар на аэродроме Порт-Стэнли доставлял немало головной боли англичанам, но попытки вывести его из строя воздушными ударами были безуспешны. В итоге в ситуацию пришлось вмешаться “Гламоргану”. Радиооператоры эсминца триангулировали положение аргентинского радара, и зафиксировали на нем луч Тип 901М. Последовала команда на пуск в режиме CASWTD… и спустя минуту, сверхзвуковая ракета весом в тонну врезалась в кабину аргентинского радара, не оставив от него даже мокрого места.
Этот инцидент имел неожиданные последствия – сразу после запуска, “Гламорган” вызвали по радио британские войска на берегу, объяснили, что видели огромную вспышку дыма и огня на борту эсминца, и обеспокоенно поинтересовались, не нужна ли ему помощь? Экипаж эсминца успокоил их, объяснив, что все прошло штатно. Через несколько минут с берега пришла еще одна радиограмма: “Не знаем, что именно вы сделали, но, когда вы это сделали, аргентинцы прекратили стрелять и бросились по укрытиям. Можете сделать это еще раз?”
“Гламорган” был только рад помочь. 28-30 мая, в ходе обычных обстрелов берега, эсминец выпустил еще несколько ракет “Seaslug” по взлетной полосе Порт-Стэнли. Основной идеей было помешать аргентинским воздушным операциям с аэродрома. В конечном итоге, правда, эти стрельбы закончились для “Гламоргана” не лучшим образом; эсминец был атакован противокорабельной ракетой “Экосет” с аргентинской береговой установки, и получил повреждения. Во время этой атаки состоялся последний боевой пуск “Seaslug” – правда, с единственной целью поскорее освободить пусковую установку.
Вскоре после Фолклендов, эсминцы с “Seaslug” были выведены из состава британского флота. Многие из них при этом были проданы на экспорт; несмотря на устаревшее вооружение, корабли были относительно новыми, прослужили не более 15-16 лет, и представляли значительный интерес для флотов второго и третьего мира. Эсминец первой серии “Лондон” был в 1982 году продан Пакистану, где под именем “Бабур” служил до 1993 года.
Четыре эсминца второй серии в 1982-1987 годах были проданы Чили. Первоначально, эсминцы сохранили свое ракетное вооружение (исключая бывший “Файф”, который еще на британской службе был переоборудован в учебный корабль), но в 1993 и 2001 с двух кораблей демонтировали “Seaslug”, использовав освободившееся пространство для расширения вертолетной площадки и ангара. Только бывший “Гламорган”, переименованный в “Альмиранте Латторе”, сохранил свое ракетное вооружение вплоть до списания в 1998 году. С ним завершилась история “Seaslug”.
МИФЫ:
О ракетах «Seaslug» ходит несколько устойчивых мифов... которые необходимо развеять.
* Ракеты первой модели были на жидком топливе – это миф, жидкотопливными были только испытательные прототипы. Все серийные ракеты “Seaslug” были уже твердотопливными;
* Ракеты второй модели использовали полуактивное радиолокационное самонаведение – это тоже миф; ракеты второй модели использовали такое же наведение методом “оседланный луч”, что и первой (только доработанное). Конструкция “Seaslug” не оставляла места для нормальной головки самонаведения; головной обтекатель был практически полностью занят аппаратурой взрывателя;
* Ракеты “Seaslug” были ненадежны и склонны разваливаться в полете – этот миф был порожден проблемами с ускорителями на испытаниях ракет Mark-2; отделение ускорителей часто сопровождалось повреждением фюзеляжа ракеты. К моменту принятия на вооружение, проблема была успешно разрешена;