Р.Е. Магидов, асп.; рук. В.В. Рожков, к.т.н., доц. (филиал ФГБОУ ВО «НИУ «МЭИ» в г. Смоленске)
Для отработки методики управления станочным приводом изложенной в тезисах статьи «Разработка методики обучения системы вибродиагностики станочного электропривода», было принято решение рассмотреть стратегию управления электроприводом станка для одного из самых распространённого видов металлообработки – сверления.
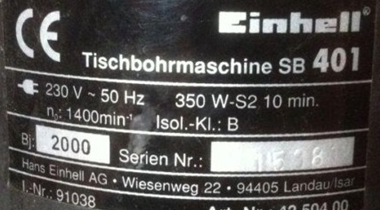
В качестве экспериментального макета выбран станок, оказавшийся в наличии — Einhel SB401, как показан на рисунке ниже.

Обычно применяемые в системах управления частотным приводом ПИ-регуляторы требуют настройки для конкретного объекта управления, чему будет посвящена данная работа.
Для разработки и последующей настройки частотного преобразователя нужно знать параметры двигателя. Производитель раскрывает не все параметры электродвигателя, только самые основные. Они приведены на рисунке ниже.
Перед тем как приступить к экспериментам на реальном объекте, требуется провести моделирование системы.
Однако для моделирования поведения системы указанных на заводской табличке параметров не достаточно.
В ходе проведенного анализа рынка был подобран аналогичный по мощности асинхронный двигатель АИР63А2ПУ3 со следующими параметрами.
Таблица 1. Основные технические данные двигателя АИР63А2ПУ3
При помощи модели прямого пуска параметры из таблицы 1 были проверены на соответствие паспортным данным двигателя (номинальная скорость вращения). Руководствуясь параметрами из таблицы 1, можно приступать к проектированию модели частотного преобразователя и его системы управления.
Структуру частотного преобразователя реализует модель, показанная на рисунке ниже.
В ее основе лежит векторная система управления, в которой отсутствуют датчики магнитного потока, используются только 2 датчика тока (на две фазы из трех) и датчик оборотов. Такая структура представляется оптимальным компромиссом для решаемой задачи, так как отказ от большего количества датчиков, замена их вычислительными блоками приведет к нестабильности из-за температурного дрейфа параметров в ходе длительной работы привода.
Система с полным набором датчиков, включая датчики магнитного потока, для данного применения не целесообразна по экономическим соображениям.
При моделировании на вход системы подается уставка по оборотам, представляющая собой наклонную линии от 500 до 3000 об/мин., переходящая затем в горизонтальную линию на уровне 3000 об/мин., момент на валу двигателя от 0 до 1,2 составляет половину от номинального значения, затем происходит нагружение до номинального момента.
Остальные параметры модели заданы при помощи скрипта, как показано на рисунке ниже.
Запуск модели и вывод графиков также осуществляется по команде из скрипта m-файла.
При использовании коэффициентов в обратных связях по умолчанию из литературы[2], получается резко колебательный характер при переходных режимах работы двигателя, как показано на рисунке ниже.
В ходе экспериментов на модели были подобраны другие коэффициенты, повышающие качество системы регулирования. График работы системы представлен на рисунке ниже.
В установившемся режиме работы двигателя при максимальном паспортном моменте обороты составляют 2684 об/мин., что на 46 об/мин. меньше номинального значения, это говорит о корректной работе регулятора.
Таким образом, в ходе проведенной экспериментальной работы на модели удалось провести настройку регулятора с хорошим качеством, далее можно приступать к моделированию системы слежения за вибрацией.
Список литературы
- Магидов, Р. Е. Разработка методики обучения системы вибродиагностики станочного электропривода / Р. Е. Магидов // Новые материалы, оборудование и технологии в промышленности: материалы Междунар. науч.-техн. конф. молодых ученых /М-во образования Респ. Беларусь, М-во науки и высш. образованияРос. Федерации, Белорус.-Рос. ун-т; редкол.: М. Е. Лустенков (гл. ред.)[и др.]. – Могилев: Белорус.-Рос. ун-т, 2023. – С. 131.
- Управление частотно-регулируемым электроприводом: Конспект лекций по курсу «Специальные разделы теории электропривода». /Данилов П.Е., Крутиков К.К., Рожков В.В. – 2-e изд., испр. – Смоленск, 2012. – 100 с.