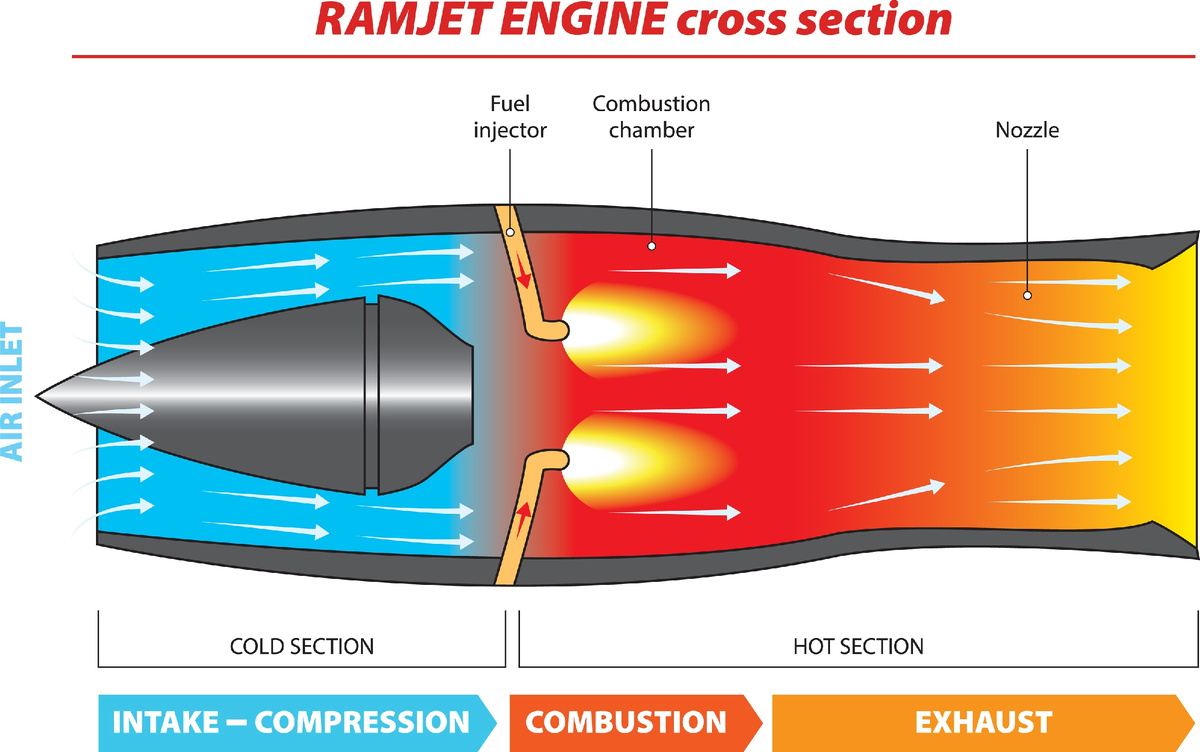
Создание систем управления для прямоточных воздушно-реактивных двигателей (ПВРД) — одна из наиболее сложных задач в аэрокосмической инженерии. В отличие от классических ракетных двигателей, ПВРД критически зависит от параметров набегающего потока воздуха. Эффективность сгорания жидкого топлива и устойчивость работы двигателя требуют мгновенной реакции автоматики на изменение числа Маха и высоты полета.
В этой статье мы рассмотрим процесс моделирования и создания контура управления подачей топлива для жидкостного ПВРД, используя среду Matlab и пакет Simulink.
1. Постановка задачи и физика процесса
Основная цель системы управления жидкостным ПВРД — поддержание оптимального состава топливовоздушной смеси (коэффициента избытка воздуха alpha) для обеспечения максимальной тяги или удельного импульса при сохранении устойчивого горения.
Сложность заключается в том, что массовый расход воздуха dm_air, поступающего в камеру сгорания, постоянно меняется в зависимости от скорости полета и плотности атмосферы. Задача САУ — регулировать массовый расход горючего dm_fuel так, чтобы соотношение компонентов оставалось в заданных пределах.
Ключевые переменные:
Входные возмущения: Число Маха M, Высота H, Угол атаки.
Управляющее воздействие: Положение клапана подачи топлива (дросселя).
Регулируемый параметр: Давление в камере сгорания или соотношение компонентов.
2. Архитектура модели в Simulink
Процесс разработки строится по принципу Model-Based Design (модельно-ориентированное проектирование). Мы разделяем систему на два основных уровня: Plant Model (Модель объекта/двигателя) и Controller (Система управления).
Моделирование объекта (Plant Model)
Объект моделируется как совокупность термодинамических подсистем. В Simulink это реализуется через библиотеку Simscape или стандартные блоки математических операций (Math Operations).
Входное устройство (Диффузор):
Здесь происходит торможение сверхзвукового потока. В модели используется блок Lookup Table (n-D), который хранит карту коэффициента восстановления полного давления sigma в зависимости от числа Маха. Это позволяет вычислить давление и температуру воздуха на входе в камеру сгорания.
Камера сгорания:
Это сердце модели. Здесь происходит вычисление тепловыделения. Мы используем уравнение теплового баланса, где повышение температуры торможения Delta T пропорционально расходу топлива и его теплотворной способности. Важно внедрить логику «срыва пламени»: если коэффициент alpha$ выходит за пределы воспламенения (слишком богатая или слишком бедная смесь), тяга должна падать до нуля.
Сопло:
Моделируется как сужающееся-расширяющееся сопло Лаваля. Используя изоэнтропические соотношения (реализованные через MATLAB Function blocks), рассчитывается скорость истечения газов и итоговая тяга.
Моделирование исполнительных механизмов
Реальный клапан подачи топлива не открывается мгновенно. Чтобы приблизить модель к реальности, в Simulink необходимо добавить динамику привода. Обычно используется блок Transfer Fcn (Передаточная функция) первого или второго порядка, описывающая инерционность насоса или клапана-дозатора.
3. Синтез системы управления (Controller)
Для управления жидкостным ПВРД чаще всего используется каскадная схема или адаптивное регулирование, так как параметры объекта сильно меняются в полете. Рассмотрим классический подход с использованием ПИД-регулятора с планированием коэффициентов (Gain Scheduling).
Логика работы контроллера:
Блок вычисления уставки (Set-point):
На основе текущих полетных данных (полученных от датчиков) бортовой компьютер рассчитывает требуемый расход топлива для поддержания стехиометрического соотношения или заданного режима тяги.
Датчики (Feedback):
В Simulink моделируется обратная связь. Мы берем выходные данные модели двигателя (например, реальное давление в камере) и добавляем к ним «шум» с помощью блока Band-Limited White Noise, чтобы имитировать реальные погрешности измерений.
ПИД-регулятор (PID Controller):
Блок PID Controller сравнивает требуемое значение давления/расхода с измеренным и вырабатывает сигнал ошибки.
Пропорциональная часть (P) отвечает за быструю реакцию.
Интегральная часть (I) устраняет статическую ошибку.
Дифференциальная часть (D) демпфирует перерегулирование.
Gain Scheduling:
Поскольку аэродинамика на высоте 1 км и 20 км кардинально отличается, фиксированные настройки ПИД-регулятора не будут работать эффективно везде. Мы используем блок PID Controller (2DOF) или внешнюю логику для изменения коэффициентов K_p, K_i, K_d в зависимости от числа Маха.
4. Виртуальные испытания и анализ
После сборки схемы в Simulink проводится серия симуляций.
Сценарий 1: Ступенчатое воздействие (Step Response)
Подается команда на резкое изменение тяги. Анализируется время переходного процесса и наличие перерегулирования (overshoot). Если система слишком колебательная, это может привести к помпажу воздухозаборника, что недопустимо.
Сценарий 2: Полет по траектории
В модель загружается профиль полета: набор высоты с разгоном. Система должна автоматически увеличивать подачу жидкого топлива при росте плотности воздуха и уменьшать ее при подъеме в стратосферу, удерживая заданную эффективность.
Используя Scope и Data Inspector, инженеры строят графики переходных процессов, анализируя устойчивость горения.
Заключение
Использование Matlab/Simulink для разработки САУ жидкостного прямоточного двигателя позволяет выявить критические проблемы еще до создания «железа». Возможность быстро перебирать конфигурации регуляторов и моделировать аварийные режимы (например, отказ датчика давления) существенно сокращает стоимость и сроки разработки перспективных двигательных установок.