Один изобретатель провел амбициозный эксперимент: он создал робота-взломщика, который может определять внутренние штифты в замке без использования камер. Вместо этого робот «чувствует» силу нажатия и использует для этого закон Гука.
В чем суть улучшения?
Предыдущие версии этого робота работали «в лоб»: они просто перебирали все возможные комбинации штифтов, и на это могла уйти целая неделя. Новая версия умнее и быстрее.
Как работает новый робот?
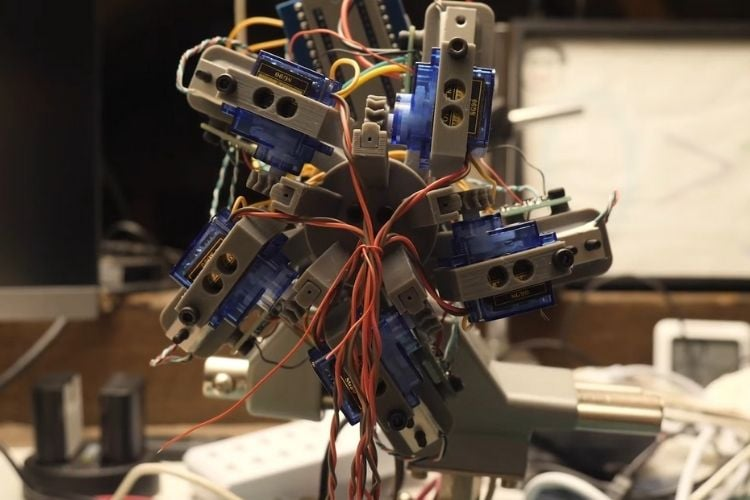
- Механика: Робот использует RC сервомоторы для быстрых движений. Каждый мотор установлен на тензодатчик – устройство, которое измеряет усилие.
- Процесс «ощупывания»: В замок вставляется проволока, которая надавливает на пружинки внутри. Эти пружинки сопротивляются, и тензодатчик записывает силу этого сопротивления.
- Физика (Закон Гука): Чем сильнее сжимается пружина, тем больше сила сопротивления. А длина штифта напрямую влияет на то, насколько пружина будет сжата. Таким образом, система пытается определить длину каждого штифта, основываясь на показаниях силы.
- Подача инструмента: Для точной подачи проволоки в замок используется реечная передача.
- Анализ данных: Микроконтроллер собирает данные о силе, а специальное программное обеспечение анализирует «силовой профиль» и классифицирует штифты.
Какие возникли проблемы?
Первые тесты с одним штифтом были успешными. Но когда систему масштабировали до пяти штифтов, проявились серьезные проблемы:
- Электрические помехи от сервомоторов.
- Механическое трение в системе.
- Нестабильные показания между разными гнездами для штифтов.
Как с этим боролись?
Изобретатель пробовал разные методы, включая алгоритмы кластеризации и методы усреднения, чтобы отфильтровать «зашумленные» данные.
Каков итоговый результат?
Робот смог достоверно определить длину штифтов только в одном конкретном гнезде (слот 3). С остальными четырьмя гнездами были серьезные проблемы с согласованностью измерений.
Однако, даже с этими ограничениями, робот сузил поле поиска: вместо 100 000 возможных комбинаций ему пришлось перебирать всего 243.
Хотя практическое применение этой модели пока ограничено, сам проект демонстрирует новый и невизуальный метод декодирования замка, основанный на простой физике и встроенных системах.
Ссылка на первоисточник: https://circuitdigest.com/news/a-robot-that-picks-locks-using-physics-not-sight
Вам также могут понравиться: