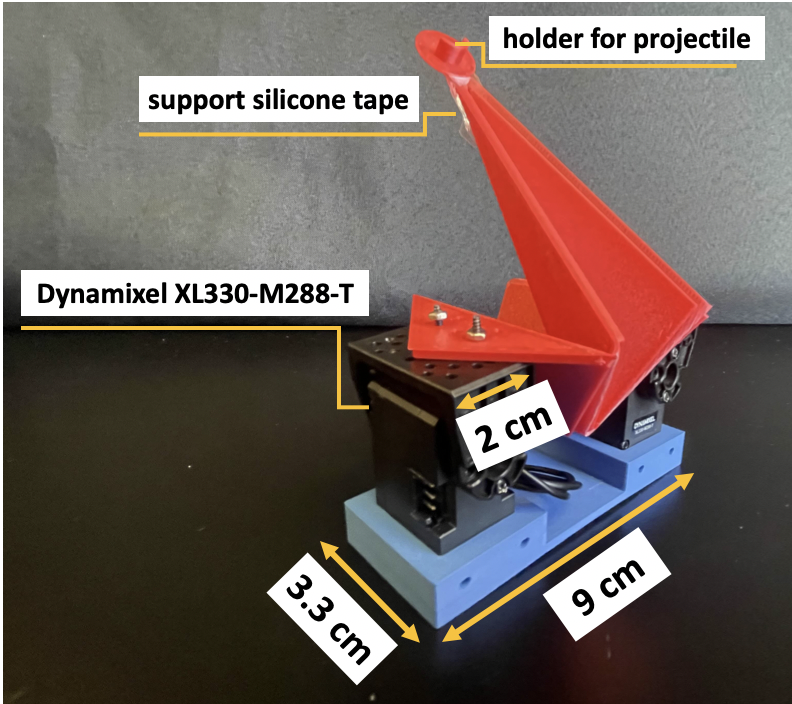
Исследователи из Carnegie Mellon University разработали фреймворк для симуляции оригами-механизмов с использованием MuJoCo. Систему применили для оптимизации оригами-катапульты через алгоритм CMA-ES. Оптимизированный дизайн с углом складки 115.5° и длиной руки 0.102 м достиг дистанции броска 0.570 м в реальных тестах.
Оригами-механизмы используются в биомедицинских устройствах, космической робототехнике и образовательных инструментах. Моделирование связи между паттерны складок (crease patterns), свойствами материалов и 3D-кинематикой требует решения задач в пространствах с высокой размерностью и нелинейными параметрами. Существующие методы зависят от специализированных forward models или аналитических приближений для конкретных морфологий.
Фреймворк представляет оригами-механизмы как графы связанных деформируемых панелей. Пользователи определяют паттерны складок через графический интерфейс, задают свойства материалов и параметры актуации. Система автоматически генерирует физически корректные модели MuJoCo из 2D-схем.
Оптимизация катапульты проводилась по двум параметрам: углу складки горной складки в диапазоне 100-226° и длине руки 0.08-0.18 м. Перебор 2880 комбинаций параметров выявил оптимальную зону с углами 110-130° и длиной руки 0.10-0.13 м. Три дизайна изготовили из PETG с толщиной граней 2 мм и толщиной складок 0.2 мм. Оптимизированная конфигурация сохранила превосходство в физических тестах над субоптимальными вариантами.
Источник новости и обложки: arxiv.org