Исследователи из Московского физико-технического института (МФТИ) разработали новую конструкцию ноги гуманоидного робота DecARt Leg, предназначенную для маневренной локомоции. Этот дизайн показал самый короткий достигаемый период переноса стопы (FAST) — всего 0.17 секунды. Это соответствует самой высокой теоретической скорости ходьбы в 4.18 м/с среди протестированных моделей.
Большинство современных гуманоидных роботов, таких как Unitree H1 и Fourier GR1, используют простую последовательную, или «связанную» (coupled), кинематическую структуру, в которой задействованы все актуаторы. Хотя существуют эффективные декаплированные (decoupled) дизайны, например, у роботов Cassie/Digit, их пантографная структура не похожа на человеческую. Разработчики поставили цель создать ногу, которая визуально близка к человеческой морфологии, но при этом сохраняет потенциал декаплированной актуации. DecARt Leg достигает этого, используя квази-телескопическую кинематическую структуру с антропоморфным внешним видом и коленом, направленным вперед.
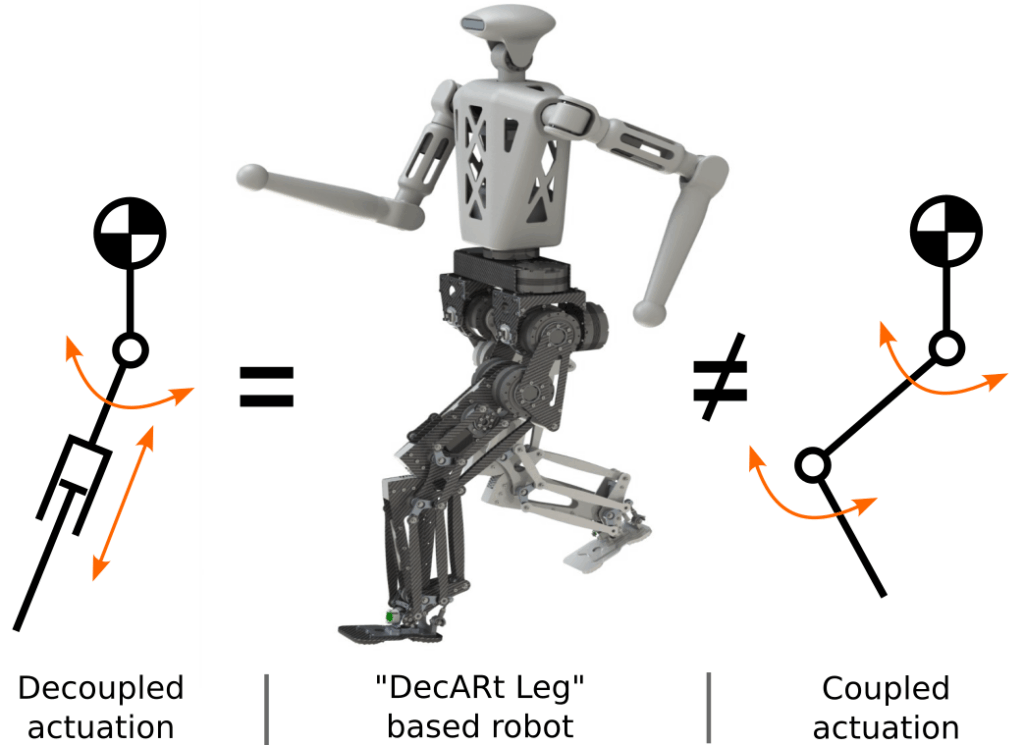
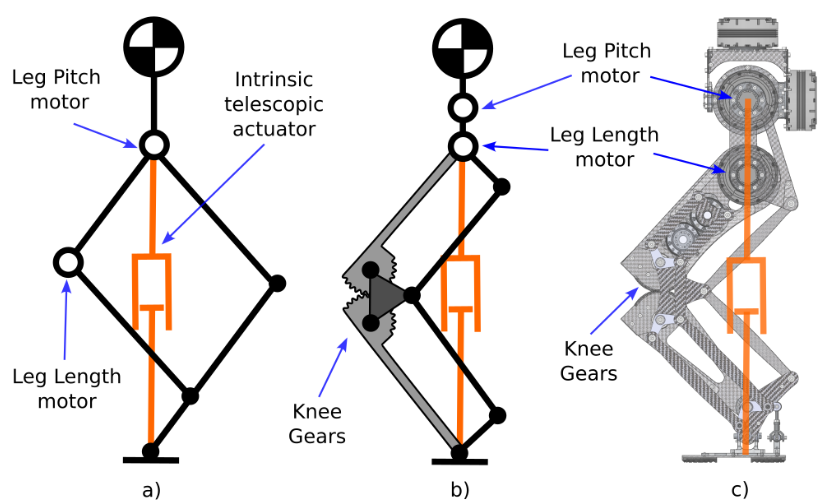
Дизайн DecARt Leg соответствует принципам маневренной локомоции: все актуаторы, включая те, что предназначены для полностью актуализированного 2-DoF голеностопа, размещены около «корня» ноги для минимизации инерции замаха. Использование проприоцептивных ротационных актуаторов, как в других гуманоидах, обеспечивает простоту моделирования и контроля. Ключевая особенность, позволяющая имитировать телескопическую структуру, — это компактная пантографная структура с редукторным коленом, которая использует комбинацию пассивных шестерен и 4-звенного параллельного механизма. Благодаря этому ротация мотора, отвечающего за длину ноги, напрямую преобразуется в линейное вертикальное движение стопы, не задействуя мотор, отвечающий за тангаж ноги. Для оценки маневренности авторы предложили новый дескриптивный бенчмарк — «Fastest Achievable Swing Time» (FAST).
Численное сравнение показало, что DecARt Leg (0.17 с) превосходит Cassie (0.24 с) и Fourier GR1T2 (0.24 с) по метрике FAST. Для оценки важности декаплированной актуации была протестирована серийная версия DecARt-S: минимальное время замаха ухудшилось с 0.17 до 0.25 секунды при тех же ограничениях мотора. Обширная симуляция, проведенная с роботом DecARt Leg общим весом 35 кг, подтвердила потенциал дизайна. Робот достиг максимальной скорости ходьбы 2.2 м/с на ровной поверхности и выдержал толчок силой до 95 Н в сагиттальной плоскости.
Источник новости и обложки: arxiv.org