CAN‑FD (Controller Area Network Flexible Data‑Rate) — эволюционное развитие классического протокола CAN, предназначенное для увеличения пропускной способности и объёма передаваемых данных при сохранении совместимости с существующей инфраструктурой. Ключевое отличие: гибкая скорость передачи — разные скорости для заголовка (арбитража) и поля данных. Причины разработки: Формат кадра CAN‑FD (отличия от CAN 2.0): Механизм переключения скоростей:
Лекция: шина CAN‑FD (Controller Area Network Flexible Data‑Rate)
1. Введение
CAN‑FD (Controller Area Network Flexible Data‑Rate) — эволюционное развитие классического протокола CAN, предназначенное для увеличения пропускной способности и объёма передаваемых данных при сохранении совместимости с существующей инфраструктурой.
Ключевое отличие: гибкая скорость передачи — разные скорости для заголовка (арбитража) и поля данных.
2. История создания
- 2012 г. — компания Bosch анонсирует стандарт CAN‑FD как ответ на растущие требования к пропускной способности в автомобилях (ADAS, камеры, радары).
- 2015 г. — официальная публикация стандарта ISO 11898‑1:2015, включающего CAN‑FD.
- 2016–2018 гг. — внедрение в серийные автомобили премиум‑класса (BMW, Mercedes, Audi, Tesla).
- 2020‑е гг. — массовое распространение в электромобилях и системах автономного вождения.
Причины разработки:
- нехватка пропускной способности классического CAN (макс. 1 Мбит/с);
- рост объёма данных от датчиков (камеры, лидары, радары);
- потребность в быстрой передаче телеметрии и управляющих сигналов;
- сохранение обратной совместимости с CAN 2.0.
3. Сферы применения
Автомобильная промышленность
- Системы ADAS (Advanced Driver‑Assistance Systems):
камеры кругового обзора;
радары миллиметрового диапазона;
лидары;
системы экстренного торможения. - Электромобили:
мониторинг батарей (BMS);
управление силовыми инверторами;
диагностика силовых цепей. - Бортовые сети:
цифровая приборная панель;
мультимедийные системы;
шлюзы между доменами (chassis, powertrain, infotainment).
Промышленность и спецтехника
- робототехника (коллаборативные роботы);
- авиационные бортовые системы;
- медицинское оборудование (КТ, МРТ);
- сельскохозяйственная техника (автопилоты для тракторов);
- горнодобывающее оборудование.
4. Технические характеристики
- Скорость передачи:
фаза арбитража (заголовок): до 1 Мбит/с (как в CAN 2.0);
фаза данных: до 12 Мбит/с (в 12 раз быстрее). - Объём данных в кадре: до 64 байт (против 8 байт в CAN 2.0).
- Длина кабеля:
до 40 м при 12 Мбит/с;
до 500 м при 500 кбит/с. - Количество узлов: до 127 (как в CAN).
- Топология: общая шина с терминальными резисторами 120 Ом.
- Контроль ошибок:
CRC‑17 для кадров ≤16 байт;
CRC‑21 для кадров >16 байт.
5. Архитектура и принцип работы
Физический уровень
- дифференциальная пара CAN_H / CAN_L;
- терминальные резисторы 120 Ом на концах шины;
- совместимость с CAN‑трансиверами (но для CAN‑FD нужны ускоренные трансиверы).
Канальный уровень
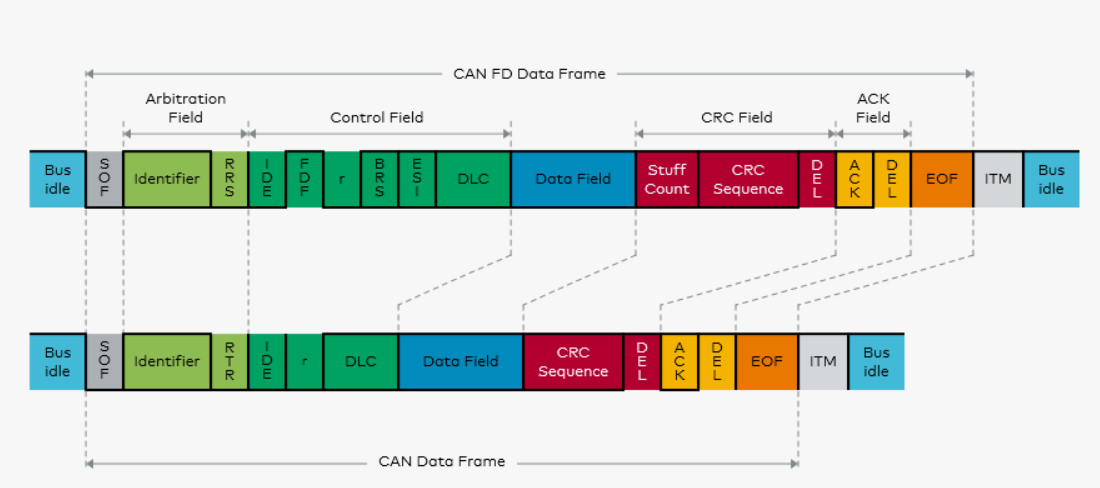
Формат кадра CAN‑FD (отличия от CAN 2.0):
- SOF (Start of Frame) — как в CAN.
- Арбитражное поле (11/29 бит ID) — передаётся на низкой скорости (≤1 Мбит/с).
- Контрольная секция (включая DLC — длину данных).
- Поле данных (до 64 байт) — передаётся на высокой скорости (до 12 Мбит/с).
- CRC (17 или 21 бит) — увеличенный размер для длинных кадров.
- ACK и EOF — как в CAN.
Механизм переключения скоростей:
- Ведущий отправляет заголовок на скорости 1 Мбит/с.
- После арбитража скорость автоматически повышается до N Мбит/с (задаётся конфигурацией).
- Данные передаются на высокой скорости.
- После приёма данных скорость возвращается к 1 Мбит/с для ACK/EOF.
Обратная совместимость
- CAN‑FD контроллеры принимают кадры CAN 2.0;
- CAN 2.0 контроллеры не видят кадры CAN‑FD (игнорируют их).
6. Преимущества CAN‑FD
- Высокая пропускная способность:
в 10–12 раз выше, чем у CAN 2.0;
возможность передавать большие пакеты (64 байт). - Сохранение инфраструктуры:
та же топология «общая шина»;
те же разъёмы и кабели (но нужны быстрые трансиверы). - Реальное время:
детерминированная задержка для критических сообщений;
приоритезация через ID (как в CAN). - Надёжность:
дифференциальная передача;
усиленный CRC (17/21 бит);
автоматическое повторение при ошибке. - Гибкость:
настройка скорости передачи данных (от 1 до 12 Мбит/с);
совместимость с CAN 2.0 узлами.
7. Недостатки CAN‑FD
- Стоимость:
ускоренные трансиверы дороже CAN 2.0;
необходимость обновления ПО контроллеров. - Сложность отладки:
две скорости в одном кадре требуют осциллографов с высокой частотой дискретизации;
анализ трафика сложнее, чем в CAN 2.0. - Ограниченная длина линии при высоких скоростях:
40 м при 12 Мбит/с;
требуется тщательный расчёт волнового сопротивления. - Обратная совместимость:
CAN 2.0 узлы «не видят» CAN‑FD кадры;
смешанные сети требуют шлюзов. - Энергопотребление:
высокие скорости увеличивают потребление трансиверов.
8. Методы диагностики CAN‑FD
1. Визуальный осмотр
- проверка терминальных резисторов (120 Ом);
- целостность экранированной витой пары;
- качество разъёмов (отсутствие окислов).
2. Измерение физических параметров
- Сопротивление шины: 60 Ом между CAN_H и CAN_L (два резистора 120 Ом параллельно).
- Напряжение:
рецессивное: CAN_H ≈ CAN_L ≈ 2,5 В;
доминантное: CAN_H ≈ 3,5 В, CAN_L ≈ 1,5 В. - Волновое сопротивление: 120 Ом ±10 %.
3. Анализ сигналов осциллографом
- Требования к осциллографу:
полоса пропускания ≥500 МГц;
частота дискретизации ≥2 ГГц. - Что проверять:
форму сигналов на этапах арбитража и передачи данных;
длительность битового интервала (должна соответствовать скорости);
отражения и помехи (особенно на переходах скоростей).
4. Программная диагностика
- Специализированные анализаторы:
Vector CANoe/CANalyzer;
Kvaser CAN Herald;
PCAN‑View. - Что анализировать:
статистику ошибок (TEC/REC);
распределение скоростей (арбитраж vs данные);
длину кадров (0–64 байт);
CRC‑ошибки.
5. Встроенные механизмы самодиагностики
- счётчики ошибок передачи/приёма;
- автоматический переход в «пассивный» режим;
- сигнализация о перегрузке шины.
6. Типовые неисправности
- Несовместимость скоростей: узлы не видят кадры из‑за разной настройки скорости данных.
- Отражения сигнала: неправильная терминация или длина линии.
- Ошибки CRC: помехи на этапе передачи данных (высокая скорость).
- Конфликты ID: дублирование идентификаторов в смешанной сети (CAN 2.0 + CAN‑FD).
- Перегрузка шины: превышение лимита в 127 узлов.
9. Инструменты диагностики
- Осциллограф (полоса ≥500 МГц) — анализ формы сигналов.
- Мультиметр — измерение сопротивления и напряжения.
- CAN‑FD интерфейс (USB/PCI) — захват трафика.
- ПО для анализа:
Vector CANoe (поддержка CAN‑FD);
Wireshark + плагин CAN;
INCA от ETK. - Тестовые генераторы — имитация узлов