CAN (Controller Area Network) — это стандарт последовательной связи для объединения в сеть электронных устройств, обеспечивающий надёжную передачу данных в условиях сильных электромагнитных помех. Ключевые мотивы разработки: Формат кадра: Механизм арбитража:
Лекция: шина CAN (Controller Area Network)
1. Введение
CAN (Controller Area Network) — это стандарт последовательной связи для объединения в сеть электронных устройств, обеспечивающий надёжную передачу данных в условиях сильных электромагнитных помех.
2. История создания
- 1983 г. — компания Bosch начинает разработку протокола для автомобильной промышленности.
- 1986 г. — официальная презентация CAN на конгрессе SAE (Society of Automotive Engineers).
- 1987 г. — Intel выпускает первый CAN‑контроллер (82526).
- 1991 г. — стандарт CAN 2.0 (разделение на части A и B).
- 1993 г. — принятие ISO 11898 как международного стандарта.
- 2000‑е гг. — развитие CAN FD (Flexible Data‑rate) для увеличения пропускной способности.
Ключевые мотивы разработки:
- необходимость заменить громоздкие проводные соединения в автомобилях;
- требование высокой надёжности в условиях электромагнитных помех;
- потребность в децентрализованной архитектуре (отсутствие главного контроллера).
3. Сферы применения
Основное применение
- Автомобильная промышленность:
управление двигателем;
системы безопасности (ABS, ESP);
бортовые сети комфорта;
приборные панели;
телематика. - Промышленная автоматизация:
станки и роботы;
конвейерные линии;
системы управления зданиями. - Медицинское оборудование:
аппараты ИВЛ;
диагностические комплексы;
инфузионные системы.
Другие области
- железнодорожный транспорт;
- сельскохозяйственная техника;
- морские суда;
- аэрокосмическая отрасль;
- умные дома.
4. Технические характеристики
- Скорость передачи: от 10 кбит/с до 1 Мбит/с (стандарт), до 5 Мбит/с (CAN FD);
- Максимальная длина линии: до 1 км (при 50 кбит/с), до 40 м (при 1 Мбит/с);
- Количество узлов: до 127 (теоретически), обычно 32–64;
- Топология: общая шина с терминальными резисторами (120 Ом);
- Разрядность данных: 0–8 байт в стандартном кадре;
- Контроль ошибок: CRC, контроль битовых полей, подтверждение приёма.
5. Архитектура и принцип работы
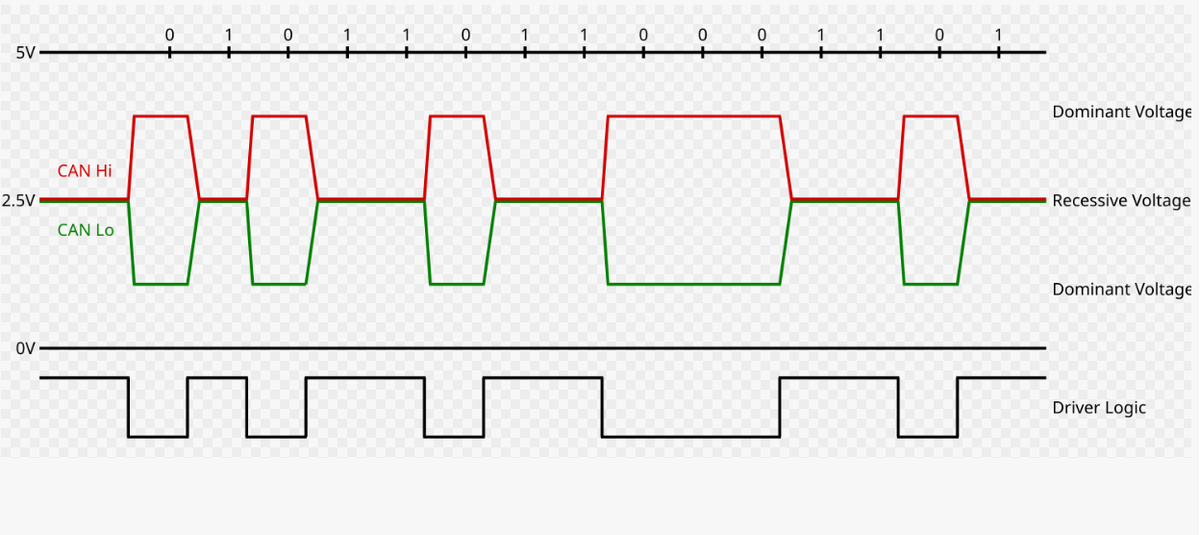
Физический уровень
- двухпроводная дифференциальная линия (CAN_H, CAN_L);
- доминирующее состояние (логический «0») — разница потенциалов ~2 В;
- рецессивное состояние (логическая «1») — разница потенциалов ~0 В;
- терминальные резисторы 120 Ом на концах шины.
Канальный уровень
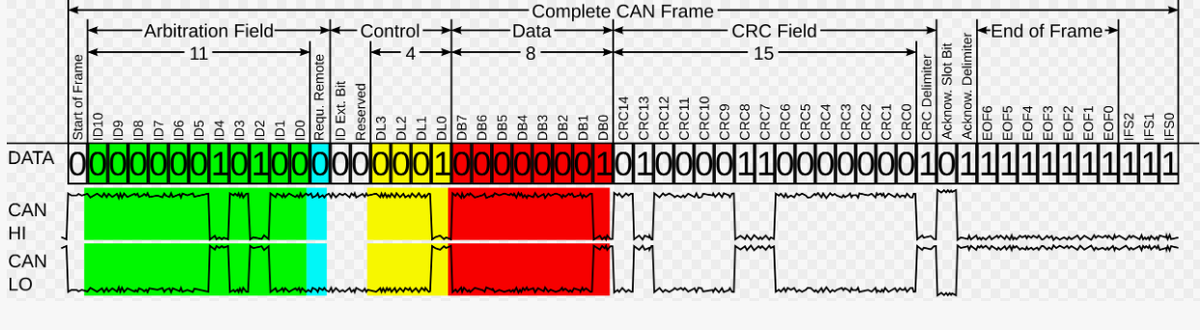
Формат кадра:
- Начало кадра (SOF);
- Идентификатор (11 или 29 бит);
- Контроль доступа;
- Длина данных (0–8 байт);
- Данные;
- CRC (15 бит);
- Подтверждение (ACK);
- Конец кадра (EOF).
Механизм арбитража:
- узлы «слушают» линию при передаче;
- при коллизии продолжает передачу узел с меньшим идентификатором;
- гарантирует доставку высокоприоритетных сообщений.
6. Преимущества CAN
- Надёжность:
дифференциальная передача сигналов;
встроенный контроль ошибок (CRC, битовый контроль);
автоматическое повторение при ошибке. - Реальное время:
детерминированная задержка доставки;
приоритезация сообщений через идентификатор. - Экономичность:
минимум проводных соединений;
низкая стоимость компонентов. - Масштабируемость:
лёгкое добавление новых узлов;
отсутствие перенастройки сети. - Устойчивость:
работа при сильных электромагнитных помехах;
отказоустойчивость (отключение неисправных узлов).
7. Недостатки CAN
- Ограниченная пропускная способность:
максимум 1 Мбит/с в классическом CAN;
малый объём данных в кадре (до 8 байт). - Сложность диагностики:
необходимость специализированного оборудования;
трудности локализации неисправностей. - Ограниченное число узлов:
практические ограничения при большом количестве устройств. - Жёсткие требования к топологии:
строго «общая шина»;
точное соблюдение длины линий и терминации. - Высокая стоимость разработки:
требуется глубокое понимание протокола;
затраты на сертификацию.
8. Методы диагностики CAN‑сети
1. Визуальный осмотр
- проверка целостности кабелей;
- контроль подключения терминальных резисторов (120 Ом);
- осмотр разъёмов на наличие окислов.
2. Измерение физических параметров
- Сопротивление шины: между CAN_H и CAN_L должно быть ~60 Ом (два резистора 120 Ом параллельно);
- Напряжение:
рецессивное состояние: CAN_H ≈ 2,5 В, CAN_L ≈ 2,5 В;
доминирующее состояние: CAN_H ≈ 3,5 В, CAN_L ≈ 1,5 В; - Волновое сопротивление: должно быть 120 Ом ±10 %.
3. Анализ сигналов осциллографом
- форма сигналов CAN_H и CAN_L;
- длительность битового интервала;
- амплитуда дифференциального сигнала (должно быть ~2 В);
- наличие помех и отражений.
4. Программная диагностика
- CAN‑анализаторы (например, CANalyzer, CANoe):
захват и декодирование кадров;
статистика ошибок;
симуляция узлов. - Логирование трафика:
выявление «молчащих» узлов;
анализ частоты сообщений;
поиск коллизий.
5. Встроенные механизмы самодиагностики
- счётчики ошибок передачи (TEC) и приёма (REC);
- автоматический переход в «пассивный» режим при критических ошибках;
- сигнализация о перегрузке шины.
6. Типовые неисправности и их признаки
- Обрыв линии: отсутствие трафика, высокое сопротивление (>240 Ом);
- Короткое замыкание: нулевое дифференциальное напряжение;
- Неправильная терминация: отражения сигнала, ошибки CRC;
- Конфликт идентификаторов: потеря сообщений, высокие счётчики ошибок;
- Перегрузка шины: задержки, пропущенные кадры.
9. Инструменты диагностики
- Осциллограф — анализ формы сигналов;
- Мультиметр — измерение сопротивления и напряжения;
- CAN‑интерфейс (USB‑CAN, PCI‑CAN) — захват трафика;
- Специализированное ПО (CANalyzer, Wireshark с плагином CAN);
- Тестовые генераторы CAN — имитация узлов и нагрузок.
10. Практические рекомендации
- При проектировании:
соблюдайте максимальную длину линии для заданной скорости;
устанавливайте терминальные резисторы на обоих концах;
используйте экранированную витую пару (STP). - При монтаже:
избегайте резких изгибов кабеля;
обеспечивайте надёжный контакт разъёмов;
разделяйте CAN‑линию и силовые цепи. - При диагностике:
начинайте с измерения сопротивления шины;
проверяйте напряжение в рецессивном и доминирующем состояниях;
анализируйте трафик с помощью CAN‑анализатора.