LIN (Local Interconnect Network) — это недорогой последовательный протокол связи, разработанный для создания дешёвых локальных сетей обмена данными в автомобильных системах и промышленной автоматике. Ключевые особенности: Области применения: Сеть LIN состоит из: Используется топология «общая шина»: Кадр LIN состоит из: Типы кадров: Ведущий работает по жёсткому расписанию: Преимущества: Недостатки: Основные документы: Версии: Сценарий: управление стеклоподъёмником.
Лекция: шина LIN (Local Interconnect Network) в системах цифровой передачи данных
1. Введение и область применения
LIN (Local Interconnect Network) — это недорогой последовательный протокол связи, разработанный для создания дешёвых локальных сетей обмена данными в автомобильных системах и промышленной автоматике.
Ключевые особенности:
- однопроводная линия передачи (экономия на кабеле);
- низкая скорость передачи (до 20 кбит/с);
- невысокая стоимость реализации;
- поддержка топологии «общая шина»;
- централизованное управление (ведущий‑ведомый).
Области применения:
- управление стеклоподъёмниками, зеркалами, замками;
- системы климат‑контроля;
- датчики положения и концевые выключатели;
- осветительные системы автомобиля;
- промышленная автоматика с невысокими требованиями к скорости.
2. Архитектура и топология сети
Структура сети
Сеть LIN состоит из:
- одного ведущего узла (Master) — инициирует передачу, управляет расписанием;
- до 15 ведомых узлов (Slave) — отвечают на запросы ведущего.
Топология
Используется топология «общая шина»:
- единый физический канал связи;
- все узлы подключены параллельно;
- терминальные резисторы на концах линии (обычно 1 кОм).
3. Физический уровень
Характеристики
- Напряжение питания: 12 В (автомобильное исполнение);
- Уровень сигналов:
логическая «1» (рецессивное состояние): ~12 В;
логический «0» (доминантное состояние): ~0 В;

- Скорость передачи: настраиваемая, стандартно 9{,}6 кбит/с, 19{,}2 кбит/с;
- Длина линии: до 40 м (зависит от скорости и нагрузки).
Линия связи
- один сигнальный провод + масса;
- защита от помех: фильтрация, экранирование (при необходимости);
- допустимые перепады напряжения: ±25 В (устойчивость к автомобильным помехам).
4. Канальный уровень (протокол)
Формат кадра
Кадр LIN состоит из:
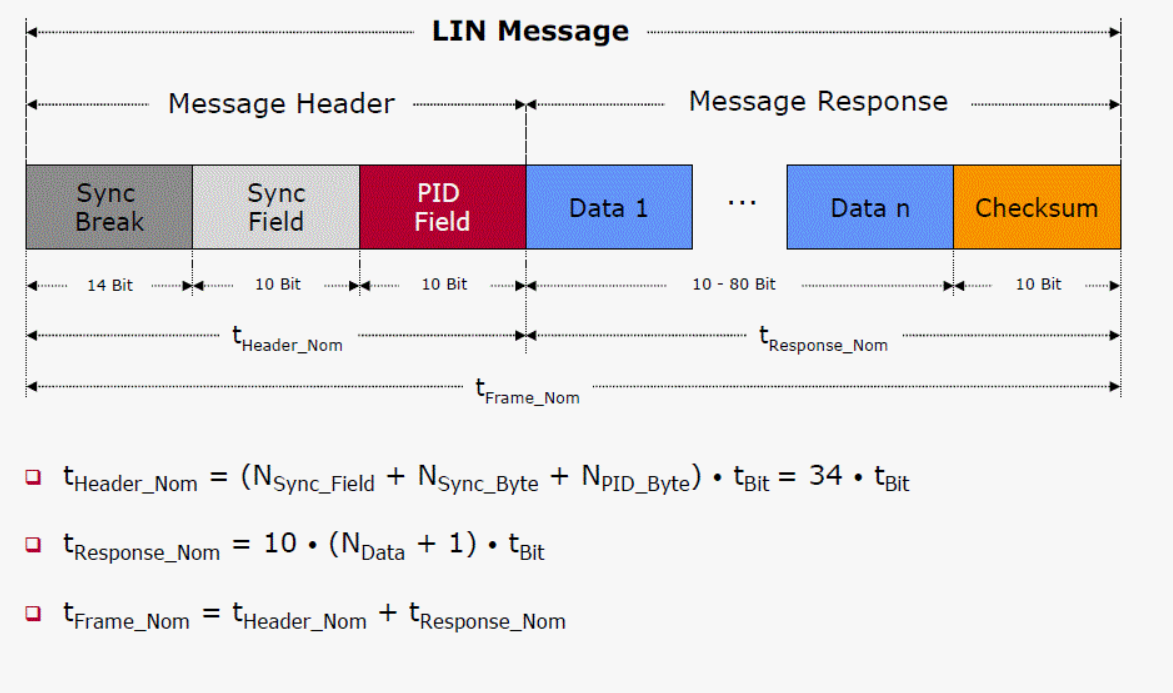
- Синхропоследовательность (Break) — сигнал начала кадра;
- Синхробайт (Sync) — для синхронизации приёмников;
- Идентификатор кадра (PID) — 6 бит данных + 2 бита контроля;
- Данные — от 0 до 8 байт;
- Контрольная сумма (CRC) — 8‑битная.
Идентификатор кадра (PID)
- биты 0–5: тип сообщения (64 возможных);
- биты 6–7: контрольная сумма идентификатора.
Типы кадров:
- Заголовок — отправляет ведущий;
- Ответ — отправляют ведомые.
5. Принцип работы
Цикл обмена
- Ведущий отправляет заголовок (ID + синхробайты).
- Ведомые анализируют ID:
если ID предназначен им — готовят ответ;
иначе — игнорируют. - Ведущий ожидает ответ от ведомого.
- Ведомый отправляет данные (если запрошен).
- Ведущий проверяет CRC и обрабатывает данные.
Расписание (Scheduling)
Ведущий работает по жёсткому расписанию:
- циклический опрос узлов;
- фиксированные интервалы между кадрами;
- приоритезация важных сообщений.
6. Особенности протокола
Управление ошибками
- CRC‑8 для проверки целостности данных;
- повторная передача при ошибке (на уровне приложения);
- обнаружение коллизий (ведущий контролирует линию).
Энергосбережение
- режим «сна» (Sleep Mode) — низкое потребление;
- пробуждение по сигналу (Wake‑up Frame).
Совместимость
- обратная совместимость с более ранними версиями LIN;
- интеграция с CAN‑сетями через мосты.
7. Преимущества и недостатки
Преимущества:
- низкая стоимость компонентов;
- простота реализации;
- надёжность в автомобильных условиях;
- стандартизация (ISO 17987);
- лёгкость диагностики.
Недостатки:
- низкая скорость передачи;
- ограничение по числу узлов (16 макс.);
- централизованное управление (зависимость от ведущего);
- отсутствие горячей замены узлов.
8. Стандарты и спецификации
Основные документы:
- ISO 17987 — международный стандарт LIN;
- LIN Specification Package — детализация от LIN Consortium;
- SAE J2602 — американский стандарт для LIN.
Версии:
- LIN 1.x (устаревшие);
- LIN 2.0 — актуальная базовая версия;
- LIN 2.1, 2.2 — дополнения и уточнения.
9. Пример реализации
Сценарий: управление стеклоподъёмником.
- Ведущий (центральный блок) отправляет кадр с ID = 0x12.
- Ведомый (блок стеклоподъёмника) распознаёт ID и готовит статус.
- Ведомый отправляет 2 байта: положение (0–100 %) и статус двигателя.
- Ведущий проверяет CRC и обновляет интерфейс водителя.