Аннотация
В статье представлена разработка и моделирование позиционной системы автоматического регулирования для управления поворотом антенной установки. Система построена по принципу подчиненного регулирования и включает в себя три контура: контур положения (внешний), контур скорости (внутренний) и модель исполнительного устройства – двигателя постоянного тока (ДПТ). Результаты моделирования подтвердили корректность расчетов: переходные характеристики контуров скорости и положения показали значения времени нарастания, времени регулирования и перерегулирования, близкие к расчетным. Настройка регуляторов признана успешной, что демонстрирует работоспособность предложенной многоконтурной системы позиционирования.

Аналитический расчет
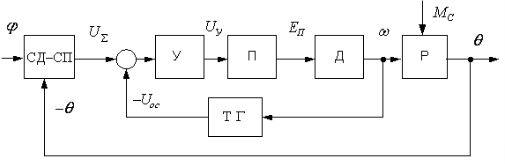
Данная следящая система используется для поворота антенны при изменении входного угла поворота. Установка приводится в движение через понижающий редуктор (Р) двигателем (Д). Для создания требуемого напряжения двигателя используется усилитель и сравнивающее устройство, в которых сравнивается сигнал задания U_∑ и сигнал с тахогенератора (ТГ).
Сигнал U_∑ вырабатывается измерительной схемой на сельсинах СД-СП, работающих в трансформаторном режиме. Сельсин-приемник жестко связан с выходной осью Р. А ось СД является задающей (Рисунок 1).
Ранее был рассмотрен скоростной следящий электропривод, в котором внешним контуром является контур скорости. При разработке данной системы слежения важным отличием является присутствие третьего контура – контура угла.
Параметры двигателя:
- P_ном = 2,5 кВт - номинальная мощность;
- U_ном = 220 В – номинальное напряжение якоря ДПТ;
- I_ном = 12 А – номинальный ток;
- n_ном = 1500 об/мин, w_ном = 157,07 рад/с - номинальная частота вращения и угловая скорость;
- J = 0,5 кг*м^2 – момент инерции вала ДПТ;
- L_я = 0,018 Гн – индуктивность обмотки якоря;
- R_я = 1,36 Ом - сопротивление обмотки якоря;
- K_e = (U_ном - R_я*I_ном)/w_ном = 1,3 В*с/рад - коэффициент противо-ЭДС, где a = 1,25 - коэффициент нагревания обмотки;
- K_м = P_ном/(w_ном * I_ном) = 1,3 Н*м/А;
- T_эм = L_я/R_я = 0,013 с - постоянная времени электромагнитной части ДПТ;
- T_м = (J*R_я)/(C_м*С_e) = 0,402 с - постоянная времени электромагнитной части ДПТ.
Разработка модели
Разработка простейшей позиционной системы состоит из следующих этапов:
- Разработка динамической модели ДПТ;
- Разработка системы регулирования по скорости, настройка контура по скорости;
- Разработка систем регулирования положения, настройка контура положения.
Так как ранее уже были построены модели ДПТ и контур скорости. Большая часть расчетов будет пропущена, однако стоит отметить следующие отличия от предыдущих моделей:
- В качестве датчика обратной связи используется тахогенератор;
- Подчиненное управление осуществляется двумя контурами – скорости и положения, настроенными на технический и симметричный оптимум соответственно.
1. Модель ДПТ:
2. Контур скорости, настройка на технический оптимум
Настраивается контур скорости на технический оптимум, так как является внутренним контуром управления. ПИ-регулятор контура скорости имеет передаточную функцию:
Значения параметров системы регулирования принимаются следующими:
Перерегулирование :
Время нарастания:
Отклонения допустимые, далее проводится настройка контура положения.
3. Контур положения, настройка на симметричный оптимум
Структурная схема системы позиционирования, основанная на выше синтезированной структурной схеме системы стабилизации скорости, представлена на рисунке 7. Дополнительно в контур положения устанавливается звено интегрирования, так как угловая скорость w является производной угла Ө, датчик положения (K_дп = 6/3,14 = 1,909, T_дп = 0,001 с), редуктор с i =100.
Контур скорости возможно представить в виде звеном первого порядка с постоянной времени 2Tкс.
Разомкнутая система управления примет вид:
ПИ-регулятор контура скорости имеет передаточную функцию:
постоянная времени РП:
При 6 В на пульте управления (задание) выходной угол получается 3,139 радиан (≈ 180°). Далее проводится анализ переходных характеристик.
Время нарастания t_н:
Измеренное значение составляет t_н/изм = 0,095 сек. А расчетное при настройке на СО t_н = 3,1 *T(кп)_u = 0,104 с. Отклонение незначительное и составило Δt_н = 0,009 с.
Время регулирования t_p:
Измеренное значение составляет t_p/изм = 0,311 сек. А расчетное при настройке на СО t_p = 12 * T(кп)_u = 0,39. Отклонение составило Δt_p = 0,07 с.
Перерегулирование :
Заметное небольшое перерегулирование, значение приблизительно соответствует стандартному значению при настройке на СО. Cинтез регуляторов проведен успешно.