
Математическое моделирование лопасти вертолета – это сложный, но критически важный процесс в авиационной инженерии, позволяющий анализировать и предсказывать аэродинамическое и динамическое поведение несущего винта. Среда Matlab (Matrix Laboratory) с ее мощными инструментами для численных расчетов и визуализации является идеальной платформой для реализации таких моделей.
1. Основа моделирования: уравнения движения лопасти
Моделирование лопасти несущего винта (НВ) базируется на уравнениях, описывающих ее движение. Лопасть вертолета совершает сложное движение, сочетающее вращение вокруг оси вала НВ и колебательное движение (маховое, плоскостное и крутильное) относительно втулки.
Основные допущения и модель:
лопасть как балка: чаще всего лопасть рассматривается как упругая балка переменного сечения, закрепленная на втулке.
Степени свободы: модель может включать:
Маховое движение (beta): Колебания лопасти "вверх-вниз" (из плоскости вращения).
Плоскостное движение (zeta): колебания лопасти "вперед-назад" (в плоскости вращения).
Крутильное движение (phi): поворот сечения лопасти вокруг собственной продольной оси.
Уравнения: используются дифференциальные уравнения движения, выведенные, как правило, из уравнений Лагранжа второго рода или метода конечных элементов (МКЭ). Они связывают инерционные силы, аэродинамические нагрузки, силы упругости и демпфирования.
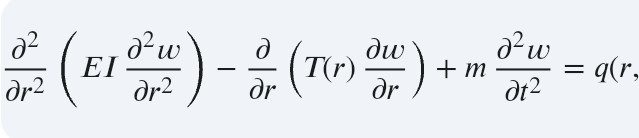
Где w — прогиб лопасти, EI — изгибная жесткость, T — центробежная сила натяжения, m — погонная масса, q — погонная аэродинамическая нагрузка. (Это упрощенный вид для изгиба, полная система включает все степени свободы).
3. Реализация модели в Matlab
Matlab предоставляет необходимые инструменты для решения такой системы уравнений.
А. Численное решение
ODE-солверы (Обыкновенные дифференциальные уравнения): Для решения системы нелинейных дифференциальных уравнений во времени (если используется дискретная модель с конечным числом степеней свободы) применяются функции ode45, ode15s и др.
МКЭ (Метод конечных элементов): Для сложных моделей с распределенными параметрами (балка) используется дискретизация лопасти на конечные элементы. Matlab может работать с матрицами жесткости, масс и демпфирования.
Б. Структура кода (типовая)
Задание исходных данных: Определение геометрических (длина, хорда, крутка), массовых (погонная масса, момент инерции) и упругих (жесткость) характеристик лопасти.
Функция аэродинамики: функция для расчета погонных аэродинамических сил в зависимости от радиальной координаты (r) и азимута (psi).
Функция правых частей (для ODE): Определение функции, которая возвращает производные от переменных состояния (углы и скорости d{beta}, \dd{beta}, d{zeta}, dd{zeta} и т.д.) на основе текущих значений и аэродинамических сил.
Интегрирование: вызов решателя, например, [t, X] = ode45(@ode_function, tspan, X0).
Постобработка и визуализация: анализ полученных данных (X):
построение графиков махового угла (beta) в зависимости от азимута (psi).
Расчет интегральных характеристик: тяги (T) и крутящего момента (Q) НВ.
Визуализация формы деформации лопасти.
В. Использование специализированных тулбоксов
Для более продвинутого анализа часто используются дополнительные тулбоксы Matlab:
Simulink: Для создания блочных диаграмм, моделирования систем управления и связывания динамики лопасти с динамикой всего вертолета.
Partial Differential Equation (PDE) Toolbox: Для решения уравнений с частными производными, которые могут возникать в более детальных МКЭ моделях.
4. Значение и применение моделирования
Проектирование: оптимизация геометрических параметров лопасти (крутка, форма профиля, жесткость) для достижения максимальной эффективности и снижения вибраций.
Динамический анализ: исследование резонансов и устойчивости лопасти, например, флаттера.
Анализ нагрузок: определение переменных аэродинамических и инерционных нагрузок для оценки усталостной прочности.
Создание тренажеров: разработка высокоточных математических моделей для вертолетных тренажеров.
Математическое моделирование лопасти вертолета в Matlab — это мощный инструмент, который позволяет инженерам проводить виртуальные эксперименты, существенно сокращая время и стоимость разработки.