Прогнозирующее инверсное нейроуправление (ПИНУ) — это мощный подход в области адаптивного управления, сочетающий в себе достоинства нейронных сетей для моделирования и инвертирования динамики системы с принципами прогнозирующего управления (Model Predictive Control, MPC). Его ключевая идея заключается в использовании нейросетевого контроллера, который обучен генерировать управляющее воздействие, необходимое для достижения желаемого состояния объекта, и при этом учитывает будущее поведение системы на определенный временной интервал — горизонт прогноза.
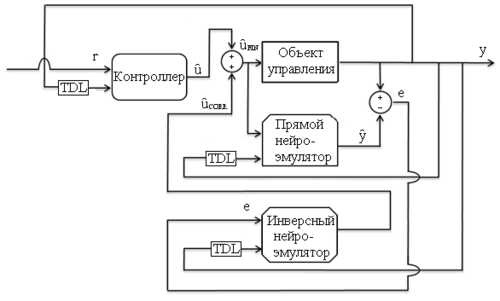
Схема прогнозирующего инверсного нейроуправления
Схема ПИНУ обычно включает два основных нейросетевых блока:
Нейросетевая модель объекта (Neural Network Plant Model): Эта сеть обучается на данных "вход-выход" реального динамического объекта. Ее задача — прогнозировать будущее состояние объекта y(t+k) на заданный горизонт прогноза P, исходя из текущих и прошлых значений входа u(t) и выхода y(t), а также возможных будущих управляющих воздействий.
Нейросетевой контроллер (Neural Network Controller): Эта сеть (инверсная модель) генерирует управляющее воздействие u(t). Она обучается так, чтобы минимизировать ошибку между желаемой траекторией (заданием) r(t+k) и прогнозируемым выходом объекта y(t+k) в пределах горизонта прогноза.
Принципиальная Схема ПИНУ
Основные элементы схемы:
динамический объект: реальная система, которой нужно управлять (например, робот, химический реактор).
Задание r(t): желаемое значение выходной переменной объекта.
нейросетевой контроллер: принимает на вход текущее состояние объекта, ошибку управления и/или желаемое будущее состояние. Выдает управляющее воздействие u(t).
Нейросетевая модель объекта: работает в режиме прогноза. Использует u(t) и текущее состояние для оценки будущих состояний y(t+k).
Оптимизация: на каждом шаге контроллер решает оптимизационную задачу: найти такую последовательность управляющих воздействий на горизонте управления M (M \le P), которая минимизирует функцию стоимости (например, сумму квадратов ошибок) на горизонте прогноза P.
После расчета оптимальной последовательности управляющих воздействий, на объект подается только первое управляющее воздействие u(t), а на следующем такте процесс повторяется (принцип скользящего горизонта).
📈 Влияние горизонта прогноза (P) на управление
Горизонт прогноза (P) — это количество будущих шагов времени, на которые нейросетевая модель объекта предсказывает его поведение, и на которых оценивается ошибка управления. Он играет критически важную роль в качестве и эффективности управления динамическими объектами.
1. Учет динамики и запаздывания
слишком малый P: Если горизонт прогноза меньше, чем время переходного процесса или время запаздывания объекта, контроллер не сможет "увидеть" и учесть полное влияние своих управляющих воздействий. Это приведет к неустойчивости, вялому отклику или перерегулированию, поскольку контроллер реагирует на уже произошедшие, а не на будущие ошибки.
Оптимальный P: горизонт должен быть достаточно большим, чтобы охватить основную динамику объекта и, как минимум, его время запаздывания. Это позволяет контроллеру заранее компенсировать запаздывания и стабилизировать систему.
2. Агрессивность и устойчивость контроллера
Увеличение P: больший горизонт прогноза делает контроллер более дальновидным и, как правило, более устойчивым. Он может лучше спланировать траекторию управления, избегая резких колебаний, и эффективно справляться с ограничениями. Однако, слишком большое P может сделать контроллер менее агрессивным или слишком консервативным, что замедлит реакцию системы на внезапные изменения задания.
3. Вычислительная сложность
Увеличение P: чем длиннее горизонт прогноза, тем больше будущих состояний нужно прогнозировать и тем сложнее становится оптимизационная задача, решаемая контроллером на каждом такте. Это приводит к существенному увеличению объема вычислений и может потребовать более мощного оборудования или увеличить время цикла управления, что критично для быстрых систем.
4. Точность прогноза
Увеличение P: точность прогноза нейросетевой модели естественным образом снижается с увеличением горизонта. Чем дальше в будущее мы прогнозируем, тем больше накапливаются ошибки модели. Слишком большой P может привести к тому, что контроллер будет принимать решения, основываясь на недостоверных прогнозах, что ухудшит качество управления.
Вывод: выбор горизонта прогноза P — это всегда компромисс между обеспечением достаточной стабильности и дальновидности (требует большего P) и сохранением приемлемой вычислительной нагрузки и точности прогноза (требует меньшего P).