Автор: Доктор инж. Алексей В. Смирнов, главный конструктор НИИ Прецизионных Механизмов, автор 150+ патентов на позиционирующие системы.
В мире прецизионного позиционирования, где цены на коммерческие XYZ-стенды начинаются от десятков тысяч евро, а разрешение в 50 нм обычно ассоциируется с пьезоэлектрическими приводами от Physik Instrumente или Aerotech, появился проект, который заставляет переосмыслить понятия "низкая стоимость" и "самостоятельная сборка". Речь идет об открытой платформе Micro Manipulator Stepper (GitHub: 0x23/MicroManipulatorStepper), разработанной энтузиастом под ником Diffraction Limited. Это 3D-печатная (с элементами CNC) микроманипулятор с рабочим объемом 23×23×23 мм³, шагом до 50 нм и интерфейсом G-кода. Стоимость сборки — около 100 евро. Звучит революционно? Давайте разберемся по косточкам, как конструктор с 30-летним стажем в мехатронике.
Техническая суть: Инновации на грани гениальности.
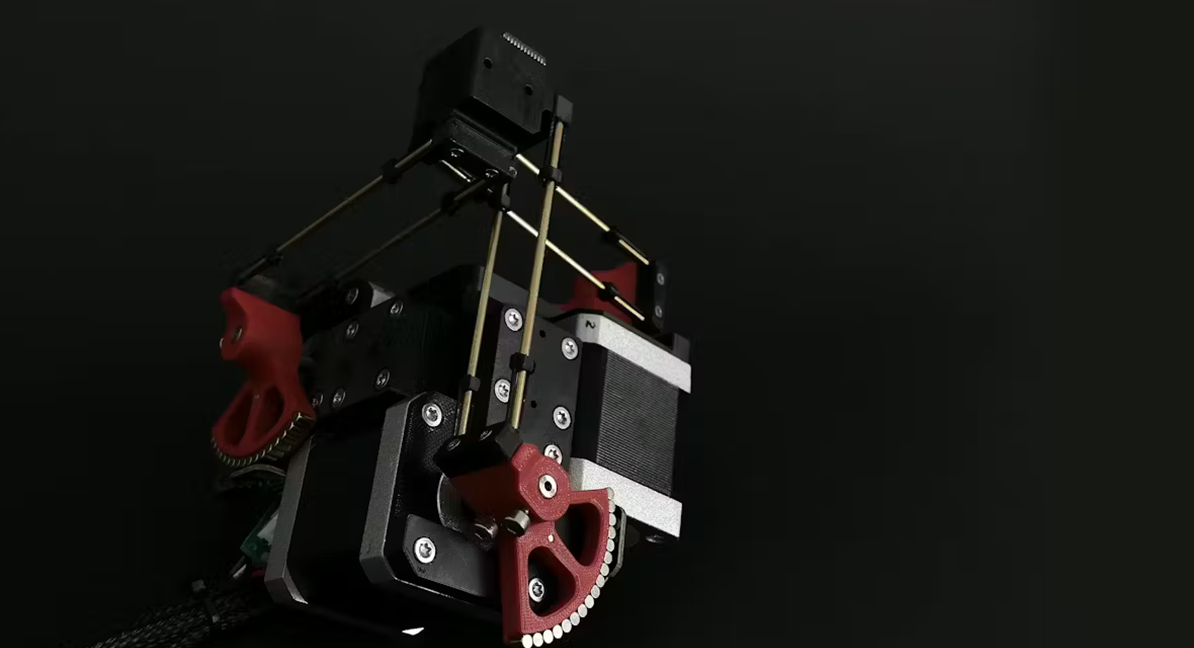
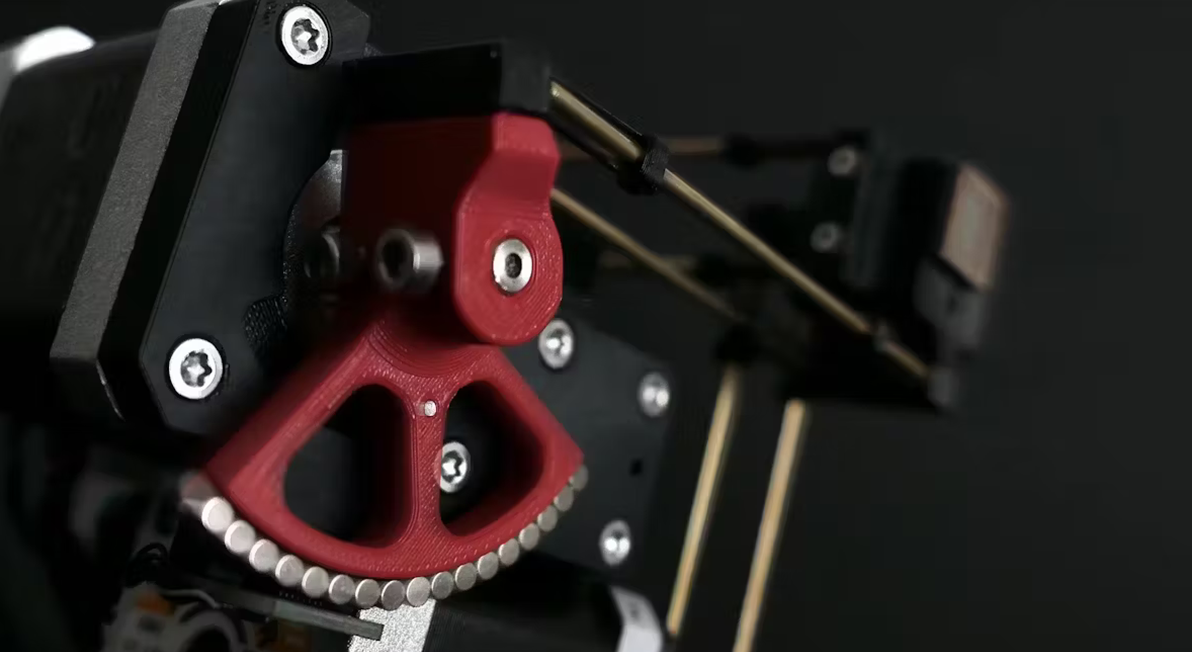
Платформа построена по параллельной кинематике (аналог дельта-робота), где три стержня с шариковыми шарнирами (ball joints) соединяют приводы с подвижной платформой. Это обеспечивает жесткость и отсутствие люфта — ключ к субмикронной точности. Шарниры из миниатюрных шарикоподшипников с прелоадом резиновыми кольцами минимизируют трение, а стержни из латунных трубок (2 мм) — легкие и жесткие.
Приводы и управление:
- Актуаторы: Обычные недорогие шаговые моторы (NEMA-подобные), переведенные в режим DC-серво с помощью H-мостов TB6612 FNG и точного ШИМ (PWM). Разрешение — эквивалент 2500+ микрошагов (~5 угловых секунд).
- Обратная связь: Чип MT 6835 (21-битный магнитный энкодер, ~100 000 отсчетов/об) + линейный массив неодимовых магнитов на роторе. Это "магнитная зубчатая передача" умножает разрешение в 30 раз — до 3 млн отсчетов/об! За 23 мм хода нужно ~1/6 оборота вала, что дает 460 000 шагов, или 50 нм/шаг.
- Контроллер: Raspberry Pi Pico 2 (RP 2350, двухъядерный). Ядро 0 — инверсная кинематика и планирование траекторий (с lookahead). Ядро 1 — 30 кГц петли серво (каскад: позиция → скорость → момент → напряжение, близко к FOC).
- ПО: G-код (G0/G1 для перемещений, G28 homing, M-коды для калибровки). Python API для GUI и автоматизации.
Параметр Значение Комментарий Рабочий объем 23×23×23 мм³ Отлично для микро-оптики Разрешение шага 50 нм Демонстрировано в видеоЧастота петли 30 кГц Высокая для хобби Интерфейс G-код по USB Совместимо с Klipper/Octo Print Стоимость BOM~100 € Без учета принтера/CNC Нагрузка Легкая (микрочипы, волокна)Не для тяжелых образцов
Демо в видео впечатляют: 50-нм шаги под микроскопом (395 нм освещение), автопозиционирование лазера в оптоволокно, трассировка 20-мкм Benchy. Термодрейф виден, но в реальном времени — это прорыв для 100 евро!
Достижения: Почему это круто
- Демократизация. Коммерческие аналоги (PI M-688) — 50 нм, но цена 20 000+ €. Здесь — хобби-бюджет, полная документация (STL, KiCAD, FreeCAD, C++/Python).
- Инженерный хак. Магнитный "гир" — элегантно, без дорогих оптических энкодеров. Параллельная кинематика бьет ортогональные по жесткости.
- Расширяемость. G-код + IK для 6DOF (гексапод). Применения: тестовая литография, пробинг чипов, фокусировка микроскопа.
- Открытость. Discord-сообщество, калибровка в flash. Первые билдеры хвалят
Критика: Где подвох?
Как технолог, я вижу фундаментальные ограничения, маскируемые энтузиазмом:
- Разрешение ≠ Точность/Повторяемость. 50 нм — это шаг, не абсолютная точность. Видео показывает дрейф от тепла (пластик PLA/ABS расширяется на 50–100 мкм/°C). Карбон-филлер помогает, но для 50 нм нужна инваро-сталь или керамика.
Гистерезис в шарнирах (даже с прелоадом), нелинейность магнитного поля (нужна калибровка). Реальная повторяемость — 0,5–1 мкм? - Механика — слабое звено. 3D-печать: Анизотропия, усадка. Рекомендую CNC алюминий/титан для серий.
Трение в шарнирах: 5–10x хуже пьезо. Вибрации (не изолирована) размывают <100 нм.
Нагрузка: <1 г. Для литографии — ок, но не универсал. - Электроника и ПО.PCB v1.2 — брак (короткое 5V-GND, фикс дрелью!). v1.3 ок.
Последовательный G-код: Нет буферизации, траектории простые (линейные/дуговые).
Энкодеры MT6835: Шум/дрейф при 21-бит. 30x гир — круто, но симуляция магнитного поля идеальна; реал — толерансы магнитов ±10%. - Скорость и динамика.Ускорение "ограничено" — реал ~1–10 мм/с? Для траекторий ок, но не для высокоскоростной инспекции.
Нет данных о MTBF, энергопотреблении (2A@6V — греется).
Плюсы Минусы Цена/доступность Термодрейф, низкая жесткость Открытый код Относительная точность Демо-применения Низкая нагрузка/скорость Масштабируемость (6DOF)Баги в ранних ревизиях
Рекомендации и вердикт.
Вердикт: 8/10. Прорыв для DIY/лабораторий — идеально для прототипов оптики/микроскопии. Но для производства — доработка: металл, активная стабилизация (ПИД по температуре), оптическая ОС (IFM). Стоит билдить? Да, если цель — обучение/тесты. Масштабируйте на хексапод — и патентуйте!
Разработчику: Добавьте тесты повторяемости (ASTM E2309), сравнение с PI. Сообщество — групповые закупки BOM.
Это не "убийца" коммерции, но катализатор инноваций. В духе RepRap — от хобби к индустрии.