Функция активации (\text{f}) является ключевым нелинейным элементом в структуре искусственного нейрона, определяя его выходное значение на основе взвешенной суммы входных сигналов. В контексте нейронной сети управляющего звена (нейрорегулятора), применяемой для управления динамическими объектами, выбор и свойства функции активации напрямую зависят от нескольких фундаментальных факторов, связанных как с особенностями самого объекта управления, так и с требованиями к системе регулирования.
1. Требования к нелинейности системы управления
Главная задача функции активации — внесение нелинейности в математическую модель нейросети. Это критически важно, поскольку большинство динамических объектов в реальном мире являются нелинейными (например, аэрокосмические аппараты, химические реакторы, роботизированные системы).
Прямая зависимость: Если бы использовалась только линейная функция активации, вся многослойная нейронная сеть свелась бы к простой линейной модели, неспособной аппроксимировать сложные нелинейные зависимости в динамике объекта. Нелинейность функции активации — это то, что позволяет нейросети выступать в роли универсального аппроксиматора для моделирования сложной инверсной динамики объекта и выработки адекватного управляющего воздействия.
2. Алгоритм обучения нейронной сети
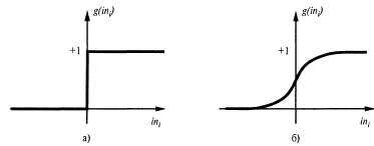
Для обучения большинства нейронных сетей (например, методом обратного распространения ошибки — Backpropagation), необходимо, чтобы функция активации была дифференцируемой на всей или почти всей области определения.
Прямая зависимость: Производная функции активации используется при расчете градиента ошибки, который необходим для корректировки весовых коэффициентов. Поэтому выбор функций, таких как сигмоида (\sigma(x)), гиперболический тангенс (\tanh(x)) или ReLU (Rectified Linear Unit), которые легко дифференцируются, является прямым следствием необходимости эффективного обучения.
Проблема затухающего/взрывающегося градиента: Свойства производной функции активации (её диапазон значений) напрямую влияют на скорость и стабильность обучения. Функции вроде \tanh(x) (диапазон (-1, 1)) часто предпочтительнее сигмоиды (диапазон (0, 1)), так как их выход центрирован относительно нуля, что ускоряет сходимость.
3. Требуемый диапазон выходного сигнала управления
Выходной сигнал нейронной сети управляющего звена — это непосредственно управляющее воздействие, подаваемое на объект (например, угол отклонения руля, мощность двигателя, расход топлива). Диапазон этого сигнала часто ограничен физическими возможностями исполнительных механизмов объекта.
Прямая зависимость:
Если управляющее воздействие должно находиться в строго ограниченном диапазоне, например, от 0 до 1 или от -1 до 1 (для нормализованного сигнала), то выбор часто падает на сигмоиду (для диапазона (0, 1)) или гиперболический тангенс (для диапазона (-1, 1)) в выходном слое нейросети.
Если же управляющее воздействие может принимать практически любые значения (например, при управлении некоторыми непрерывными параметрами), или если диапазон не ограничен насыщением, может использоваться линейная функция активации в выходном слое.
4. Особенности динамического объекта и тип решаемой задачи
Характеристики самого объекта управления и вид решаемой задачи нейроуправления (идентификация, прямое управление, инверсное управление) также диктуют требования к функции активации.
Скрытые слои: В скрытых слоях нейрорегулятора, как правило, используются функции, обеспечивающие хорошую нелинейную аппроксимацию, например, ReLU или её варианты (Leaky ReLU), поскольку они обладают вычислительной эффективностью и помогают избежать проблемы затухающего градиента, распространенной в глубоких сетях.
Специфика объекта: При работе с рекуррентными нейронными сетями (RNN), которые по своей природе являются динамическими системами и часто используются для управления сложными объектами, \tanh часто применяется в скрытых слоях для формирования внутреннего состояния сети, так как обеспечивает центрированный по нулю выход.
Заключение
Таким образом, функция активации нейронной сети управляющего звена напрямую зависит от:
Необходимости внесения нелинейности для аппроксимации сложной динамики управляемого объекта.
Требований алгоритма обучения (в частности, необходимости дифференцируемости).
Физических ограничений и требуемого диапазона управляющего сигнала на выходе.
Типа архитектуры нейросети (например, выбор \tanh в RNN или ReLU в глубоких сетях).
В целом, выбор функции активации — это компромисс между способностью сети эффективно аппроксимировать нелинейные зависимости и стабильно обучаться на конкретной задаче управления.