
В области инженерного моделирования и робототехники часто требуется не только вычислить динамику механизма, но и наглядно представить его движение. Это достигается путем синхронизации математической модели, созданной в MATLAB (и Simulink), с ее трехмерной (3D) визуализацией.
Ключевые инструменты и технологии
Для реализации этой задачи экосистема MathWorks предоставляет несколько мощных инструментов:
Simulink: Среда блочного моделирования, которая идеально подходит для создания динамических систем и реализации законов управления.
Simscape Multibody: Специализированный набор блоков Simulink для моделирования многотельных механических систем (рычаги, шарниры, приводы и т.д.).
MATLAB/Simulink API: Интерфейсы для передачи данных о положении и ориентации звеньев механизма.
Программное обеспечение для 3D-визуализации:
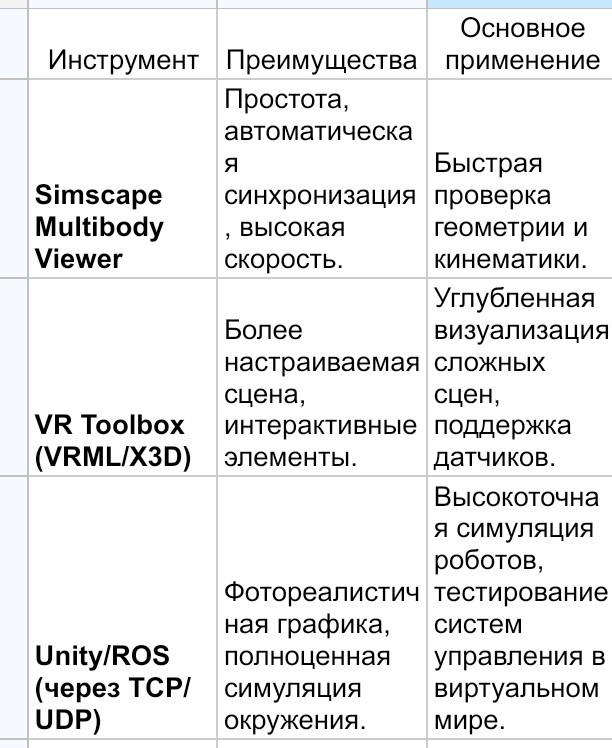
Simscape Multibody Viewer (SmbViewer): Встроенный инструмент для просмотра 3D-геометрии, связанной с Simscape Multibody.
VR Toolbox (Virtual Reality Toolbox): Надстройка MATLAB для взаимодействия с 3D-сценами, созданными в формате VRML/X3D.
Unity/Unreal Engine/ROS: Более сложные внешние среды, используемые для продвинутой визуализации или моделирования реальных роботов.
Шаг 1. Создание математической модели (Simulink/Simscape Multibody)
1.1. Моделирование в Simscape Multibody
Наиболее эффективный способ построить математическую модель механизма в MATLAB/Simulink – это использовать Simscape Multibody.
Импорт CAD: Вы можете импортировать 3D-геометрию звеньев механизма (например, в форматах STL, STEP или из SolidWorks/Inventor) непосредственно в Simscape Multibody.
Сборка: Используйте блоки Bodies (тела), Joints (шарниры) и Constraints (ограничения) для создания кинематической цепи, соответствующей вашему механизму.
Приводы: Блоки Actuators (приводы) и Sensors (датчики) позволяют вводить управляющие сигналы (например, крутящий момент или скорость) и считывать данные о положении и силах.
💡 Преимущество Simscape Multibody: Он автоматически генерирует и решает нелинейные дифференциальные уравнения движения (динамическую модель) на основе геометрии и массово-инерционных характеристик, избавляя инженера от ручного вывода уравнений.
Шаг 2. Связывание модели и 3D-визуализации
2.1. Визуализация с помощью Simscape Multibody Viewer
При использовании Simscape Multibody 3D-визуализация является встроенной.
Запуск: После создания модели достаточно нажать кнопку "Update Diagram" или "Run", чтобы открыть Simscape Multibody Viewer.
Синхронизация: В процессе симуляции Viewer автоматически отображает движение механизма в 3D-пространстве, используя импортированную геометрию звеньев и данные о положениях, рассчитанные решателем Simulink.
2.2. Продвинутая визуализация через VR Toolbox (VRML/X3D)
Если требуется более детальная, интерактивная или настраиваемая 3D-сцена, можно использовать VR Toolbox.
Создание 3D-сцены:
Создайте файл 3D-сцены (например, mechanism.wrl или mechanism.x3d) с помощью внешних 3D-редакторов (например, Blender, V-Realm Builder) или экспортируйте его из Simscape Multibody.
В этом файле определяются объекты (звенья механизма) как узлы (nodes).
Блок VR Sink:
В Simulink добавьте блок VR Sink (виртуальная реальность).
Свяжите этот блок с созданным 3D-файлом.
Передача данных:
Используйте блоки Simulink-to-World Transform или стандартные выходы Simscape Multibody для получения данных о положении (Translation) и ориентации (Rotation) ключевых звеньев механизма.
Подключите эти данные к соответствующим входным портам блока VR Sink. VR Toolbox автоматически обновляет положение и ориентацию 3D-объектов в файле VRML/X3D, синхронизируя их с симуляцией.
Шаг 3. Взаимодействие с внешними 3D-средами
Для самых сложных задач (например, симуляция взаимодействия робота с окружающей средой, дополненная реальность) используются внешние игровые движки или робототехнические фреймворки.
3.1. MATLAB/Simulink с Unity или ROS
Передача данных: Используется двусторонний обмен данными по протоколам TCP/IP или UDP.
MATLAB/Simulink вычисляет динамику и управляющие сигналы.
MATLAB/Simulink передает угловые положения шарниров (Joint Angles) внешнему 3D-движку.
Внешний движок (Unity/ROS) использует полученные углы для обновления кинематики и визуализации 3D-модели.
Обратная связь: Внешний движок может передавать в MATLAB/Simulink данные о состоянии окружающей среды (например, данные с виртуальных камер, датчиков столкновения), что позволяет реализовать замкнутый цикл управления в виртуальной среде.
Интеграция математической модели механизма из MATLAB/Simulink с его 3D-моделью не только повышает наглядность, но и является критически важным шагом для отладки управляющих алгоритмов перед их внедрением в реальное оборудование.