ExpressLRS (ELRS) — это протокол с открытым исходным кодом, который завоевал огромную популярность благодаря низкой задержке, высокой помехозащищенности и большой дальности полета. Учитывая высокую стоимость пультов управления для агродронов, рассмотрим подключение пульта управления Radiomaster TX12 и особенности настройки на примере полетного контроллера Pixhawk 6C.
Для начала нам потребуется определить, на какой порт мы можем подключить приемник управления. Для этого обратимся к технической документации.
- SERIAL0 -> USB
- SERIAL1 -> UART7 (Telem1) RTS/CTS pins
- SERIAL2 -> UART5 (Telem2) RTS/CTS pins
- SERIAL3 -> UART1 (GPS1)
- SERIAL4 -> UART8 (GPS2)
- SERIAL5 -> UART2 (Telem3) RTS/CTS pins
- SERIAL6 -> UART3 (USER) (Debug p)
- SERIAL7 -> USB (can be used for SLCAN with protocol change)
Для подключения приемника CRSF к Pixhawk 6C рекомендуется использовать SERIAL5 (UART2).
Для начала нам требуется припаять к приемнику провода и собрать разъем JST-gH 6 pin согласно технической документации.
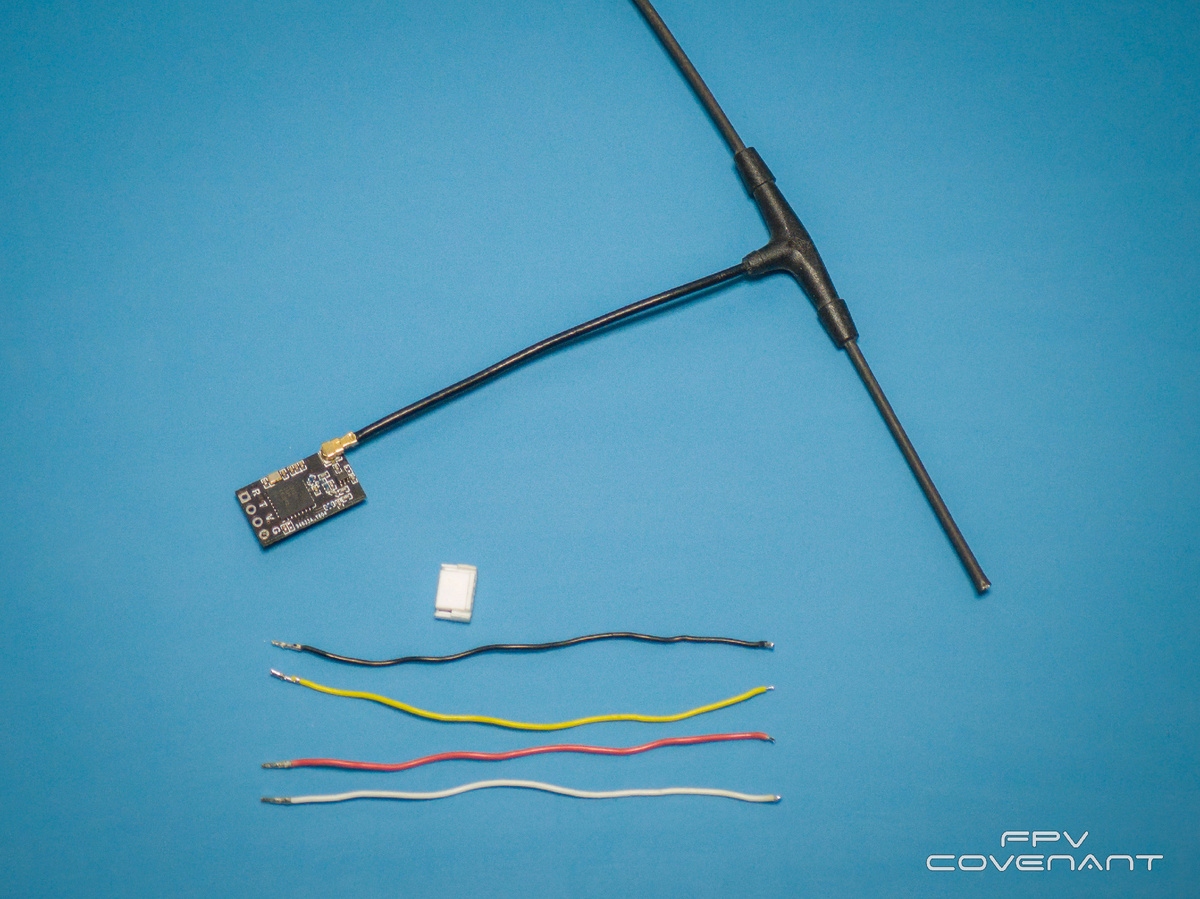
Чтобы не перепутать положение проводов обратимся к распиновке.
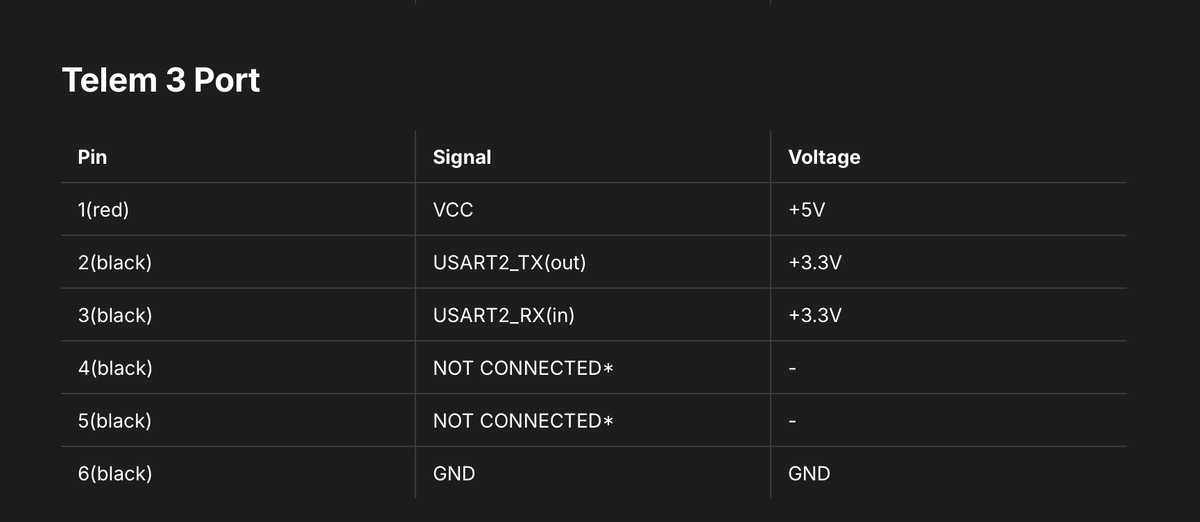
Протокол CRSF требует двусторонней связи (RX и TX) и двух проводов +5 В и GND.
Хочется напомнить что мы используем перекрестное подключение. Выход приемника (TX) подключается ко входу Pixhawk (RX) (TELEM3), и наоборот.
Готовый модуль подключаем в разъем TELEM3.
Теперь перейдем непосредственно к настройкам.
Подключаем кабель USB Type-C от компьютера к полетному контроллеру и запускаем Mission Planner.
Выбираем порт подключения и нажимаем CONNECT. Система подключится к Pixhawk.
Переходим во вкладку CONFIG, выбираем FULL PARAMETER LIST. Так как мы подключились к SERIAL 5, ищем его в дереве параметров.
Нас интересует два параметра, которые мы меняем.
Serial5_protocol = 23 (RCIN);
Serial5_baud = 115.
И нажимаем справа Write Params.
Далее ищем в дереве RSSI_TYPE. Тут нам потребуется изменить
RSSI_TYPE = 3.
И нажимаем справа Write Params.
Далее переходим в раздел RC.
Выбираем параметр RC_options и в открывшемся меню ставим галочки над параметрами:
- Arming check throttle for 0 input;
- Use passthrough for CRSF telemetry;
- Suppress CRSF mode/rate message for ELRS systems;
- Use Link Quality for RSSI with CRSF;
- Annotate CRSF flight mode with * on disarm;
- Use 420kbaud for ELRS protocol.
И нажимаем справа Write Params.
Теперь отключаемся от Mission Planner, отключаем разъем USB, чтобы перезагрузить полетный контроллер.
Подключаем к полетному контроллеру аккумулятор, включаем пульт управления. Бинд приемника и пульта при правильных настройках произойдет автоматически.
Мы сейчас не будем рассказывать, как произвести биндинг приемника с передатчиком ELRS. О настройках ранее уже рассказывалось в статье:
Подключаем USB провод к полетному контроллеру, запускаем Mission Planner и коннектимся.
Переходим во вкладку SETUP и выбираем раздел Radio Calibration.
Тут мы можем подергать стиками на пульте и увидеть как двигаются полоски в окне - значит пульт удачно настроили.
Откалибруем пределы работы стиков и кнопок управления пульта. Нажимаем Calibrate Rate и нажимаем все переключатели на пульте и переводим стиками в крайние положения.
Увидим красные флаги указывающие на крайние значения каналов. По окончанию нажимаем Done.
Процесс настройки пульта удачно окончен.
Переходим в FLIGHT MODES. Сначала просто посмотрим на него. В этом разделе мы выставляем режимы полета на ОДИН какой нибудь тумблер.
По умолчанию программа предлагает использовать тумблер 5 канала, этот тот тумблер, который мы уже ранее привыкли использовать для АРМа дрона. И к тому же если его пощелкать, он подсвечивает только два положения, думая что он двухпозиционный.
Мы приняли решение для начала изменить тумблер для режимов полета. Для этого переходим в раздел CONFIG, выбираем FULL PARAMETER LIST, ищем в дереве FLTMODE и в функции FLTMODE_CH устанавливаем значение 6.
Обязательно не забываем нажать кнопку WRITE PARAMS.
Сразу же пока находимся тут, ищем в дереве RC5, выбираем RC5_OPTION и вводим значение 153. Это мы назначили функцию ARM/DISARM на наш привычный тумблер 5 канала.
Обязательно не забываем нажать кнопку WRITE PARAMS.
Переходим в FLIGHT MODES. Проверяем канал - 6, отлично!
Теперь переключая тумблер 6 канала мы видим как подсвечивает зеленым каждое положение.
Перезагружем дрон и пробуем на пульте управления дернуть тумблер ARM/DISARM.
Моторы пришли в движение! Настройка прошла удачно.
При подключениии пульта Radiomaster к большому дрону имеется задержка при увеличении газа. Проблема частая!
В случае если приемник подключен на SERIAL5 переходим в FULL PARAMETER LIST и ищем в дереве SR5 (для SERIAL 5). Выбираем параметр SR5_RC_CHAN и повышаем частоту.
Если приемник подключен к другому порту, то изменяем настройки по соответсвующему номеру. Дрон стал более отзывчевее.
Подключение ELRS к Pixhawk 6С — это процесс, который сводится к правильному физическому подключению четырех проводов и настройке нескольких параметров в конфигураторе. Взамен вы получаете одну из самых популярных систем радиосвязи в мире FPV, интегрированную с мощной и стабильной платформой Pixhawk для автономных полетов.