Нам удалось провести очень большую работу по сборке гексакоптера Вампир и очень хочется сказать слова Благодарности всем причастным к этому. Теперь перед нами стоит задача по прошивке полетного контроллера и подготовке к первому запуску моторов.
Мы не хотим перегружать одну статью информацией, поэтому разделим настройку на несколько этапов. Сегодня мы прошьем полетный контроллер Pixhawk6C и осуществим тестовый запуск моторов.
Для начала подключим USB кабель к полетному контроллеру и запустим Mission Planner.
Важная особенность - при прошивке нам не требуется нажимать кнопку CONNECT. Мы переходим во вкладку SETUP, выбираем INSTALL FIRMWARE и по картинке тип нашей рамы гексакоптер.
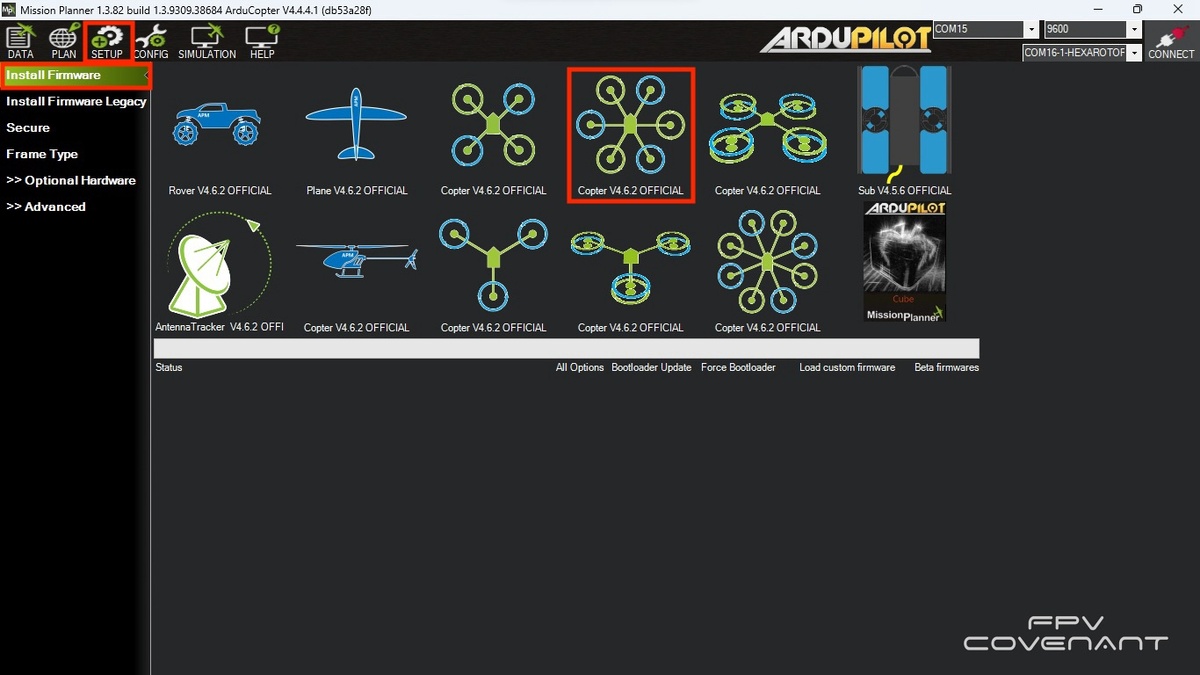
Mission Planner автоматически попытается определить тип полетного контроллера и последнюю стабильную прошивку. В этом же меню можно выбрать прошивку с поддержкой моторов Dshot, но в нашем случае для моторов Hobbywing X8 она не требуется, и мы сразу нажимаем кнопку Upload Firmware.
Немного томительного ожидания пока не увидим сообщение Upload Done.
Очень интересная особенность - обновление прошивки до более новой версии не изменяет существующие параметры. То есть, если вы взяли полетник с какого-нибудь другого подобного дрона и обновили прошивку, то параметры останутся со старого дрона. Чтобы обнулить все, можно сначала прошить контроллер на любой другой вид транспортного средства (например ровер или самолет), а потом прошить снова на гексакоптер. В этом случае параметры сбрасываются до значений по умолчанию для выбранного транспортного средства.
Далее переходим в раздел DATA, выбираем подключенный COM порт или режим AUTO и нажимаем кнопку CONNECT.
После успешного подключения переходим в раздел SETUP и выбираем FRAME TYPE - тут нам требуется выбрать правильный тип рамы для нашей сборки. Выбираем картинку гексакоптер.
Следующая вкладка меню INITAL TUNE PARAMETRS. Тут нам предлагается указать размер рамы дрона в дюймах, тип батареи, количество ячеек в батарее и минимальное и максимальное напряжение на ячейку.
Установив свои параметры нажимаем кнопку CALCULATE INITIAL PARAMETERS.
Программа самостоятельно на основе введенных данных рассчитает параметры. Нам потребуется пока согласиться с ними, и нажать на WRITE TO FC (Записать в полетный контроллер).
Далее во вкладке ACCEL CALIBRATION мы проведем калибровку акселерометра. Первый пункт мы пока не трогаем, так как в нем требуется вертеть дрон вверх ногами и для нас это проблематично из-за размеров. Выберем второй и третий пункт. Последний часто срабатывает с нескольких нажатий.
Переходим в раздел SERVO OUTPUT. Тут есть некоторые особенности на которые потребуется обратить внимание.
Так как у нас модуль PWM подключен к разъему I/O PWM OUT на полетном контроллере то в разделе SERVO OUTPUT нас будут интересовать первые 6 выходов PWM.
Пропишем соответственно моторы от 1 до 6.
Если бы мы выбрали на полетном контроллере выход FMU PWM OUT то в разделе SERVO OUTPUT нам бы потребовалось выбрать моторы на выходах с 9 по 14 соответственно.
На этом этапе мы отключаемся от Mission Planner и подключаем аккумуляторную батарею.
Мы будем использовать специально изготовленный для нашего проекта по сборке и настройке гексакоптера, аккумулятор от коллег "Полётный".
Подключаемся снова к полетному контроллеру через Mission Planner и переходим во вкладку ESC CALIBRATION.
Больше всего тут нас интересует тип регуляторов оборотов моторов. Для наших моторов X8 требуется выбрать NORMAL.
По поводу функции Calibrate ESC - спорная функция. Заставляет зависать систему с некоторыми типами регуляторов. Стоит пробовать только в крайнем случае. Мы пока не будем ее трогать.
Переходим в раздел MOTOR TEST. Именно тут мы можем покрутить моторами и убедиться правильно ли мы выбрали порядок моторов во вкладке SERVO OUTPUT.
Нажимаем на кнопку TEST Motor A - должен закрутиться мотор под номером 5. Правильность соответствия включения остальных моторов проверяем по схеме.
Нас может ждать несколько сюрпризов. Один из самых частых - выскакивает ошибка Command was denied by the autopilot.
Проблема решается нажатием кнопки SWITCH на несколько секунд на модуле GPS. Светодиод должен загореться постоянным светом а моторы должны перестать пищать.
Если после нажатия этой кнопки писк моторов продолжается, то только в этом случае мы пробуем провести калибровку моторов.
Так же может потребоваться поддать газку. Для этого в Throttle установим значение 15.
Наконец то наши моторы пришли в движение!
При настройке с нуля может появиться проблемма когда моторы при включении дрона не готовы к работе ( редкий регулярный сигнал ). Проблемма в том, что при перепрошивке полетного контроллера функция SAFETY SWITCH включена. Условно можно эту функцию обозвать "Предохранитель" запуска мотров и сервоприводов. Чтобы моторы запустились требуется нажать длительно на кнопку (если она смонтирована).
При длительном нажатии на кнопку SAFETY SWITCH полетный контроллер подготавливает моторы к запуску отправляя на регулятор оборотов значения минимального и максимального газа. При успешной подготовке к работе моторов мы слышим длинный писк моторов и тишину. К запуску готов.
С включенной функцией SAFETY SWITCH очень неудобна калибровка моторов. Эту функцию можно отключить.
Запускаем MISSION PLANNER, подключаемся к полетному контроллеру и переходим в FULL PARAMETER LIST. В ветке находим BRD и меняем значение BRD_SAFETY_DEFLT на значение 0. Не забываем записать изменения в полетный контроллер нажимая WRITE PARAMS.
Отключаем питание и подключаем батарею. Мы услышим несколько коротких сигналов от мотора и один длинный. Значения получены, моторы готовы к запуску.
Для того чтобы моторы работали равномерно и стартовали одновременно требуется установить минимальное значение длительности сигнала 1102 (для вампира).
Перезапускаем дрон и пробуем тест моторов. Моторы должны запуститься одновременно и с одной скоростью.
На данном этапе наша задача выполнена - моторы запустились. В следующий раз мы с вами подключим пульт управления, настроим и откалибруем его. Попробуем запустить моторы уже непосредственно с пульта.
Сборка гексакоптера это очень интересное испытание которое дарит нам хороший опыт. Сейчас мы переходим на следующую стадию, когда сборка fpv дрона уже кажется чем то очень простым.
Для тех кто хочет посмотреть лист параметров с заводской прошивки "Вампира", можно скачать тут.
Кстати у нас на канале есть закрытый раздел в котором есть большая статья о сборке рамы "Вампира".
Получить доступ можно оформив "Премиум подписку" на наш канал. Самая простая подписка которую позволяет установить ДЗЕН - это меньше стоимости чашки кофе! Для нас это будет ощутимой поддержкой чтобы в скором времени предоставить новые разработки и модели.