В обычной лапароскопии рука хирурга может выполнять лишь четыре типа движений. Робот da Vinci добавляет ещё три «лишние» степени свободы — и меняет правила игры. Разберём, зачем нужны эти три дополнительных оси и как они повышают точность операций, безопасность пациентов и комфорт хирургов.
Что такое степень свободы
Степень свободы (DOF, degrees of freedom) — это количество независимых направлений движения или вращения, которыми располагает манипулятор. В робототехнике и анатомии каждая степень свободы соответствует одной оси движения или вращения.
Человеческая рука в лапароскопии: только 4 DOF
При лапароскопии инструменты вводятся через небольшие отверстия (троакары). В таких условиях анатомическая гибкость руки хирурга резко ограничивается:
1. Наклон вперёд–назад вокруг точки входа в брюшную полость
2. Наклон влево–вправо вокруг той же точки
3. Вращение инструмента вокруг собственной оси
4. Выдвижение и втягивание вдоль оси инструмента
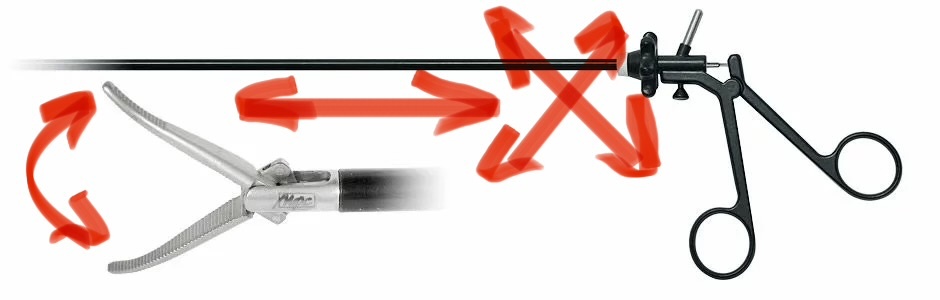
Таким образом, вне анатомии кисти и пальцев рука фактически работает только в четырёх плоскостях.
Роборука da Vinci: 7 степеней свободы
Робот da Vinci оснащён «запястными» суставами на кончиках инструментов и дополнительными сочленениями на манипуляторе. Это даёт семь степеней свободы. Вот те которых не хватало:
5. Сгибание «запястья» в одной плоскости
6. Сгибание «запястья» в перпендикулярной плоскости
7. Дополнительное вращение «запястья» вокруг своей оси

Благодаря этим трём «запястным» осям инструмент может повторять почти все движения человеческой кисти вне ограничений троакара.
Преимущества для пациента
Минимальный размер разрезов сохраняется тот же, но манёвренность увеличивается.
Точность манипуляций при наложении швов и диссекции мягких тканей возрастает.
Меньший риск осложнений: меньше микроразрывов сосудов и нервов, снижается кровопотеря.
Быстрое восстановление благодаря щадящей технике и аккуратности движений.
Преимущества для хирурга
Ергономика и комфорт: управление рычагами на консоли снимает нагрузку на плечи и кисти.
Стабильность движений: программная фильтрация дрожания рук.
Расширенный обзор благодаря 3D-камерам высокого разрешения.
Возможность сложных приёмов: обход критических структур, доступ к труднодоступным зонам.
Заключение
В ограниченных условиях лапароскопии человеческая рука фактически способна на четыре типа движений. Семистепенные инструменты роботизированных систем, таких как da Vinci, возвращают хирургу гибкость и точность, приближаясь к возможностям анатомического прототипа кисти, но без её физических ограничений. Это меняет стандарты минимально инвазивной хирургии, делая её безопаснее для пациентов и комфортнее для специалистов.