
Нейросетевое безмодельное прогнозирующее управление (НБПрУ), или Model-Free Neural Network Predictive Control (MF-NNPC), представляет собой передовой подход в теории управления, который сочетает принципы Прогнозирующего Управления (MPC) с мощью глубоких нейронных сетей. Его ключевое отличие и преимущество заключается в способности управлять сложными, нелинейными и плохо изученными объектами без необходимости в точной математической (модельной) описании их динамики.
1. Суть проблемы и концепция MPC
Традиционное прогнозирующее управление (MPC) является одним из наиболее эффективных методов управления, особенно в промышленности. Его основной принцип — оптимизация управления на каждом шаге, при которой контроллер:
Прогнозирует будущее поведение объекта на конечном горизонте времени, используя его математическую модель.
Находит последовательность управляющих воздействий, которая минимизирует целевую функцию (например, ошибку следования заданию) и удовлетворяет ограничениям.
Применяет только первое воздействие из найденной последовательности, а затем повторяет процесс на следующем шаге (принцип скользящего горизонта).
Проблема: эффективность классического MPC критически зависит от точности модели объекта. Для очень сложных, изменяющихся или нелинейных систем (например, в робототехнике, аэрокосмической отрасли или некоторых химических процессах) создание и поддержание точной физической модели чрезвычайно трудоемко или невозможно.
2. Принцип безмодельного управления
Безмодельный подход (Model-Free) устраняет эту зависимость, заменяя явную математическую модель механизмом, который учится прогнозировать или управлять напрямую из данных взаимодействия с объектом.
В контексте НБПрУ это реализуется двумя основными путями:
A. Предиктор, основанный на нейронной сети (NN-Based Predictor)
В этом подходе нейронная сеть (часто рекуррентная нейронная сеть, RNN, или Трансформер) используется для идентификации системы (System Identification):
Обучение: сеть обучается на исторических данных "вход-выход" объекта, чтобы предсказывать будущие состояния или выходы системы при заданных управляющих воздействиях.
Применение: эта обученная нейросеть (модель-суррогат) заменяет собой физическую модель в контуре классического MPC. Оптимизация на каждом шаге продолжает проводиться, но уже с использованием прогнозов, выданных нейросетью. Строго говоря, это не полностью "безмодельный" подход, а "модельный с использованием нейросетевой модели" (NN-Model Predictive Control), но он не требует априорной физической модели.
B. Управление, основанное на обучении с подкреплением (Reinforcement Learning - RL)
Это наиболее безмодельный подход. Он полностью обходит этап явного прогнозирования и оптимизации на каждом шаге.
Обучение: искусственный интеллект (агент) обучается, взаимодействуя с объектом (средой) и получая "награды" (Reward) за хорошие действия и "наказания" за плохие, в соответствии с целевой функцией (которая в MPC была бы функцией стоимости).
Сеть Критика/Актера (Actor-Critic): Используются две нейронные сети:
Сеть Актера (Policy Network): напрямую генерирует управляющее воздействие.
Сеть Критика (Value Network): оценивает, насколько "хорошим" является текущее состояние и, по сути, заменяет собой функцию стоимости и прогнозирование, оценивая будущую суммарную награду.
Предиктивность: принципы MPC, такие как минимизация ошибки на горизонте, имплицитно заложены в функцию награды RL-алгоритма, заставляя его выбирать действия, оптимальные для достижения цели в долгосрочной перспективе.
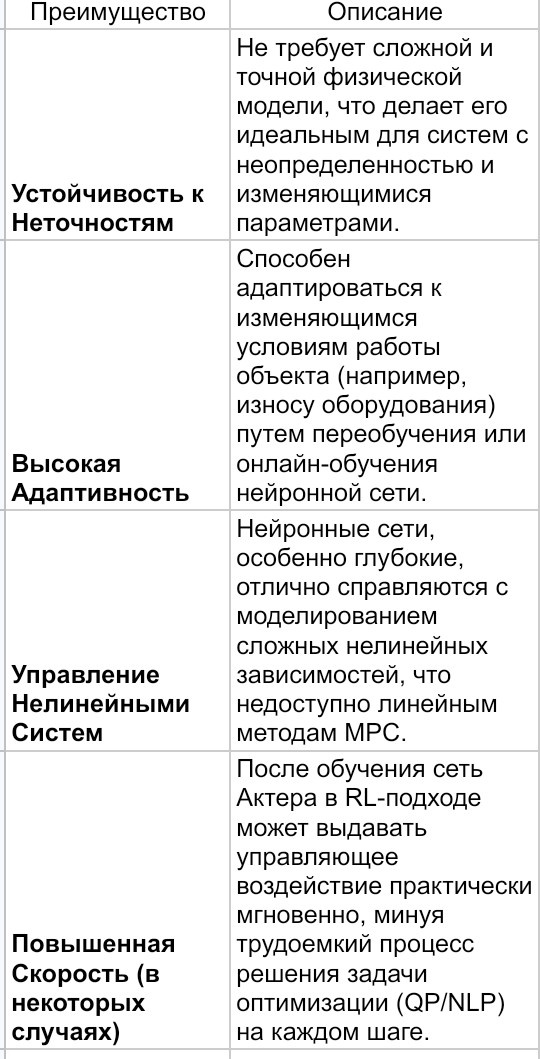
3. Преимущества НБПрУ
4. Области Применения
Нейросетевое безмодельное прогнозирующее управление находит применение в тех областях, где высока сложность динамики и важна быстрая реакция:
Робототехника: высокоскоростное маневрирование беспилотных летательных аппаратов (БПЛА) и манипуляторов.
Энергетика: управление преобразователями мощности и микросетями, где динамика может быть сильно нелинейной.
Автономный Транспорт: системы управления движением и траекторией.
Химическая Промышленность: управление сложными реакторами и процессами с трудно поддающейся моделированию динамикой.
5. Вызовы и перспективы
Главными вызовами НБПрУ остаются интерпретируемость (почему сеть приняла именно такое решение) и гарантии устойчивости (сложность математического доказательства устойчивости замкнутого контура с нейросетевым контроллером).
Тем не менее, стремительное развитие Глубокого Обучения с Подкреплением (Deep Reinforcement Learning) и методов для обеспечения безопасности и надежности нейросетевых контроллеров делает НБПрУ одним из наиболее перспективных направлений в современной теории управления.